一种仿人机械臂的动力学建模和固有频率研究
2020-05-13肖骁千里唐怀平孔令钱
肖骁千里, 唐怀平, 王 吉, 孔令钱
(西南交通大学力学与工程学院, 成都 610031)
引 言
自第一台工业机器人问世至今已有60多年。这期间机器人技术从传统的工业制造领域向医疗服务、教育娱乐、勘探勘测、生物工程、救灾救援等领域迅速扩展。适应不同领域需求的机器人系统得到了深入研究和开发。这就对机器人的主要操作部件——机械臂提出了更多方面,更高标准的要求。
在仿人机械臂的应用环境中,人们更需要机械臂具有良好的柔顺性和安全性。对这两方面的要求大于对其位置精度和承载力的要求[1]。这促使研究人员将目光投向了气动肌肉这种基于生物肌肉运动原理设计开发出来的新型驱动器。气动肌肉具有一系列优点[2],在仿人机械臂上的应用可以说具有得天独厚的优势。所以由气动肌肉驱动的仿人机械臂已经成为这一领域的研究热点。
在机械臂设计制造方面,2005年,南京理工大学的卫玉芬设计了气动肌肉柔顺机器人手臂,其腕关节和指关节分别具有2自由度[3]。2011年,浙江理工大学的金英子团队研制了一种7自由度的气动肌肉驱动的仿人机械臂[1]。2013年,赵京等人基于人体工程学对串联方式下的仿人机械臂构型进行了较为系统的梳理研究[4]。2016年,燕山大学的伍齐佳设计研制了气动肌肉和镍钛形状记忆合金丝驱动的仿人机械手臂[5],将智能材料应用于机械臂末端执行器。2017年,南京航空航天大学的葛志尚设计了一种气动肌肉驱动仿人上臂结构,其中创新地考虑了肩胛骨的设计[6]。
在机械臂动力学建模方面,2003年,刘锦阳和洪嘉振建立了柔性多杆机械臂的动力学模型,并考虑了动力刚化效应[7]。2006年,周胜丰和章定国利用混合坐标法建立了空间多杆柔性杆柔性铰机器人的动力学模型,考虑了柔性杆的弯曲、拉伸和扭转变形[8]。2009年,章定国又用拉格朗日递推方法推导了空间多柔性杆、柔性铰机械臂的动力学模型[9]。2011年,王斌锐等综合考虑了关节柔性和杆件柔性进行了刚柔耦合机械臂的建模,但是只考虑了单杆机构[10]。2012年,章定国团队的陈思佳较系统地针对空间多干柔性机械臂进行了动力学研究,考虑了空间机械臂由n个柔性杆和n个柔性铰组成的情况,但只进行建模研究,没有解算[11]。2016年,刘宇佳研究了串联机械臂的柔性多体动力学性能[12],考虑了柔性杆件空心系数和不同关节角度对系统固有特性的影响,但没有考虑奇异位形的极端情况。
国内此方向研究的一大时代背景是我国航天事业的发展。基于柔性多体动力学的数学模型也多考虑长机械臂在航天环境中做大位移运动时的情况。但对于气动肌肉仿人机械臂的低速运动来说,两者之间是存在差异的。而且仿人机械臂杆件质量较小,长度相对较短,因此不能简单认为驱动器质量是可忽略或是集中分布的。其次,已有研究一般将关节柔性铰考虑为线弹性扭簧,但气动肌肉驱动器具有明显的非线弹性。
本文研究的理论价值主要在于考虑驱动器质量分散分布情况,并建立系统的动力学建模。在编程解算时,利用步进方式,近似关节柔性铰为非线弹性扭簧情况下,结构处于奇异位形时,固有频率随关节角度变化的规律。同时在工程价值方面,本文机械臂设计结构和部分参数基于2016年燕山大学横向项目[5],可以为项目研制、改良仿人机械臂提供一定参考。
1 运动学模型
本文采用D-H法对仿人机械臂进行运动学建模。根据机械臂设计,建立坐标系及尺寸简图如图1所示。
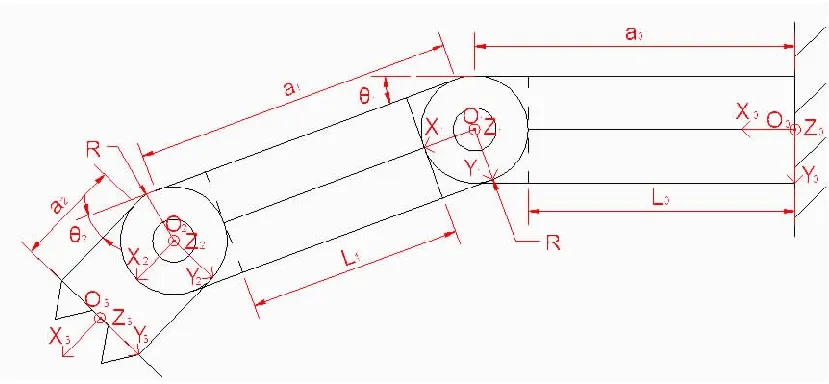
图1 仿人机械臂简图
机械臂肩部固接基座,肘部、腕部各一个转动自由度。分别于肩部基座处,肘部转动关节处,腕部转动关节处和机械臂末端按顺序建立固接坐标系。坐标系O0X0Y0Z0也称基座坐标系。各坐标系Z轴皆垂直纸面向外。手臂转动关节半径为R,杆件长度分别为L0和L1。可以由此列出D-H系数见表1。

