基于GIS的三维交通噪声屏障路段环评可视化技术研究与实践
2020-05-16吴培宁
吴 培 宁
(中国劳动关系学院计算机网络应用研究所 北京 100048)
0 引 言
随着城市交通流量的增加与道路建设的加快,城市快速路、高架复合道路以及高速公路等交通干道的建设越来越多,交通噪声给周边环境特别是道路两侧的高层建筑带来了严重的噪声污染,是亟待解决的城市主要环境问题之一。GIS系统具有强大的空间数据处理和显示功能[1],可对空间数据及相关属性信息进行有效的管理,近年来在社会需求的推动下飞速发展[2-3]。基于GIS的二维环评可视化系统在大气环境与地面水环境环评中已取得了良好的应用效果[4-5]。
目前,基于GIS的二维评价区域交通噪声环评可视化是研究的热点[6-9]。文献[7-8]分别实现了无路基声影区的城市地面道路与高速公路地面路段的交通噪声模拟计算与可视化。文献[9]通过MapInfo系统二次开发,实现了有路基声影区的高架道路交通噪声环评可视化,但仍存在以下问题:1) 仅生成了评价区域地表平面处二维笛卡尔网格;2) 采用的交通噪声环评计算模型中未考虑声屏障的衰减量计算,无法用于有声屏障路段的环评计算与可视化分析。
声屏障已成为城市道路噪声降噪的主要手段[10],各种声屏障插入衰减量计算模型以及新型声屏障材质与结构的研究已成为研究的热点与难点问题[11-15]。但目前对声屏障降噪的预测计算仅局限于二维评价区域内离散点的噪声预测计算,适用于区域噪声环评可视化的三维大数据场预测计算目前还未实现。
基于GIS的声屏障路段三维交通噪声环评可视化能够为环评提供科学依据、基础资料与决策支持,对于高架道路声屏障的规划与建设也具有十分重要的指导意义。针对文献[9]研究的不足以及声屏障路段三维交通噪声环评可视化在网格剖分、声影区与声照区判定、绕射声衰减量计算及噪声数据场可视化等方面的难点问题,本文实现了以下创新:1) 提出了基于自适应分层切割单元法的交通噪声三维评价区域网格生成方法。2) 提出了各分层内声照区长度计算公式,声影区与声照区判定及其笛卡尔网格生成方法。3) 提出了满足区域环评计算要求的声屏障插入衰减量计算方法。4) 采用了分层等值线可视化显示方法。
应用上述方法开发了基于GIS的三维交通噪声屏障路段环评可视化系统。
1 交通噪声三维评价区域网格生成
