基于强跟踪容积卡尔曼滤波的永磁同步电机转子位置估计
2020-05-14李军伟阚辉玉孙宾宾
王 琳,李军伟,马 彦,阚辉玉,孙宾宾,高 松,王 冬
(1.山东理工大学 交通与车辆工程学院,山东 淄博 255000;2.潍柴动力股份有限公司新科技研究院,山东 潍坊 261000;3.北京乾勤科技发展有限公司,北京 100190)
0 引 言
近年来,石油能源的日益减少和环境保护的大力提倡,新能源纯电动汽车逐渐成为当前发展的主要趋势。永磁同步电机(PMSM)由于其本身有较高的能量密度和功率因子、高效节能、结构简单、操作简便等特点,而被大规模应用于新能源汽车等行业领域[1-2]。内置式永磁同步电机(IPMSM)与其他类型的电机相比较,因其更高的功率密度更加适合电动汽车的电驱动系统,但汽车的运行工况复杂,外界扰动突发且多变。因此,当电机位置传感器出现故障时,准确估计出电机的转子位置,确保电动汽车电驱动系统的稳定性是新能源汽车研究的一个重要课题。
内置式永磁同步电机是非线性系统,扩展卡尔曼滤波(EKF)算法是进行电机转子位置估计的主要方法之一[3]。EKF的线性化程度不强,由于永磁同步电机是强非线性系统,从而导致系统的估计精准度不高。在PMSM无传感器控制方法中,基于EKF的转子位置估计算法被众多的相关技术研究者提出并且不断改进[4-6]。Julier等人提出的无迹卡尔曼滤波(UKF)算法提高了EKF的线性化程度和估计精度,通过采样的方法来近似系统的非线性分布,此方法使得滤波精度可以达到二阶以上[7]。