Tall Buildings with Dynamic Facade Under Winds
2020-05-11FeiDingAhsanKareem
Fei Ding, Ahsan Kareem
NatHaz Modeling Laboratory, University of Notre Dame, Notre Dame, IN 46556, USA
Keywords:
Tall buildings
Aerodynamic shape tailoring
Autonomous morphing
Cyber-physical system
Computational design
Surrogate modeling
Machine learning
ABSTRACT Burgeoning growth of tall buildings in urban areas around the world is placing new demands on their performance under winds. This involves selection of the building form that minimizes wind loads and structural topologies that efficiently transfer loads. Current practice is to search for optimal shapes,but this limits buildings with static or fixed form.Aerodynamic shape tailoring that consists of modifying the external form of the building has shown great promise in reducing wind loads and associated structural motions as reflected in the design of Taipei 101 and Burj Khalifa. In these buildings, corner modifications of the cross-section and tapering along the height are introduced. An appealing alternative is to design a building that can adapt its form to the changing complex wind environment in urban areas with clusters of tall buildings, i.e., by implementing a dynamic facade. To leap beyond the static shape optimization,autonomous dynamic morphing of the building shape is advanced in this study,which is implemented through a cyber-physical system that fuses together sensing, computing, actuating, and engineering informatics. This approach will permit a building to intelligently morph its profile to minimize the source of dynamic wind load excitation,and holds the promise of revolutionizing tall buildings from conventional static to dynamic facades by taking advantage of the burgeoning advances in computational design.
1. Introduction
Worldwide urbanization is resulting in shifting population to densely populated urban centers. This is leading to a burgeoning growth of tall buildings that are exposed to severe weather with potentially disproportionate impact. In particular, these slender structures are highly sensitive and susceptible to wind-induced motion.In the design of tall buildings,structural engineers are facing the challenge of striving for the most efficient and economical design solutions while ensuring structural safety,serviceability for intended function, and habitability for occupants over its design life-time. In response to the needs addressed above, significant research progress has been made in the mitigation of windinduced motion of tall buildings through aerodynamic sculpting,adding auxiliary damping devices, or selecting an efficient structural system with the addition of belt trusses, outrigger trusses,or super columns [1]. Among all these strategies, aerodynamic shape tailoring that consists of modifying the external envelope of the building in order to mitigate the intensity of the governing wind loads has shown most promise as has been reflected in the real-world building design including Taipei 101 [2], Burj Khalifa[3], and other buildings.
Current practice of aerodynamic shape tailoring involves selecting the best performing geometric profile from a limited set of candidate building forms by carrying out wind tunnel tests to assess their aerodynamic performance.Now with the advances in computational fields, computational design has emerged as a powerful design paradigm in the context of the design of structures. Compared to conventional design practice that relies on costly and often time-consuming wind tunnel experiments,the development of a computational platform for aerodynamic shape tailoring has the promise of delivering cost-effective and aesthetically appealing design while allowing thorough exploration of the aerodynamic design space. Within the past few years, fundamental studies for developing an efficient shape optimization framework for tall buildings have been successfully carried out [4-6], in which computational fluid dynamics(CFD)fused with machine learning techniques has allowed to capture the beneficial effects of geometric modifications at the early stage in the design process.
Urban cities layouts are complex as besides the loads on an isolated building, the buildings generally experience loads caused by urban aerodynamics manifested by surrounding cluster of tall buildings with adverse load effects. For example, when Hurricane Ike passed over downtown Houston in 2008, localized vortical flows were unexpectedly triggered due to the interference effects between two adjacent structures, causing extensive damage to cladding and glass failure [7]. This was found to be a consequence of urban aerodynamics that added loads due to a unique combination of wind orientation and building’s layout that caused these adverse effects. These were not anticipated in the design of these structures. In this regard, the aforementioned aerodynamic shape tailoring only considered at the preliminary design stage may be inadequate in facing the challenge of the unpredictable extreme wind events. Akin to planned morphing wings of an aircraft, the next generation of tall buildings may include structural shapes that can morph according to their surrounding flow environment.Towards building more resilient cities in the future [8], there is a need that tall buildings can actively respond to the changing environmental conditions that have not been experienced or anticipated previously. Empowering buildings with such intelligence is a coveted goal in building smart cities of the future.