1.1 道路交通噪声三维评价区域
文献[16]规定地面评价范围为道路中心线外两侧200m以内,考虑到高架道路本身的高度以及地面反射对高处噪声的增强作用,本文将评价区水平宽度设定为随高度增加而增加,道路三维评价区域内距地面任一高度处的宽度由下式确定:
(1)
式中:Dh为距地面高度为h(h=0,1,…,h评)处,道路中心线至评价区域一侧边界的垂直距离;B为道路宽度,H为道路中心线距地面高度;θ(0<θ<90°)为评价区域外边界面与地面的夹角,其取值与评价道路交通流量逆相关。
规划道路中心线段集由下式表示:
R={(x0,y0,H0),…,(xi,yi,Hi),…,
(xn,yn,Hn)}
(2)
式中:R为规划道路的中心线段集;(xi,yi)为某一道路中心线段的端点;Hi为该端点距地面高度。
交通噪声三维评价区域为沿道路两侧的两组梯形多面体。如图1所示,其道路一侧三维评价区域多面体的高度为评价区域高度h评,该多面体的内边界为沿道路一侧边界线段且垂直于地面的一组平面,外边界为距道路中心线Dh处与地面夹角为θ的一组平面。
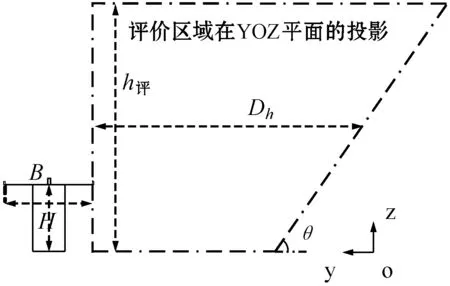
图1 高架道路YOZ平面噪音评价区域
如图2所示,沿道路中心线前进方向,其道路左侧及右侧边界线段集由Rl及Rr表示,则:
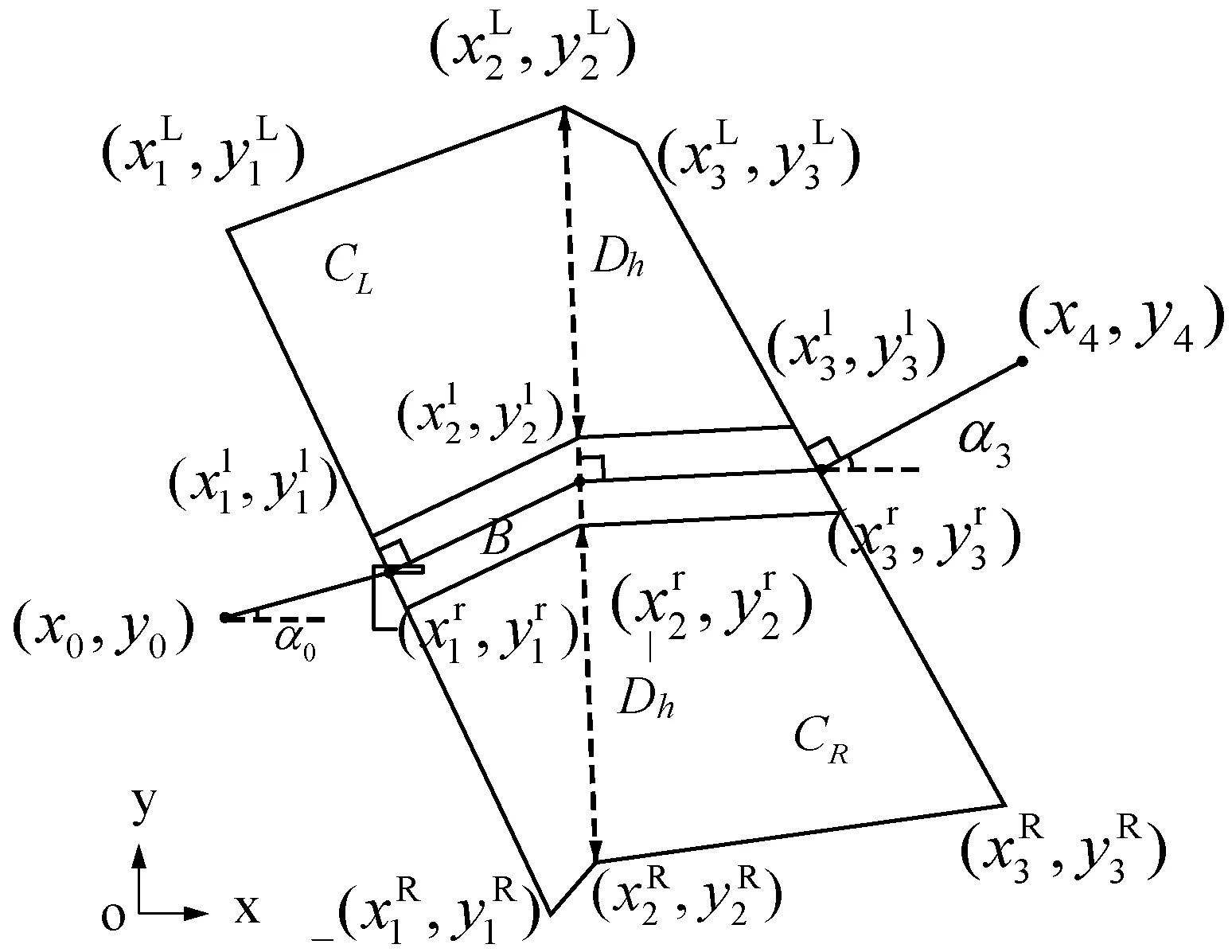
图2 高架道路XOY平面噪音评价区域
与道路中心线位于同一水平高度H的评价区域边界线段集由RL及RR表示,则:
在距地面高度h处(h=0,1,…,h评)且平行于XOY平面的平面上,沿顺时针方向排列的左侧评价区域边界线端点集由CL,h表示,右侧评价区域边界线端点集由CR,h表示。
1.2 基于道路几何特征的自适应变层厚切片算法
三维评价区域环评计算网格生成分为两个步骤:1) 采用一组切割平面切割评价区域多面体;2) 在各切割平面内采用笛卡尔切割单元法生成二维笛卡尔网格。
对于复杂道路系统,若采用固定层厚切割平面族,则无法兼顾环评计算的精度与效率。因此本文采用了基于道路几何特征的自适应变层厚技术,对于水平弯曲系数及纵坡坡度变化较小的评价道路采用较大的切割层厚度,反之则采用较小的层厚。其算法如下:
步骤1 对于由式(2)表示的规划道路,计算其水平弯曲系数k及纵坡坡度η。