UKF算法中采样时选取的参数为定值[8],在高阶系统中容易导致高阶项的误差较大[9],甚至会出现滤波发散。Arasaratnam等人提出了相比于UKF的推理过程更加严谨科学、估计性能更好更稳定的容积卡尔曼滤波(CKF)[10-13],在高阶系统中能够避免UKF算法导致的滤波发散,使其跟踪精度更高。文献[14]对UKF和CKF两种算法进行了比较分析,指出当系统的状态维数大于3维时,CKF算法的估计精度和鲁棒性等性能都要优于UKF。
为了提高IPMSM转子位置的估算性能,本文在传统的CKF算法的研究基础上引入了STF,避免CKF陷入滤波发散,从而动态改善CKF算法对IPMSM转子位置的估计精度和跟踪能力,使电机系统在受到干扰和状态突变时仍然可以快速准确地估计出转子的精准位置。
1 IPMSM无位置传感器矢量控制系统
本研究所采用的STCKF估计算法是基于IPMSM两相静止坐标系模型。图1为IPMSM无传感器的系统结构框图。在传统的PMSM无位置传感器控制系统结构的基础上将CKF和STF相结合,有效避免了因系统干扰、状态突变而产生的估计误差,保证了良好的状态实时跟踪能力。

图1 IPMSM无传感器的系统结构框图
2 基于STCKF的转子位置估计算法
2.1 容积卡尔曼滤波算法
CKF是通过球面-径向规则,对采集的一些样本点经过非线性函数表达式处理后,再进行加权求和来近似非线性高斯系统的状态后验分布,系统状态的均值和协方差由2n个等权值的容积点经过计算得到。在每一个循环计算周期里,主要进行时间更新和量测更新两部分[15]的计算,具体步骤如图2:
