轨道图像中对静态遮挡异物检测算法改进
2020-05-13李学顺

【摘要】针对铁路轨道线路的相互遮挡异物侵限带来的威胁。本文提出使用微型飞行器进行轨道数据图像采集,将数据实时输入到经过训练的Faster RCNN算法网络中进行异物的识别。为了提高检测率,将网络结构OutsideNet加入到Faster RCNN网络算法中。实验结果表明优化后的网络模型对轨道遮挡异物的检测效果更优。
【关键词】异物检测;微型飞行器;Faster RCNN;OutsideNet;IRNN
【中图分类号】TP751.1
【文献标识码】A
关于铁道异物入侵的问题,目前基于机器视觉的研究因其思路简洁[1],检测性能可提升空间大,受到众多学者研究。本文采用了无人机巡航对轨道线路拍摄,同时对拍摄到的图像进行实时处理检测异物。
1、系统设计
研究所采用的数据集是建立在PASCAL-VOC2012数据集基础之上[3],着重对实验所使用到的轨道背景,人,石头以及狗的种类进行训练。
实验建立在深层网络结构VGGNet环境下,修改Prototxt中与类别数目有关的值,在修改值时将人,石头,狗以及轨道图像背景四个类别加入进去,然后进行训练。在识别层中对Classes进行修改,修改为本实验所训练的类别,至此,新增的数据集训练完成。
2、算法描述
2.1 Faster RCNN
Faster RCNN可以看作是“RPN+Fast RCNN”,用RPN代替选择性搜索(Selective Search, SS)[2]。而RPN的主要思想就是使用卷积神经网络直接产生候选区域,使用卷积神经网络的本质就是在网络的最后一层采用滑动扫描窗口。
在此算法网络中最重要的是使RPN与Fast RCNN检测网络组合形成共享计算。RPN网络的具体运行过程是使用一个小网络在神经网络最后一层特征图上进行滑动扫描,映射到一个低维向量,然后再经过一个conv+relu层,得到相同维度特征,最后进行分类和候选框调整。
2.2 OutsideNet
Outside Net是指在ROI(感兴趣区域)区域外[4],也就是检测分析候选框周围的上下文信息,通過添加RNNs实现上下文的信息提取,通过Outside Net可以对遮挡住的目标有比较好的效果。具体为从conv5输出的feature maps通过一个1*1的卷积层然后输入到IRNN单元中,在IRNN单元中由四个方向的转移运算实现四个方向的信息传播。
以向右探索为例,对于向右的每一个状态,都是相同方式,即当前位置的当前激活值等于左边位置当前激活值乘以一个转移矩阵然后再加上当前位置原来的激活值,再通过RELU,将这个矩阵简化为一个单位阵。同理再对其余三个方向进行信息探索,在得到四个方向的特征图之后,需要把这四个方向的信息进行融合,然后再通过1* 1卷积层再输入到第二个IRNN单元中,重复第一个IRNN的转移运算,所以就可以得到整张图像上的特征图。对于向右信息探索的表现可以用式2.1表示。
3、实验结果及对比
在数据集的训练以及检测之前先对实验环境搭建,本实验采用MATLAB版本实验环境,进行数据集的训练和检测,首先在建立好的环境中进行算法优化之前的实验,具体实验结果如图1所示:
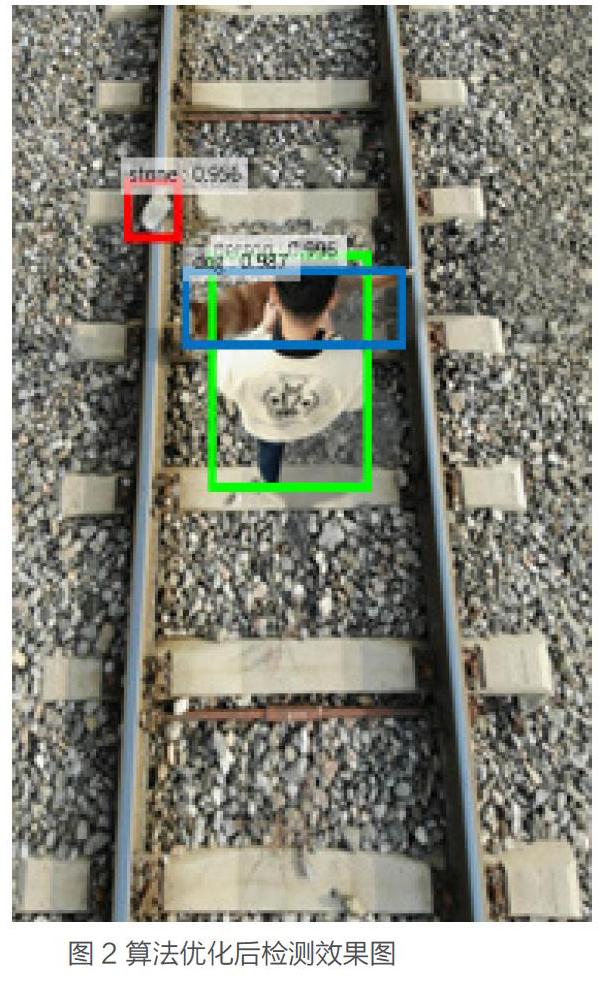
算法优化后的检测结果如图2所示,可得出对被遮挡异物有着较好的检测效果。
结语:
本实验着重对轨道异物入侵中被遮挡异物的检测,首先采用了无人机对轨道图像进行采集,然后在图像处理时,先使用Faster RCNN算法基础上进行实验,之后在原算法上加入具有搜索上下文信息功能的OutsideNet网络结构,从计算出的算法优化前后候选框生成质量以及图像检测结果对比来看,本文方法对被遮挡异物的检测有着较优的效果。
参考文献:
[1]宋晓芳,赵凡.基于卷积神经网络与混合高斯的行人重识别[D].西安理工大学,2018.
[2]卫露宁,刘海风.基于全卷积神经网络的人脸检测算法研究[D].浙江大学,2017.
[3]任少卿,孙剑,李斌.基于特征共享的高效物体检测[D].中国科技大学,2016
[4]朱倩倩,刘森,郭维明.基于Faster R-CNN的车牌检测研究[J].汽车工业研究,2019:57-60.
作者简介:
李学顺(1992-)男,硕士研究生,中交一航局安装工程有限公司。