(3)
(4)
步骤2 对于切割平面族,先取一个固定层厚Zh,则自适应层厚为:
(5)
由评价区地面至h评,以ΔZh为层厚生成一组切割平面,每个平面与评价区域多面体求交,得到两个评价多边形。对于第j个切割平面,其沿道路中心线左侧评价多边形端点集为:

沿道路中心线右侧评价多边形端点集为:
步骤3 在第j个切割平面内,采用笛卡尔背景网格与其沿道路中心线左右侧评价多边形端点集CL,j与CR,j中的每一条边界线段逐一求交,求交过程为切割单元交点追踪过程。当完成交点追踪后,将所有与CL,j与CR,j有交点的背景网格单元标记为切割网格单元,存入切割单元链表中。此算法的时间复杂度为O(n2)。
1.3 基于切割单元法的评价区域三维网格生成
切平面j内的背景网格完成与端点集CL,j与CR,j的切割后,被分为三类:1) 评价区域内网格;2) 评价区域外网格;3) 边界线切割网格。其中:评价区域外网格作为无用网格需删除;对于边界线切割网格,采用碎片切割单元合并算法将其与相邻切割单元合并。得到两种网格单元后,结合当前切片层层厚信息即得到了第j层三维笛卡尔噪声环评计算网格。分别存储于左侧、右侧评价区域内网格单元链表,左侧、右侧评价区域合并单元链表。4个链表均为双向链表,其数据域由下式描述:
式中:(xi1,yi1,jΔZh),(xi2,yi2,jΔZh),(xi3,yi3,jΔZh),(xi4,yi4,jΔZh),(xi1,yi1,(j+1)ΔZh),(xi2,yi2,(j+1)ΔZh),(xi3,yi3,(j+1)ΔZh),(xi4,yi4,(j+1)ΔZh)为三维笛卡尔网格单元8个节点坐标;(a1,a2,a3,a4,a5,a6,a7,a8)为节点属性,其属性分为边界线段切割交点与背景网格点两类。
2 声屏障路段三维交通噪声环评计算
2.1 声屏障插入衰减量计算
声屏障是降低地面运输噪音的有效措施之一。依据文献[17],安装声屏障前后在某特定位置上的声压级之差为声屏障插入衰减量Abar。
Abar=ΔLd-ΔLd有限-ΔLt-ΔLr-(ΔLS,ΔLG)max
(6)
式中:ΔLd为绕射声衰减;ΔLt为透射声修正量;ΔLr为反射声修正量;ΔLS为障碍物声衰减;ΔLG为地面吸收声衰减;max表示取ΔLS与ΔLG中的最大值。单位均为dB(A)。