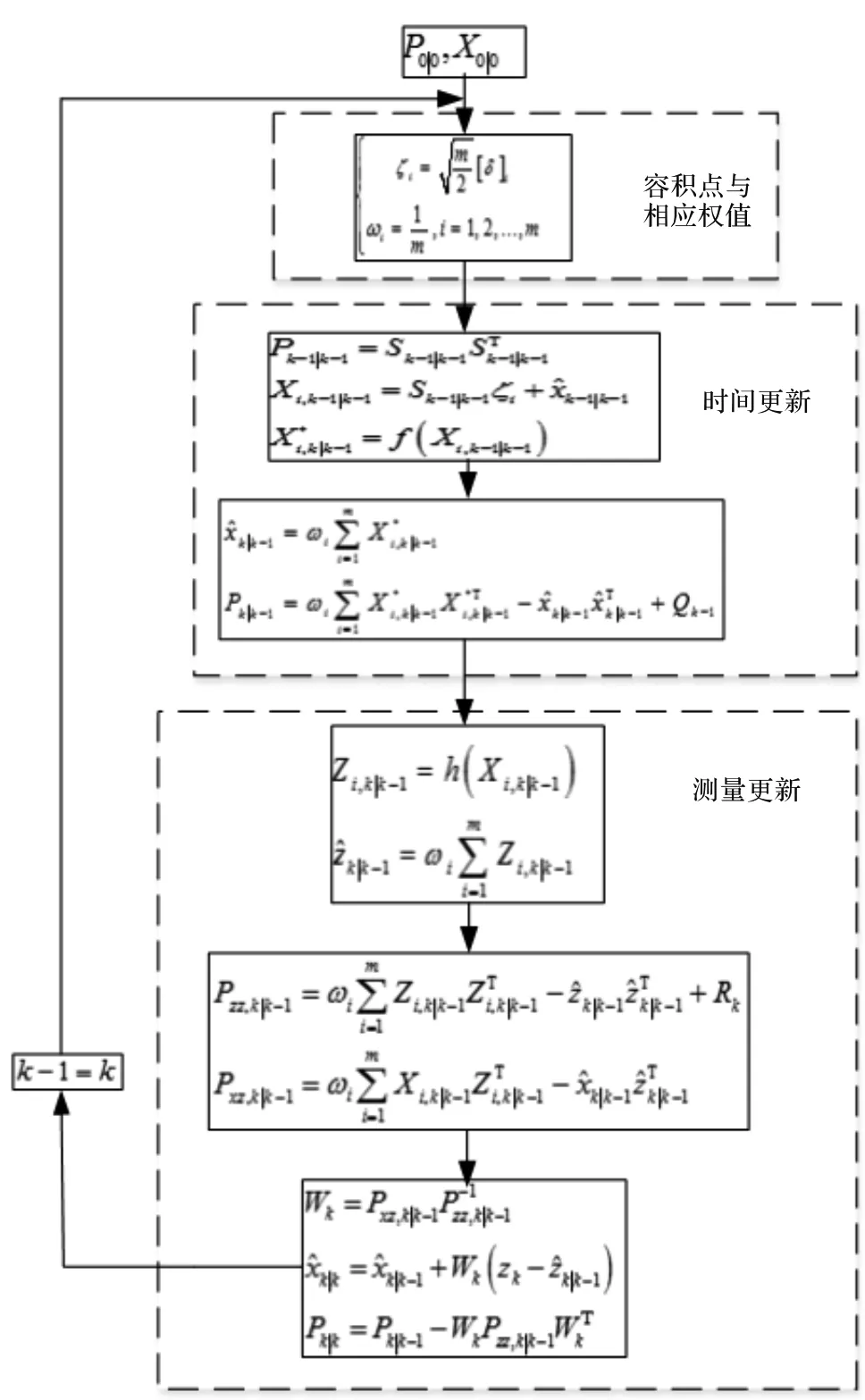
图2 CKF算法流程图
2.2 强跟踪容积卡尔曼滤波算法
CKF算法简单,易于实现且估计精度较高,但当电机受到外界环境的干扰,导致系统参数变化时,容易导致CKF发散。将STF与CKF相结合形成STCKF能够更好的应对系统的状态突变,估计精度和估计的准确性较高,在增加估算稳定性的同时也降低了原本复杂的计算量。STCKF在CKF的基础上,引入了次优渐消因子si,k在线调节Pk|k-1、Pzz,k|k-1和Pxz,k|k-1,进而调整Wk。si,k的表达式由下式给出:
(1)
(2)
状态协方差矩阵需要通过乘以因子Sk来得到新的矩阵表达式:
(3)
输出协方差Pzz,k|k-1和互协方差矩阵Pxz,k|k-1的表达式:
(4)
(5)
其中,Sk=diag(s1,s2,…,sm)。
当si≤1(i=1,2,…,m)时,滤波处于稳态处理,而si>1,滤波可能趋于不稳定。对于si=1的情况,它恶化到标准KF。
2.3 强跟踪容积卡尔曼滤波算法的流程图
图3为用于实现所提出的STCKF的流程图。
3 转子位置估计算法的仿真
为了验证STCKF对转子位置估计的精准度更高,在Matlab/Simulink中分别对传统CKF和STCKF算法进行仿真分析及数据对比。表1为仿真模型中IPMSM采用的参数。
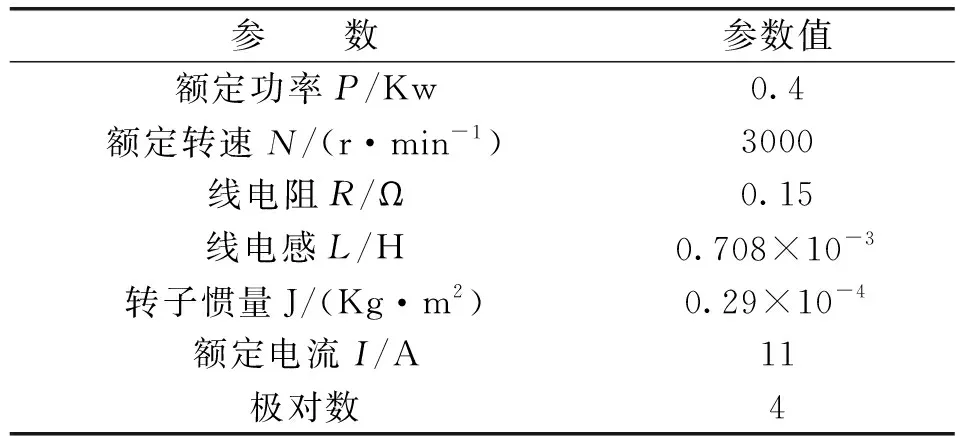
表1 IPMSM参数