Intelligent structures may incorporate sensing, actuating, and signal processing elements to successfully alter the structural form[9]. Inspired by the biomechanics of birds that can manage to morph their profile in flight to enhance aerial locomotion under changing ambient conditions, the future tall buildings can be designed to change their forms in compliance with the changing demands placed by the complex and evolving wind environment in urban areas. Early innovative engineering practice involving intelligent structural systems could be traced back to morphing aircraft wings that was carried out by Wright Brothers. Later this technique has been successively applied to the design of adaptive space or marine structures that can alter their functionality during their service lives, and also to the design of mobile robots to achieve the deployment control for their mechanical structures[10], to name but a few. Rapid developments in material sciences,electrical systems,and computer science disciplines are now driving the cutting-edge design of the intelligent civil structures.As an example of application,the Al-Bahr Towers in Abu Dhabi adopted a dynamic shading system that is capable of autonomously responding to the movement of sun (Fig. 1) [11].
A major challenge that impedes the design of intelligent structures that can actively respond to the dynamic loading conditions such as wind loads is that the morphing system appendage must perform robustly without affecting the stability of the load resisting system. Additional considerations of construction and maintenance costs demanded by the complexity of the design of dynamic facades would add to the challenges to the design of autonomously morphing structures. By minimizing the wind load effects a morphing system would promise in reducing the related cost to the structural system and the envelope of the building. Furthermore,aesthetic attraction brought by the dynamic facade would make these buildings iconic symbols of modern cities and attract tourist attraction on a windy day. In addition, technological challenges remain involving sensing analysis, artificial intelligence (AI) and control theory for efficiently informing the real-time control system of the structure in response to the changing external environment.Although autonomous morphing of civil structures is still in its infancy, our current pilot study could pave the way towards implementing this concept. In this research, a cyber-physical based sensing control and actuation system for autonomous morphing of building facades is developed.
The paper is organized as follows.In Section 2,the aerodynamic shape tailoring strategy using the advances in CFD and machine learning will be first reviewed.Technical issues for designing morphable structures embedded with the sensing and actuating systems and control algorithms are presented in Section 3. To go beyond the static computer-aided design of aerodynamic shape tailoring introduced in Section 2, the cyber-physical design platform is introduced for autonomous morphing of the structure in Section 4. Concluding remarks are given in Section 5.

Fig. 1. Dynamic shading system of the Al-Bahr Towers. Reproduced from Ref. [11]with permission of the Creative Commons Attribution License CC BY 4.0, ©2015.
2. Aerodynamic shape tailoring
Tall buildings and long span bridges when exposed to wind undergo complex interactions in which the external shape of the structure plays an important role in determining the level of resulting loading. Based on the literature, aerodynamic shape tailoring that consists of modifying the external envelope of the building such as corner modifications, tapering, and twisting, has shown great promise in reducing the magnitude of wind loads[1,12-14]. For example, Taipei 101 Tower in its final design stage considered a series of corner modifications to the cross-section including double-recessed corners, which led to a 25% reduction in the base moment due to wind as compared to the original design using a square section [15].
Although current design practice that involves selecting from the limited building profiles through wind tunnel tests is an effective means of delivering feasible shapes, the cost and time needed are high primarily due to the expensive and time-consuming procedure using wind tunnel tests. Moreover, in this approach, a vast portion of the search space for the shape design remains unexplored as limited options are examined in a wind tunnel test. As a result, more conventional configurations are favored over innovative ones [5]. Now with the burgeoning digital revolution and the emergence of pervasive computational design,innovative tools can be envisaged to navigate through the labyrinth of shaping design space which otherwise has been limited to a few selected scenarios that rely on wind tunnel tests.This computational design platform would allow the beneficial effects of geometric modification to be comprehensively assessed during the conceptual design stage. It takes full advantage of a fusion of CFD, stochastics,machine learning, and beyond to accurately assess wind loads on structures and guide their sculpting with quantifiable confidence levels. The following sub-sections provide an overview of the state-of-the-art aerodynamic shape tailoring strategy.