本文的研究对象为仅建有单侧声屏障的道路,因此反射声修正量ΔLr为零。
2.2 有限长声屏障绕射声衰减量计算
当声源为无限长声源且声屏障为无限长时,其绕射声衰减由下式计算:
(7)
(8)
式中:f为声波频率,单位为Hz;δ=a+b-d为绕射路径声程差(如图3所示)单位为m;c为声速,单位为m/s。

图3 交通噪声绕射及透射路径
当声源为一无限长声源而声屏障为有限长时,其绕射声衰减仍由式(7)、式(8)计算,但需要减去一个修正量,则:
(9)


步骤1 对于声屏障路段声影区内的每一网格节点,若该点处声屏障遮蔽角百分率大于70%,则进入步骤2 。
步骤3 若该线段与9条曲线皆无交点,则该点处的修正量为2 dB(A)。若该线段与一条或多条曲线段有交点,则选取交点序号N最高的曲线为其取值曲线。该点处的修正量为:

计算出绕射声衰减ΔLd后,透射声修正量ΔLt、地面吸收声衰减ΔLG可由文献[17]中的公式计算得到,代入式(6)即得到了声屏障插入衰减量Abar。
得到声屏障衰减量Abar后,采用文献[9]中的算法即可计算得到道路总车流声效等级,单位为dB(A)。
2.3 评价区各分层内声影区与声照区笛卡尔网格生成
对于无声屏障路段、有声屏障路段的评价区域内网格,均需判断哪些为声影区网格,哪些为声照区网格,再依据相应的噪声模型完成计算。对于图3所示声屏障路段,本文提出了基于道路及声屏障几何参数的各分层内声影区与声照区笛卡尔网格生成算法。
步骤1 人机交互输入道路几何参数,包括:路基高度H、路面宽度B、路肩高度h肩、声屏障起始点坐标[(xbs,ybs)、(xbe,ybe)]、声屏障有效高度hb等参数,其等效车道高度为距路面1.2 m。将输入参数存入道路几何参数表中。
步骤2 以声屏障位于沿中心线前进方向右侧为例,计算声屏障造成的声影区长度,沿顺时针方向排列的XOY平面内声屏障影响区域边界线段集由Cb表示:
读取1.3节中生成的右侧评价区域内网格单元链表、右侧评价区域合并单元链表,判断上述两个链表中被Cb包围的网格节点,将其存储于新的声屏障影响区网格链表中。


(10)

对于无声屏障的高路堤及高架路段,基于道路几何参数的各切割平面内路基声影区长度为:
(11)
采用与声屏障路段类似的算法,可生成左侧路基声影区、左侧路基声照区、右侧路基声影区及右侧路基声照区4个网格单元链表。
2.4 三维交通噪声环评计算