图4和图5是传统的CKF和STCKF两种算法估计得到的仿真数据对比图。
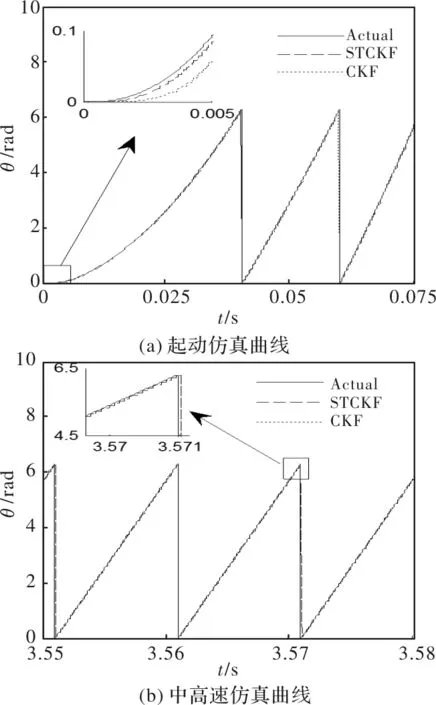
图4 电机实际转子位置与估计的转子位置的仿真曲线
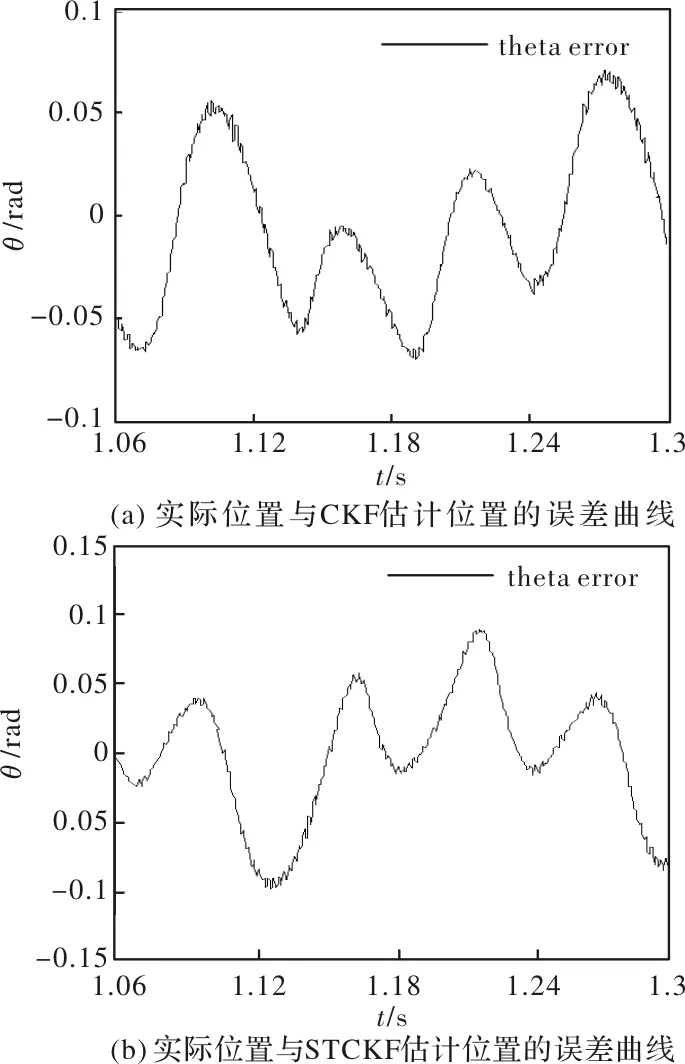
图5 电机转子位置误差的仿真曲线
由图4可以看出,无论是电机工作在起动阶段还是运行于中高速阶段,STCKF估计出的转子位置与传统的CKF算法估计出的转子位置相比,精度都有较大的提高。由图5所示的电机转子位置误差仿真曲线中可以看出,STCKF算法估计得到的转子位置误差要小于传统的CKF算法估计得到的转子位置误差,STCKF的误差波动相较于CKF幅度更小,估计值更加接近于实际的转子位置。因此,两组曲线的对比说明本文中所提出的STCKF算法的转子估计精度要高于传统的CKF算法。
4 转子位置估计方法的试验验证
在第3节的仿真中,明显可以看出CKF算法中引入强跟踪算法降低了转子位置的估计误差,提高了估计的精准度。为了验证仿真中所采用算法的正确性,通过台架实验得到的数据对两种算法进行精度对比。
图6为台架实验装置图。其中,电机控制器的主控芯片为Infineon Aurix TC275,该芯片能够达到1300DMips的峰值性能,为实现STCKF的IPMSM无传感器控制提供了硬件基础;CAN分析仪可以实时地将估算出的转子位置发送到上位机并记录下来;此外,电机中的转子位置传感器可以实时检测出转子位置,以实现实际值与估算值的对比;测功机的上位机可以实现对测功机施加负载扭矩和阻力以改变PMSM的转速。