2.1. Formulation of shape optimization
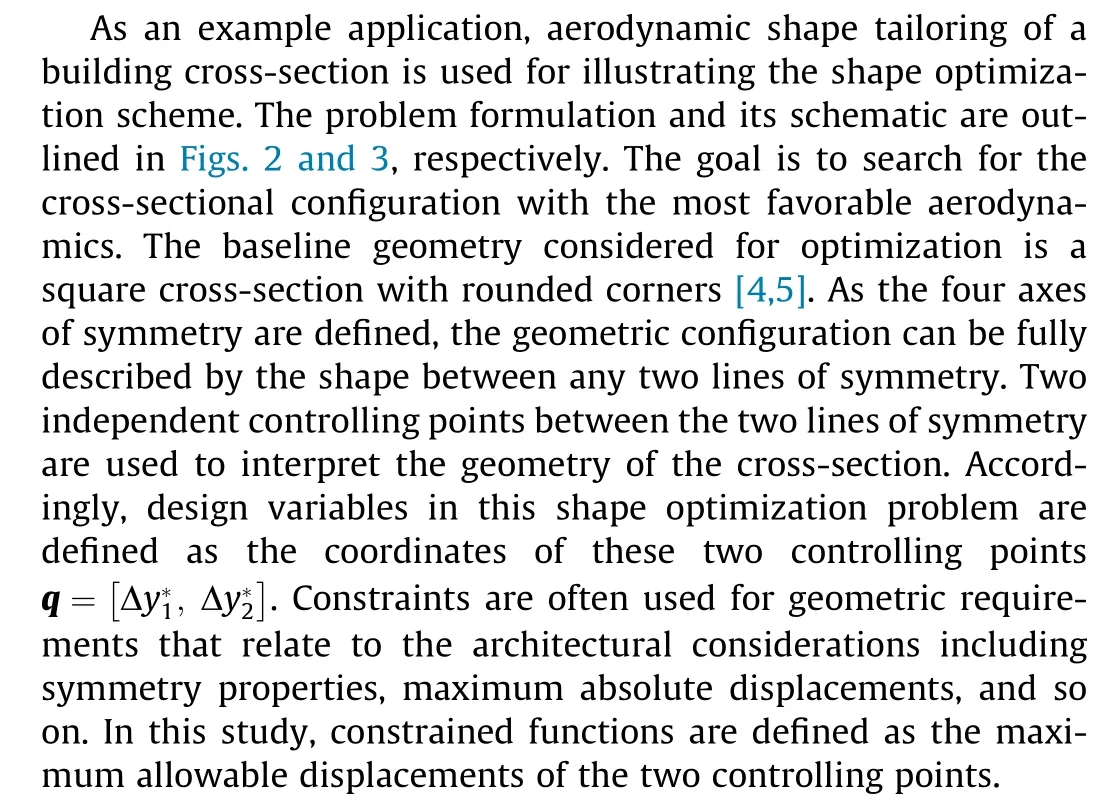
Most buildings present a bluff profile to the wind,which create large regions of separated flow and accompanying unsteady wake region downstream that generates unsteady wind forces in a direction perpendicular to the mean wind. The aerodynamic objective functions are defined as the mean drag coefficient μCdand the standard deviation of the lift perpendicular to the wind, i.e., lift force coefficient σCl. The goal is then explicitly expressed as minimizing these two competing aerodynamic objectives G q( ), which yields the Pareto optimal solutions, or the Pareto front [16].