表1 机械臂D-H系数
坐标系间齐次变换矩阵如下[13]:
(1)

将D-H系数代入式(1),并连乘相邻齐次变换矩阵,易得坐标系O3X3Y3Z3相对于坐标系O0X0Y0Z0的齐次变换矩阵及旋转矩阵:
(2)
(3)
其中c12=cos(θ1+θ2),s12=sin(θ1+θ2)。
利用MATLAB Robotics Tools验证了计算的正确性,并编译程序绘制出机械臂末端的工作空间。因上臂固接基座,绘制时略去,根据设计令a1=0.3 m,a2=0.03 m,如图2所示。

图2 仿人机械臂工作空间
根据文献[13],易得机械臂末端线速度3v3在基座坐标系下的表达0v3:
(4)


(5)

2 动力学模型
2.1 元件能量说明
如图3及表2所示,机械臂被分为3个部分,共11个元件。其中,关节件和腕部连接件因为相对于杆件和驱动器来说变形微小,故视为刚体。其余所有的元件均考虑了动能,重力势能和弹性势能。
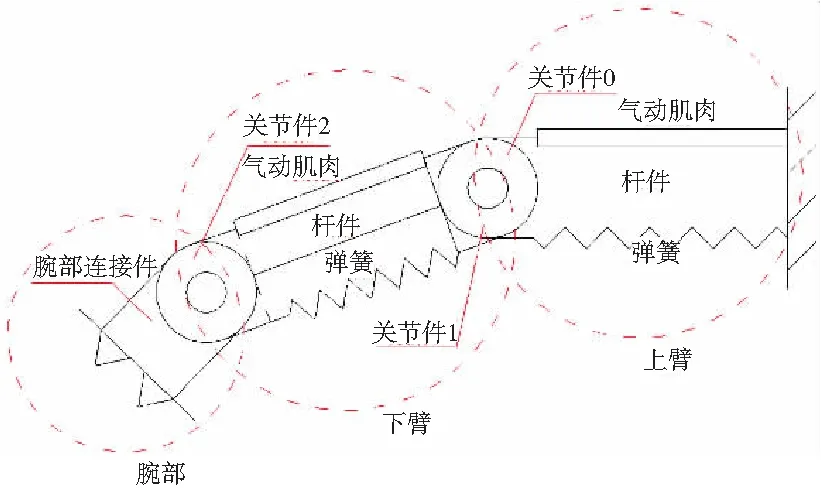
图3 仿人机械臂元件简图

表2 机械臂元件能量
表2中符号右下标g表示杆件,j表示关节,s表示弹簧,m表示气动肌肉,数字表示所在坐标系,或对应关节件序号。右上标区分重力势能和弹性势能。下面进行具体说明。
2.2 动能
图4所示为上臂变形示意图。杆件发生变形时,杆上距离原点x0处的点p移动到了点p'处,存在轴向伸长量w1(x0,t),横向弯曲量w2(x0,t)。r是点p'的位置向量。对r求导可以得到该点的速度:
(6)
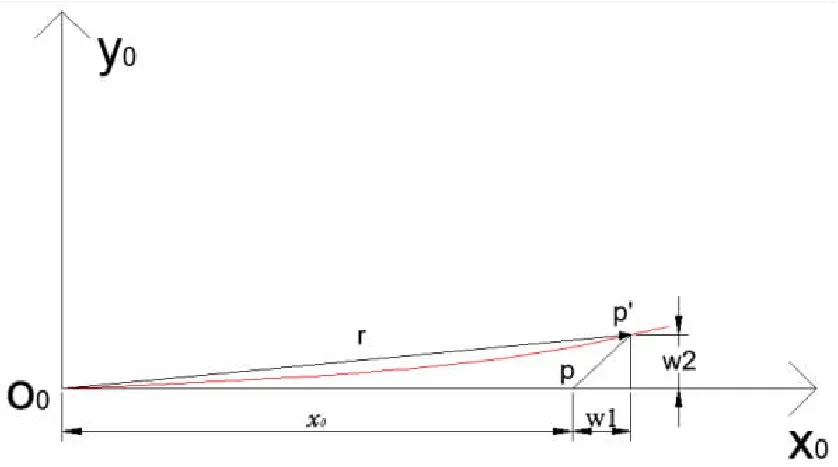
图4 上臂变形示意图
此处根据小变形假设,并考虑仿人手臂的低速运动环境,忽略了横向弯曲引起的轴向缩短量。需要指出的是该速度是在基座坐标系下进行描述的。故上臂杆件动能:
(7)
其中ρ为杆件材料密度,S为杆件横截面积,L0为上臂杆件原长。
经简单推导可得上臂弹簧动能:
(8)
其中弹簧末端速度