评价区内三维交通噪声预测计算由各分层内的二维噪声环评计算组成。对于有声屏障路段,采用了基于分层的评价区三维交通噪声环评算法。
步骤1 人机交互输入环评参数,将参数存入环评参数表中。
步骤2 依次遍历左侧路基声照区、左侧路基声影区、右侧路基声影区、右侧路基声照区、声屏障声影区、声屏障声照区等网格单元链表。


3 可视化显示与实验分析
3.1 噪声等值点追踪与等值线生成
针对GIS系统的特点,对评价区域三维交通噪声环评数据场,本文采用了分层等值线可视化显示。
2.4节生成的三个区域噪声值链表为噪声等值线的绘制提供了数据基础,每个链表均为双向链表,其结点数据域由下式描述:
Si,j={{(xi,j,yi,j,jΔZh),i=1,2,…,n,j=0,1,…,n},a,b,Leq}
式中:(xi,j,yi,j,jΔZh)为网格节点Si,j的坐标;a为网格节点背景属性,分为背景网格点与边界线段切割交点两类;b为网格节点噪声属性,分为路基声影区、路基声照区、声屏障声照区、无线长声屏障声影区、有限长声屏障声影区五类;Leq为Si,j节点处的总车流等效声级。
本文提出了基于分层网格序列法的等值点追踪算法。
步骤1 依次遍历左侧无声屏障评价区域噪声值链表、右侧无声屏障评价区域噪声值链表及单侧声屏障影响区域噪声值链表,对于任一链表中分层高度等于jΔZh(j=0,1,…,n)的所有结点执行下述步骤。
步骤2 按照先X轴后Y轴的顺序遍历,对于每一链表中的结点依照其结点背景属性及相邻节点,构造合并网格单元或背景网格单元。对于节点背景属性a为边界线段切割交点的结点,构造如图4所示合并网格单元。对于节点背景属性a为背景网格点的结点,构造如图5所示正方形背景网格单元。对于每一单元的顶点,比较其Leq值与给定等值线值的大小,Leq值大于等值线值的标记为“+”顶点,反之为“-”顶点,则:1) 只有一个“+”顶点或“-”顶点的单元有两个等值点;2) 有两个“+”顶点与两个“-”顶点的单元,其等值点个数为2个或4个。对于由“+”顶点与“-”顶点共同组成的单元边,采用线性插值计算等值线与该条边的交点,将交点坐标按所属链表存储于GIS系统中的j层左侧评价区等值线TAB表、j层右侧评价区等值线TAB表或j层声屏障影响区等值线TAB表。

图4 合并单元网格等值点追踪

图5 背景单元网格等值点追踪