To allow thorough exploration of the aerodynamic design space,the optimization problem can be solved by applying rigorous optimization algorithms such as genetic algorithms [17]. Nonetheless,the optimization process calls for significant computer resources due to computationally intensive CFD simulations that are required to evaluate the aerodynamic objectives at each optimization cycle, thus significantly compromising the feasibility of computer-aided shape design. To address this issue, surrogate modeling technique is introduced as a computationally inexpensive emulator to mimic the response of the computationally demanding CFD simulator.
2.2. Surrogate-based optimization—Multi-fidelity modeling
In complex engineering design problems involving computationally intensive evaluations, surrogate modeling is a promising tool, which provides a computationally expedient approximation of the original problem.It starts with design of experiments(DoEs)that is to generate sampling points for the calibration of the surrogate model.Popularly used surrogate modeling approaches include polynomial chaos expansions (PCEs), Gaussian process regression,and support vector regression (SVR) [18]. In this study, surrogate models for two aerodynamic objectives are individually calibrated by running a limited number of CFD simulations,and they are used for evaluations of the aerodynamic objectives during the optimization.
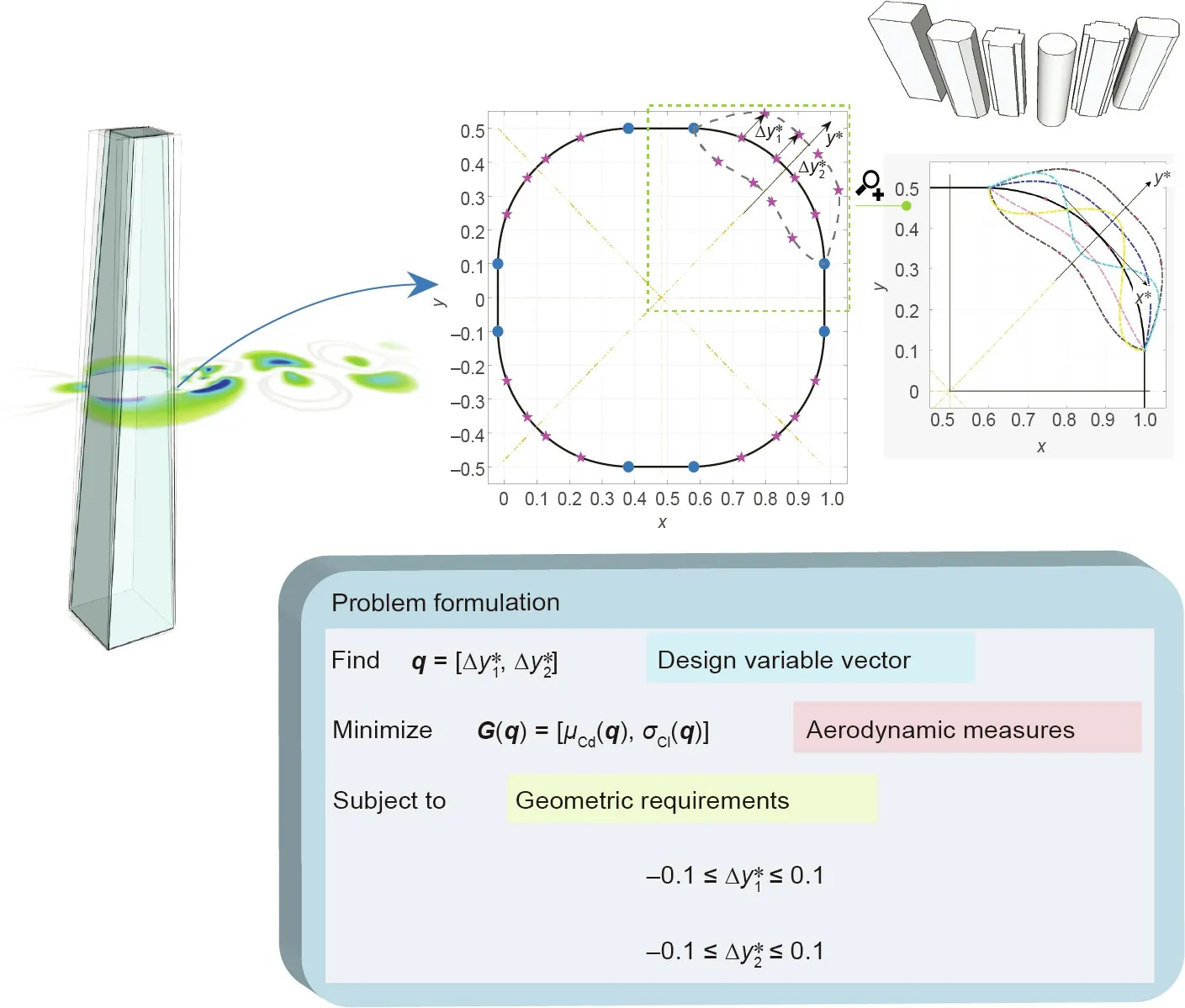
Fig. 2. Formulation of the aerodynamic shape optimization problem.