图6 测试平台
图7为电机起动时和中高速运行时的实际值、传统CKF和STCKF转子位置对比实验图。图8分别为实际值、传统CKF以及STCKF的转子位置误差对比实验图。
由图7的实验曲线可以看出,由于电机起动阶段反电动势的信噪比较低,CKF和STCKF 的估计值与实际值都存在一定程度上的偏差,但改进后的CKF估计效果要优于传统的CKF;由图8的实验曲线可以看出,相比于CKF估计算法,STCKF算法估计出的转子位置更接近于真实值,与实际值的误差范围更小。
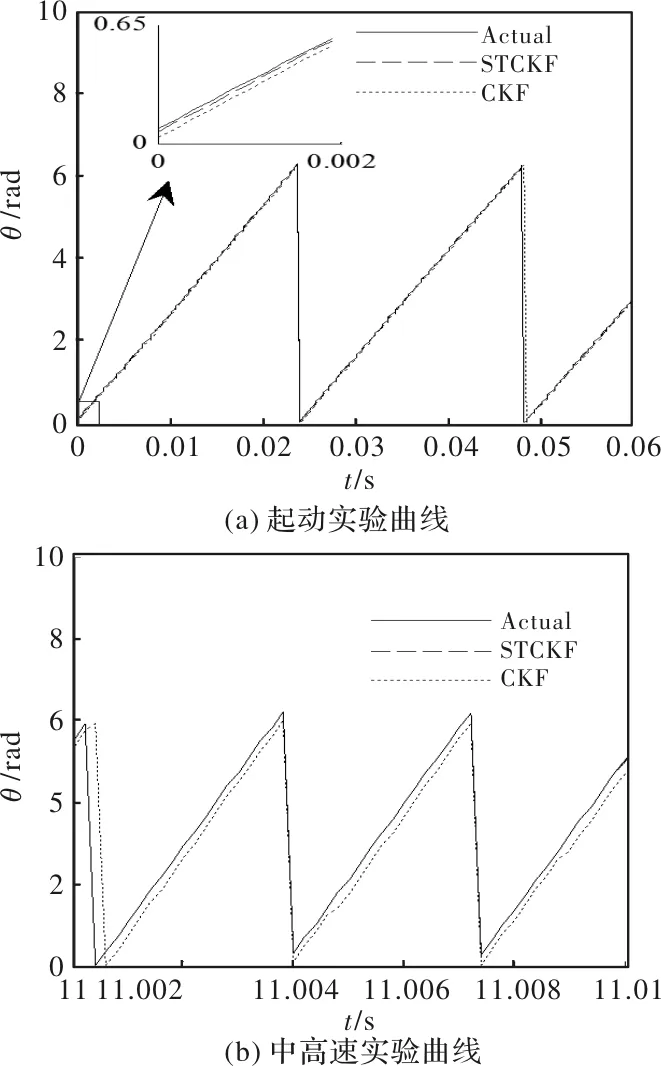
图7 电机实际转子位置与估计的转子位置的实验曲线
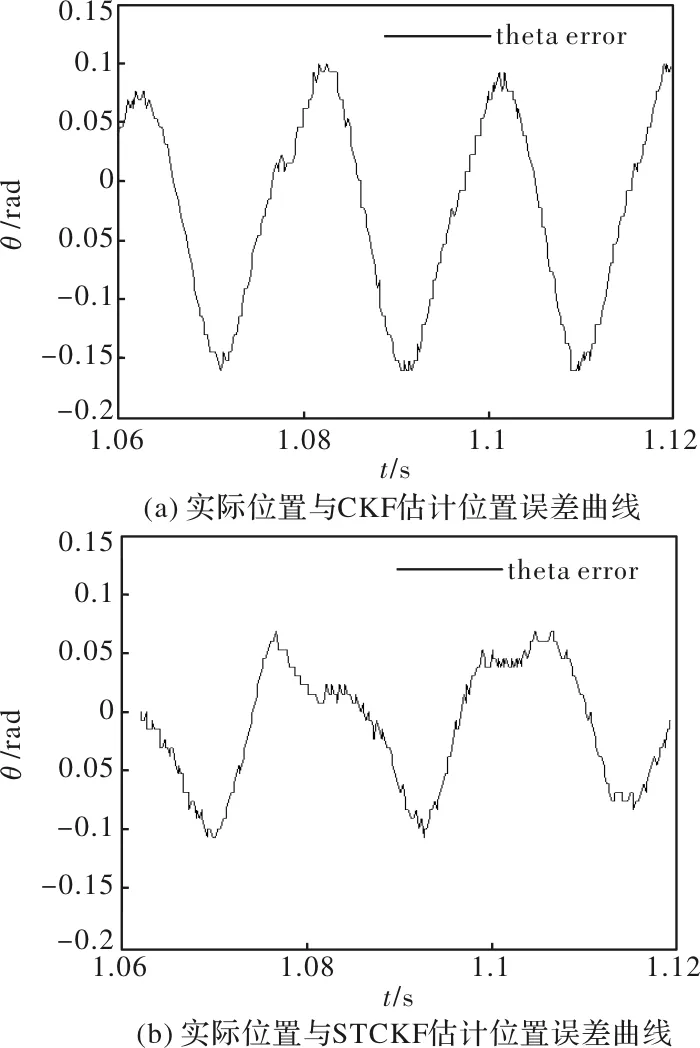
图8 电机转子位置误差实验曲线
通过对实验数据进行整理分析后可得,CKF算法估计的转子位置的误差为5.3°,而改进的CKF算法估计值的误差为4.3°,精度提高了19%左右。在同样的实验条件下可以看出,STCKF算法的估计精度比传统的CKF算法更高,转子位置估计的误差相比之下更小,进一步证明了STCKF算法相对于传统的CKF算法的优势。
5 结 语
本文通过STCKF估计电动汽车电驱动系统中的IPMSM转子位置,通过强跟踪滤波器与容积卡尔曼滤波器的相融合,动态改善算法的估计精度和跟踪能力,干扰和突变对改进后的系统影响程度较小。实验结果表明:STCKF算法与传统的CKF算法相比估计精度提高了19%。