步骤3 若背景网格单元顶点Leq值分布如图5(d)所示,单元内必有四个等值点,则评价区域内同一个等值线值存在着两条等值线。因此将该单元剖分为四个三角形单元,在四个三角内进行等值点追踪。新增网格中心点处的Leq值为单元四个顶点处Leq的平均值。图6 (a)中心点处为“-”顶点,图6 (b)中心点处为“+”顶点。采用线性插值计算等值线与剖分单元8条边的交点,可得到两组共6个等值点。再通过判断与哪条等值线有共享等值点,将两组等值点的坐标分别存入拥有相同等值线值的两条等值线TAB表中。
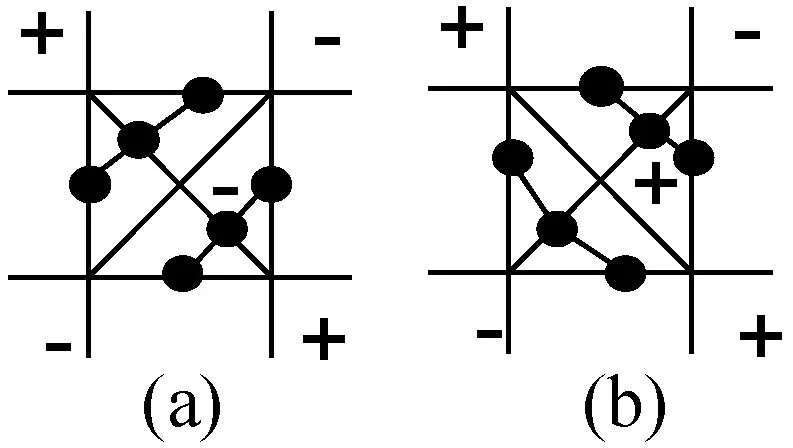
图6 剖分单元等值点追踪
步骤4 重复执行步骤1,直至完成j个平面上的等值点追踪,分别生成左侧评价区等值线TAB表、右侧评价区等值线TAB及或声屏障影响区等值线TAB表三类等值线表。此算法的时间复杂度为O(mn3)。
噪声等值点追踪算法为噪声等值线绘制及等值线拓扑填充提供了基础,采用三次样条函数对存储于三类TAB的等值点数据进行光滑,将求得的插值点坐标存入光滑TAB表中。可视化显示阶段,在GIS系统中创建j个图层,读取与每个图层高度相对应的三类光滑TAB表,并用直线段将插值点依次连接起来即得到了光滑后的等值线。
等值线TAB表中某一等值线值的等值点连接后为评价区域内一条非闭合等值线,将其沿道路边界线段及评价区域边界线段进行封闭后形成等值线区域,判断各条等值线区域的包含与并列关系后可生成等值线拓扑关系二叉树。前序遍历该二叉树得到一个填充序列,按此序列采用不同颜色依次填充各条等值线内的区域即可得到等值线拓扑填充图。
3.2 环评计算结果与实测数据对比分析
为验证系统三维交通噪声环评计算的准确性,将计算结果与交通噪声实际测量数据进行了对比分析。选取京港澳高速一段单侧有声屏障路段为实验道路,测量地点为一栋建设中的高楼,测量处距路基水平距离63 m。为便于通过视频辨识与统计交通流量,监测时间选择为昼间。监测仪器为HT-8352声级计,高度测量采用HT-308激光测距仪,长度测量采用JY-361999测距轮。测量时间为30 min,并同时监测交通流量,然后再进行统计。表1为声屏障路段噪声垂直分布实际监测结果与环评计算结果的比较。表中数据显示:低楼层处计算值高于实际监测值。原因为该路段已建成二十多年,两侧生长的已成林绿化带降噪效果好于初建成的高速公路两侧绿化带。高楼层处环评计算值低于实际监测值,原因为监测当天曾有降雨,路面较潮湿导致车辆轮胎噪声增大,路面噪声修正量不为零。