Fig. 3. Schematic of aerodynamic shape optimization on a computational platform. DoEs: design of experiments.
Observations from CFD models may involve data sources of multiple fidelities with different computational demands. With regard to CFD simulations of the wind flow around bluff bodies at high Reynolds numbers, CFD analyses can be either carried out through low-fidelity simulations, such as Reynolds-averaged Navier-Stokes (RANS), or high-fidelity simulations such as large eddy simulation (LES) [19]. Currently, RANS is the workhorse of CFD while LES is gaining attraction as more computational resources are becoming available [6]. However, RANS model can result in noticeable modeling errors because the unsteadiness of the turbulence is averaged out in Reynolds-averaged approaches[19]. Therefore, it is necessary to blend the information sources from multiple sets of CFD data to enhance the predictive accuracy of the surrogate model while maintaining the computational efficiency. Modern statistical learning techniques such as multifidelity surrogate modeling is a powerful tool for model calibration from multi-fidelity CFD simulations [20] as sketched in Fig. 3.
The multi-fidelity surrogate models is being used here in the optimization phase to provide the computationally tractable estimates of the aerodynamic objectives in the design space.Optimization algorithms guide the search of the optimal geometric configurations with the best aerodynamic performance to inform the building design.The optimal solutions are plotted on the Pareto front, from which a selected one with the blue circle in Fig. 3 represents the cross-section with chamfered corners.As this proposed digital design tool is being developed by testing the concept using a sectional model of the building, it will be further expanded to a full-blown 3D tall building, in which a variety of building forms that vary along the height as well as more refined metrics like the spectra or the peak value may be introduced in the design objectives. Although most slender tall buildings with symmetric structural shape and structural systems do not exhibit torsional response at the level that they become a controlling issue,the consideration of the torsional load effects would also be included in our digital design framework in the future in view that this component of the wind-induced loads could be critical for irregular and complex building configurations.
3. Structures with dynamic facades
As the ambient wind environment is changing in real-time, the aerodynamic shape optimization strategy used during the conceptual and preliminary design stages of the building as introduced in the above section may not be optimal in all conditions.To venture beyond such static shape optimization,autonomous dynamic morphing is advanced in this study. Tall buildings equipped with sensors and innovative actuators could potentially mimic in-flight changes birds undertake to adapt their profile substantially to enhance the aerodynamic performance in a complex wind environment.Possibilities to enable such functions require intelligent systems to manifest control of the building envelope. Design of these intelligent systems involves interdisciplinary backgrounds from material science, computer science and mechatronic engineering.The following will provide a background of such intelligent systems.
3.1. Morphing systems
Morphing systems act as‘‘muscles”to enable buildings to position their profiles into the desired configuration under certain control laws. Intelligent actuation systems can be classified into two categories: innovative structural materials and responsive mechanical systems.