因弹簧附着在杆件上,故弹簧有随杆件变形的速度,此处假设弹簧在与杆件相同的x0轴位置,具有相同的变形速度,气动肌肉作出同理假设。
上臂气动肌肉动能:
(9)

(10)

上臂关节动能:
(11)

其余元件的动能推导过程类似,不再赘述,但是需要注意速度在基座坐标系下的描述和叠加。比如下臂关节件1的动能:
(12)

2.3 重力势能
取基座参考系的X0Z0平面为参考平面。由小变形假设,视上臂杆件及关节重力势能视为零。其余元件重力势能可由图5所示的结构几何关系简单推导得出,不再一一列举。
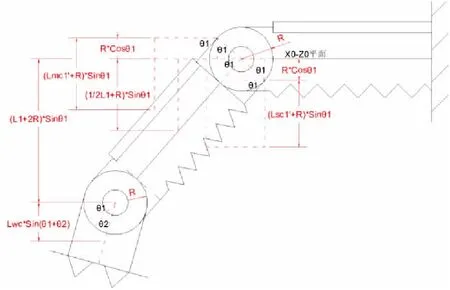
图5 机械臂几何关系简图
2.4 弹性势能及动力学方程
弹性势能方面,上臂杆件弹性势能:
(13)
其中E为杆件材料弹性模量,Iz为杆件的截面惯性矩。
上臂弹簧弹性势能:
(14)
上臂肌肉弹性势能:
(15)
其余元件的弹性势能描述等式类似于上臂元件,不再赘述。
观察式(8)、式(9)、式(14)和式(15)可见,气动肌肉和弹簧组成的单拉驱动器的动能和弹性势能实际上表征了传统柔性关节铰的柔性部分。显然它仍是以关节角度为主要变量来参与到系统能量变化当中,但也更准确地区分了驱动器质量连续分布时各类变形对能量变化的贡献。本文希望研究不同关节角度时系统的自由振动。这种情况下气动肌肉停止充气,故刚度变化也基本停止,所以式(14)和式(15)把气动肌肉近似为了定刚度弹簧进行考虑。实际上随着对气动肌肉力学性能认识的深入,关节弹性势能可以得到更准确的积分形式描述的。
额外的,系统边界上存在能量。整体来看,系统一端固支,一端自由。根据一般边界条件下的欧拉-伯努利梁等效模型[16],固支边界能量:
(16)
其中k0为边界横向位移约束刚度,K0为边界旋转约束刚度。可证明取一个较大数时即可有效模拟固定边界条件。
将系统各元件的动能,势能求和即可得到总动能T和总势能V。采用假设模态法离散化,根据第二类拉格朗日方程:
(17)
易得系统自由振动动力学方程:

(18)
其中M为广义质量阵,G为哥氏项矩阵,K为刚度阵,q为广义坐标。
3 固有频率求解
3.1 标准特征式方程
采用汉密尔顿原理求解系统的自由振动固有频率。可以证明对中心刚体柔性梁结构而言,在低转速情况下,纵向变形对横向弯曲振动的影响极小[11]。故在进行求解计算时,考虑到计算经济性,本文也略去了纵向变形。
横向振动模态函数选用根据一般边界条件下的欧拉-伯努利梁等效模型导出的改进傅里叶级数梁结构振型函数[16]。
(19)
(20)
其中w4(x,t)为下臂杆件横向弯曲变形量,Ajm,Bjn(j=2,4)为待定系数,λjm=mπ/l,λjn=nπ/l,l为广义梁长。当j=2时,l=L0;j=4时l=L1。
自由振动情况下,外部荷载做功为0,于是梁结构的拉格朗日函数为:
L=V-T
(21)
将系统总动能和总势能代入上式并对未知系数求极值:
(22)
(23)
联立式(22)和式(23)可得机械臂振动的标准特征式方程:
(K-ω2M)A=0
(24)
易由此求出系统特征值,即系统固有频率。
3.2 算例验证及收敛性
根据上文理论推导,在Wolfram Mathematica 9中编写了程序。首先代入算例1与文献[17]结果进行对比,验证理论推导和计算程序的正确性。