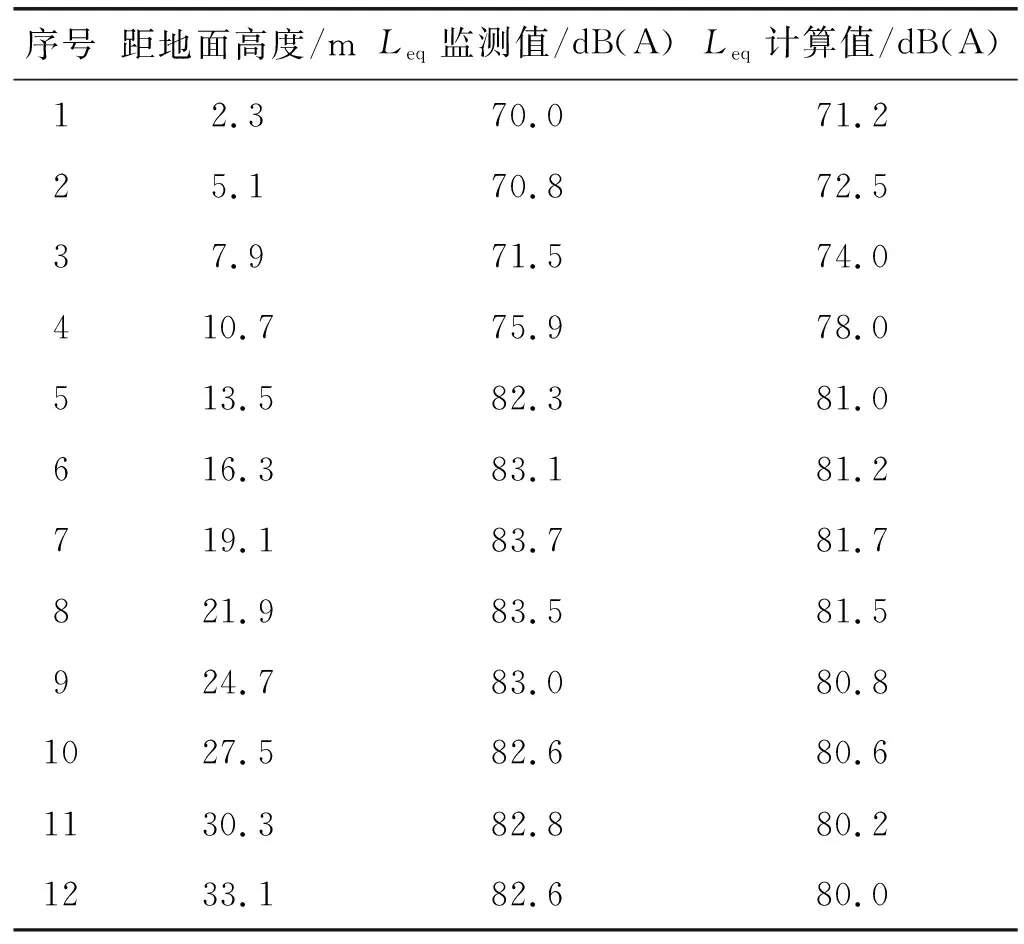
表1 声屏障路段噪声垂直分布监测结果与环评计算结果比较
3.3 噪声环评可视化系统实现
应用本文提出的算法,在MapInfo桌面GIS系统上开发了三维交通噪声屏障路段环评可视化系统,编程语言采用该系统自带的二次开发语言MapBasic。系统流程如图7所示,可视化显示技术路线如图8所示。
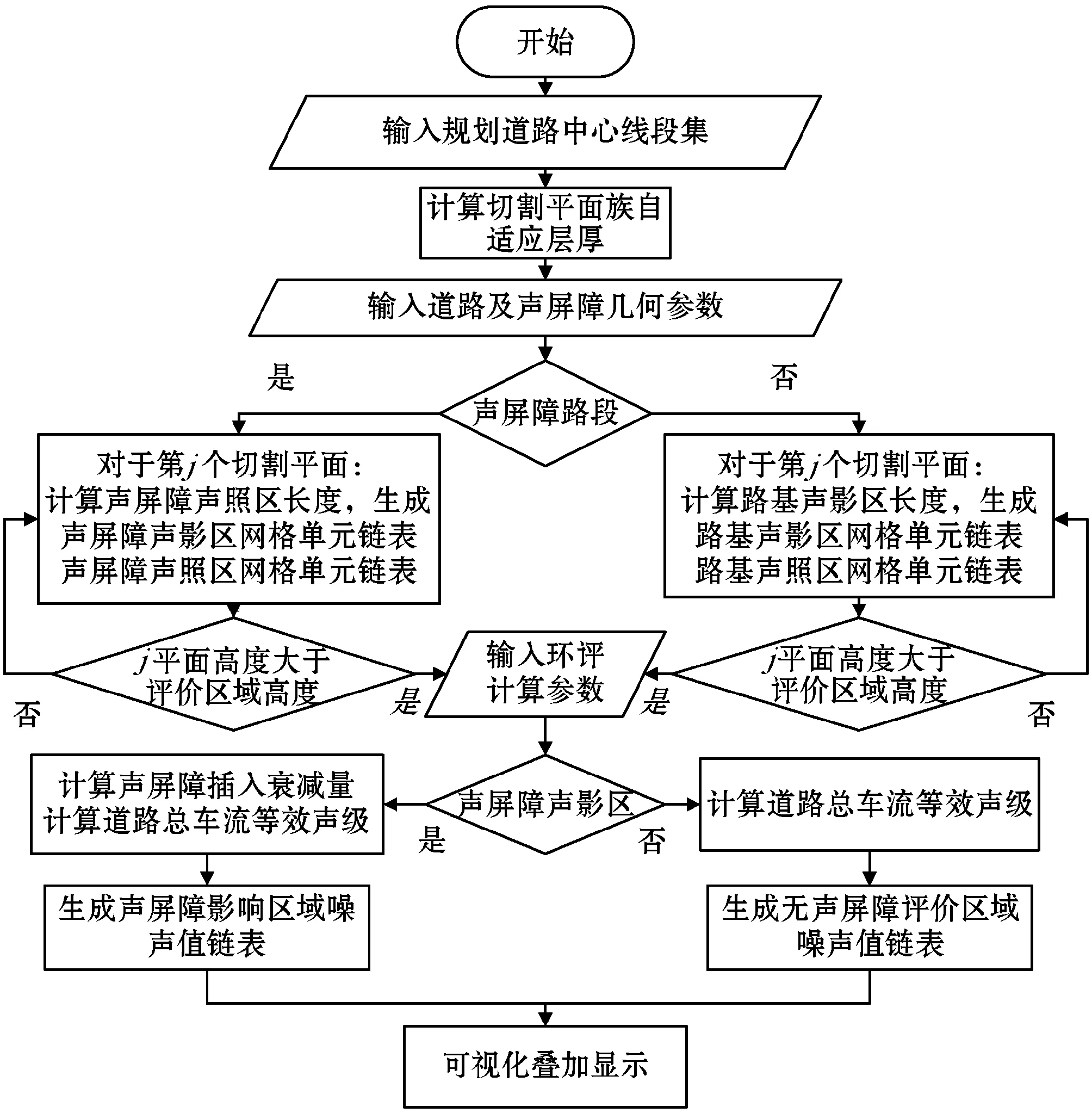
图7 系统流程图
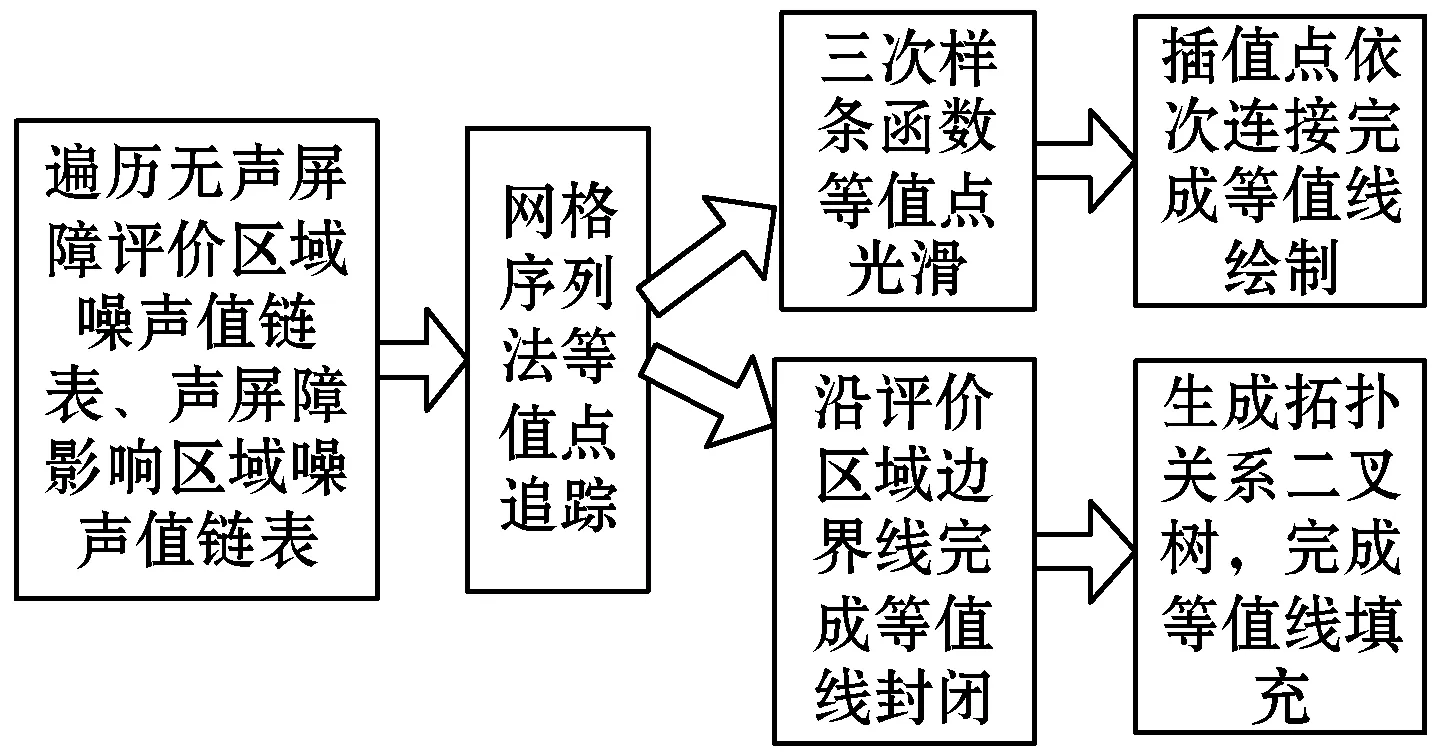
图8 可视化路线图
3.4 可视化实例分析
如图9所示,道路宽度B=60 m,高度H=5.8 m,采用式(3)、式(4)计算水平弯曲系数k及纵坡坡度η后,由式(5)得到切片层厚度ΔZh=3 m,道路前进方向左侧有一座110 kV变电站,周围为非居住区。前进方向右侧为居住区,建有高度为3.6 m的声屏障,此路段为单侧无限长声屏障路段。高度jΔZh=3 m分层内,评价区域边界距道路中心线距离由式(1)计算得D3=283.93 m,各条等值线值由MapInfo系统以信息窗口形式输出,等效声级大于等于70 dB(A)的等值线采用红色绘制(图中以灰度表示),小于70 dB(A)的等值线颜色保持系统默认值。因3 m分层高度小于道路与声屏障高度之和,声屏障一侧评价区域全部为声屏障声影区,等效声级等值线的最大值为69 dB(A),最小值为56 dB(A),符合4a类声环境功能区的环境噪声限值[18]。无声屏障一侧的评价区域,由式(11)可得该侧的路基声影区长度为46.7 m,路基声影区内的等值线最大值为68 dB(A)。垂直距离大于该长度的路基声照区内等值线的最大值为78 dB(A),已超出环境噪声限值。
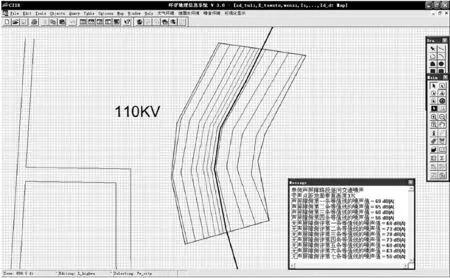
图9 无限长声屏障路段高度3 m分层内噪声等效声级等值线

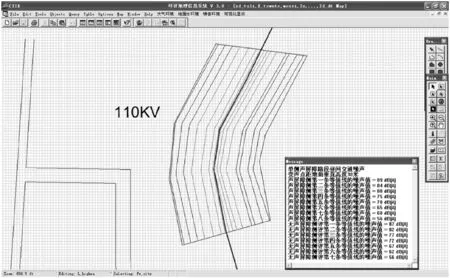