Smart structural materials can provide a biomimetic building surface that senses environmental stimuli and conforms to intended functionality.Therefore,these materials must be embedded with programmable features to allow for the controlled shape changes through the underlying physical properties such as acoustic,electromagnetic,or thermal materials[21].Smart materials can be made of shape memory alloys(SMAs)that deform under variations of temperature due to changes in elasticity, piezoelectric materials that can reconfigure when a voltage is applied, or magnetic materials that undergo shape changes in the magnetic field[22]. There has been a significant amount of research in applying these materials to a variety of engineering disciplines.For example,to morph the aircraft wing, piezoelectrics or SMAs can convert electrical current into the mechanical responses in order to enhance the aerodynamic performance across flight conditions[23]. Fig. 4 shows a full morphing wing that was built by bonding SMAs to the surface of the wing as actuators [24]. Autonomous solar panel arrays that are embedded with the distributed shape memory polymer actuators can achieve self-expansion when the surrounding temperature increases [25]. A building surface that is fabricated with thermobimetal materials is capable of selfshading to maintain the indoor thermal comfort[26].Manufacturing of those smart materials has been revolutionized by advances in three-dimensional (3D) printing, or even four-dimensional(4D)printing of self-assembly programmable materials in building design [27].

Fig.4. US Defense Advanced Research Projects Agency(DARPA)Smart Wing using SMA actuation.Reproduced from Ref.[24] with permission of SAGE Publications,©2004.
Indeed, many efficient designs using smart materials are inspired by nature through gaining insights into the functional surfaces of animals or dynamic mechanisms in plants[28].For example,the shark skin has the capability for the drag reduction when it swims in water as the dermal denticles or skin teeth shaped like small riblets are aligned with the flow to bring the dragreduction benefits[29].Applications of the shark-skin-inspired riblet surfaces include racing swimsuits,boat hulls,and airplanes.An example of biomimicry from plants could be the spruce cones as these can respond to humidity changes in Fig.5(a)[28].Analogous to this concept, the design of a self-shaping architecture named Urbach Tower in Fig. 5(b) utilized moisture change in wood to generate curvatures through shrinking forces [30]. Thematic Pavilion in the Republic of Korea introduced the facade system that can morph into a number of animated patterns [31] as shown in Fig. 6(a). The inspiration to build such the kinetic facade comes from the moving mechanism in the flora world for the pursuit of aesthetics by architects as well for the control of the entry of light.
In the context of responsive mechanical systems, two main groups can be further distinguished based on their kinematics:deformable structures referring to the distributed hingeless structures that can deform in their entirety, and rigidly-linked structures in which the rigid elements are connected by hinges to enable relative motions[32].Deformable structures can be compliant, tensegrity, and pneumatic structures. Compliant structures obviate the use of hinges and are free of backlash, resulting in a smooth shape change and the reduction in stress concentration[32]. As the compliant structures deform under their flexure such as their elastic properties, this type of structures allows for relatively small deformation compared to rigidly-linked structures.Tensegrity structures are composed of members either in pure tension or pure compression for load equilibrium. These structures equipped with actuators can morph their shapes by adjusting their self-stress (stiffening or softening) of the members as shown in Fig. 6(b) [33]. Accordingly, in response to the changes of external loading conditions,the new geometric configuration can be identified through form-finding approaches to efficiently redirect load transmissions [34]. Pneumatic structures can adapt their shapes through air pressure changes, which can be formed in a plethora of shapes. They are lightweight, but have relatively low deployment accuracy. Fig. 6(c) shows Tokyo Dome that falls in the category of pneumatic structures [35].
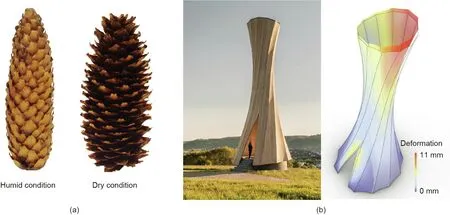
Fig.5. Biomimetic design.(a)Spruce cones with different humidity conditions;(b)a self-shaping timber tower through moisture change.(a)Reproduced from Ref.[28]with permission of Elsevier, ©2017; (b) reproduced from Ref. [30] with the author credit ‘‘ICD/ITKE—University of Stuttgart”.