可见在截断值取10时,程序计算结果已经能较好匹配文献结果,实际上随着截断值取更大,第10阶频率的相对误差也会进一步缩小。这是需要进一步说明的结果收敛性问题。利用基础参数更完整的算例2,来验证计算结果的收敛性。
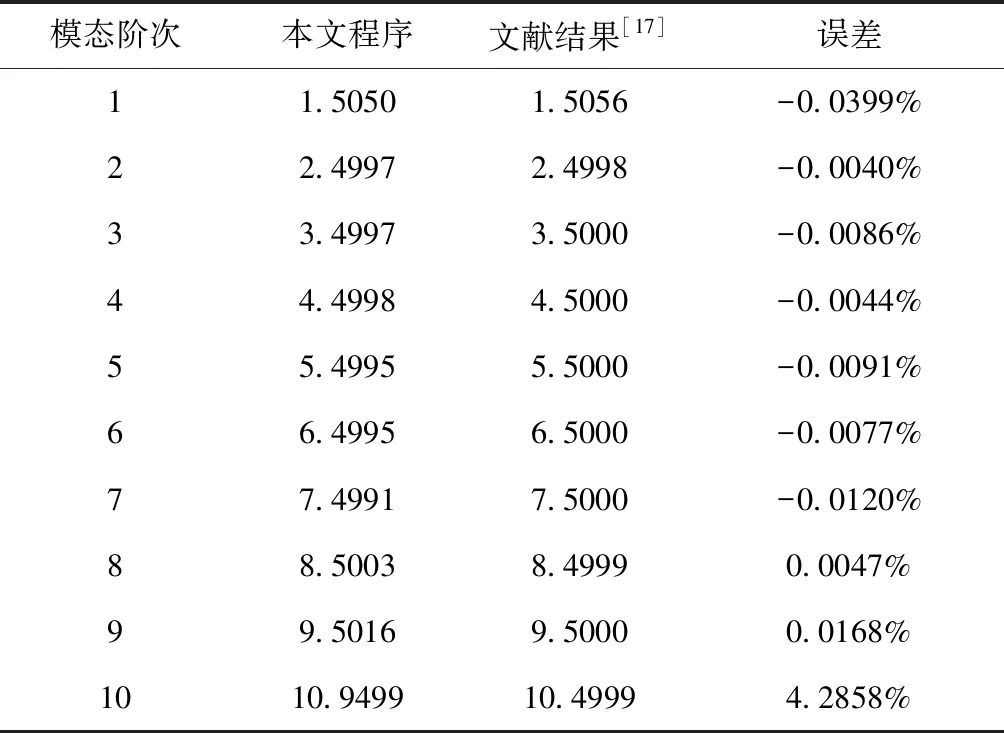
表3 算例1前10阶固有频率

计算结果见表4。

表4 算例2不同截断值前6阶固有频率
可见各阶频率收敛性明显。在截断值取6时,系统前6阶固有频率就已经基本收敛。随着截断值增大,计算过程中的累积误差有所增大,导致低阶频率计算结果出现小幅波动,同时计算时间也大幅增加。为平衡计算的经济性和精确性,后文取截断值为6进行计算。
3.3 固有频率随关节角度变化
仿人机械臂关节角度变化运动实际上是由气动肌肉充放气,引起肌肉刚度变化,同时改变肌肉长度,进而改变关节力矩造成的。其刚度和气压的变化关系是一个非线性变化的函数,而并非某一定值。但由于气动肌肉本身力学特性不是本文研究重点,这里简单假设其刚度随气压增大、肌肉收缩而线性增大。
设置时间步由1到11,km0由8×103N/m到1×104N/m线性变化,步长200 N/m,同时θ1由0.5π到0线性变化,步长0.05 π。km1=5×103N/m,θ2=0不变,保持奇异位形。其余模型参数沿用算例2。各阶频率随角度变化结果如图6所示。

图6 机械臂前六阶固有频率随时间步变化
由图可见,在上述运动过程中,算例2机械臂自由振动一阶频率振荡增大,二阶频率变化近似线性降低,三到六阶变化规律逐渐呈现明显的三角函数特征。
4 结 论
本文通过理论推导和数值计算分析,主要得到以下研究结果:
(1)针对一种气动肌肉单拉关节驱动的平面两转动关节仿人机械臂,采用能量法建立了动力学方程。着重解决了驱动器质量不可忽略且连续分布情况下机械臂关节处的能量耦合方式。可以为类似构造的仿人机械臂动力学研究提供一定参考。
(2)根据理论推导,编程解算了仿人机械臂的固有频率。利用步进方式,近似了关节柔性铰为非线弹性扭簧情况下,结构固有频率在两个关键奇异位形间随关节角度变化的规律。
(3)一个主要待解决的问题是关节为多转动自由度的情况。难点是关节变为一个并联平台,要考虑多对驱动器共同作用下,关节的运动及能量耦合方式。