图10 无限长声屏障路段高度30 m分层内噪声等效声级等值线
图11为单侧有限长声屏障路段,该路段为互通立交枢纽,宽度B=80 m,道路高度H=3.8 m,依式(3)-式(5)得到切片层厚度ΔZh=2 m。图中的环境敏感点用五角星标注,声屏障一侧侧评价区域从335 m处开始的主干道及弯道均建有高度为3.6 m的声屏障。高度jΔZh=6 m分层内,评价区域边界距道路中心线距离由式(1)计算得D6=278.65 m,由式(11)可知,评价区域内无声屏障的路段全部为路基声照区,其等效声级等值线最大值为85 dB(A)。因6 m分层高度小于道路与声屏障高度之和,此层内有声屏障的路段全部为声屏障声影区,等值线最大值为70 dB(A)。

图11 有限长声屏障路段高度6 m分层内噪声等效声级等值线
图12为将图11中6条等值线沿边界线段封闭并建立拓扑关系二叉树后,等值线拓扑填充图与背景地图的叠加显示。
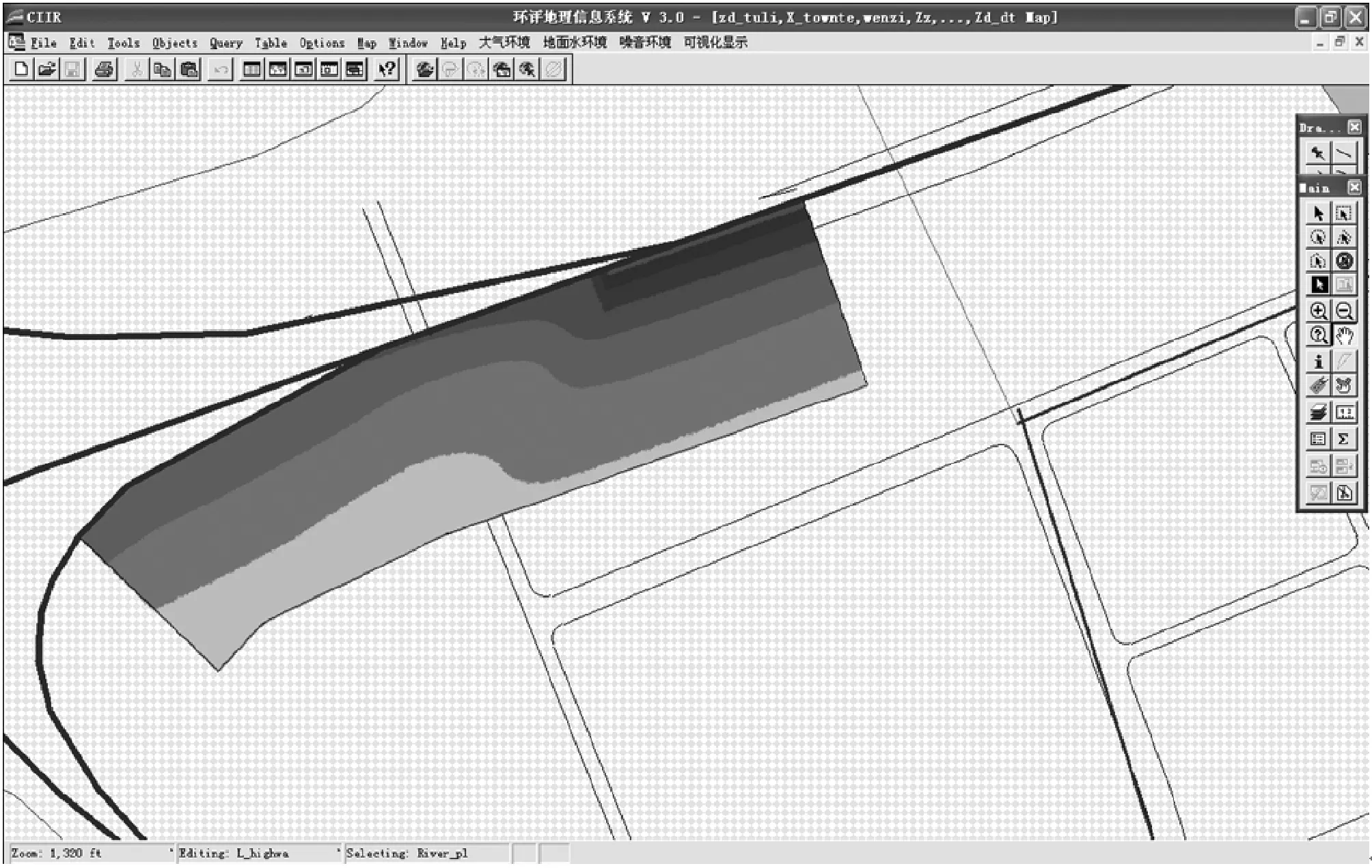
图12 有限长声屏障路段高度6 m分层内等值线拓扑填充图
图13为6 m分层高度内评价区域笛卡尔网格单元节点与背景地图叠加显示,从左至右的网格节点噪声属性b分别为无线长声屏障声影区、有限长声屏障路段声影区及路基声照区共三类网格单元节点,节点间距20 m,采用颜色渐变加以区分。其中有限长声屏障路段声影区网格单元节点的遮蔽角百分率大于70%、小于90%。
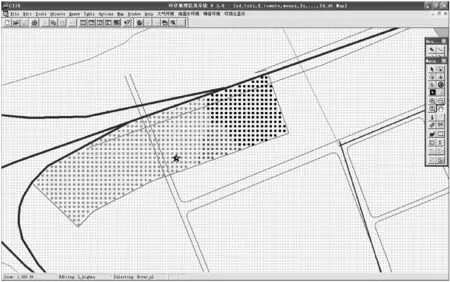
图13 有限长声屏障路段高度6 m分层内计算网格单元节点


图14 有限长声屏障路段高度12 m分层内计算网格单元节点
4 结 语
本文首次实现了基于GIS的声屏障路段三维交通噪声环评可视化。实验结果表明,基于GIS的三维交通噪声环评可视化能够准确直观地反映道路周边评价区域内噪声的空间分布特征,提高了交通噪声环境影响评价的准确性与效率。结合GIS系统独特的空间与属性数据管理功能,对经过医院、学校、住宅等噪声敏感建筑物集中区域的高速公路与城市高架道路两侧声屏障的设计与安装具有非常重要的指导意义。通过对比分析,系统采用的声屏障衰减量计算模型较准确,环评预测计算值与实测噪声值之间的差值在2~4 dB(A)以内。下一步将研究道路两侧已成林绿化带的吸收声衰减以及潮湿沥青路面的噪声修正量。