Fig.6. Real-world applications of morphable structures.(a)Thematic Pavilion;(b)tensegrity structural systems;(c)Tokyo Dome;(d)rigid origami structures.(a)Reproduced from Ref.[31]with permission of SOMA Architects,©2012;(b)reproduced from Ref.[33]with the author credit‘‘Easy K-Kenneth Snelson©Robin Capper via Flickr Licence CC BY-NC 2.0”, ©2018; (c) reproduced from Ref. [35] with permission of GNU Free Documentation License; (d) reproduced from Ref. [40] with permission of the author Dr.Tomohiro Tachi.
Another type of rigidly-linked structures that allows for large deformation and various forms of deployment due to its flexibility includes telescopic structures that progressively change cross-sections, articulated systems with rigid ribs linked with fully-rotated joints,or foldable structures fabricated by folded panels and rotated bars. These systems have been envisaged in the deployment for aircraft, aerospace structures, and civil structures[36,37].
The origami-inspired structures and scissor-like structures have become a source of inspiration for designing deployable structures nowadays.The idea comes from paper folding that is an ancient art form of origami [38]. A foldable origami structure consists of piecewise linear surfaces that are linked with rigid panels and hinges [32]. They can be deployed at different stages with controlled folding patterns to create versatile geometries as presented in Fig. 7 in which foldable tubes are devised [39]. Real-world origami-inspired architectures have been designed such as in Fig. 6(d) [40] which shows the geometry of the origami structure in kinetic motion as well as the deployable facade on Al-Bahr Towers in Fig.1.Although the origami-inspired structures are yet to be fully embraced at the building scale, the current studies have opened the door to unfold their use in altering the exterior shape of civil structures in the future [38].
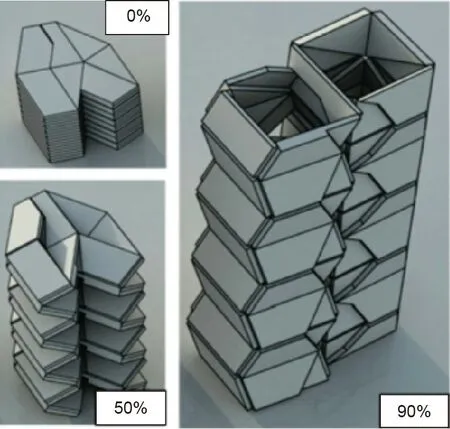
Fig. 7. Shape variations of origami tubes at different stages of deployment.
3.2. Structural control algorithms
In addition to challenges arising from designing reliable morphing actuation systems based on the knowledge from material science and mechanical systems, an autonomously morphing system also faces challenges in the context of control algorithms to send necessary signal for real-time actuation. To successfully implement the design of intelligent structures, a key issue is the control strategies that serve as the central nervous system. The objective of developing control algorithms is to accurately process the instantaneous inputs from sensing systems and send commands to actuation systems. If the closed-loop control system is employed, the measurements should be collected for feedback control. Briefly speaking, the major components in the control algorithms could include model prediction, feedback control, and reinforcement learning.
In the context of model prediction, optimization algorithms such as genetic algorithms can be applied to forecasting the optimal building configuration by minimizing the cost functions that are associated with any quantities of interest. Nonetheless, the computational time is often too long to process the large-scale optimization problems involving high-dimensional inputs and outputs. To overcome this issue, deep learning (DL) that is composed of multiple processing layers to learn representations of the data is more efficient to solve large-scale problems. This technique is a branch of machine learning methods and has made breakthroughs in image processing, object detection, speech recognition, and many other disciplines owing to its capabilities that can capture the intricate structures of the data, especially in high-dimensional problems [41]. To build multilayer architecture, DL involves forward propagation,computation of the measurement error between the output scores and the desired pattern of scores,as well as backward propagation in which the gradient information is used to update parameters.
Another strategy that can be adopted to enhance the predictive performance of the system is reinforcement learning (RL). The advent of RL agents takes a significant step towards producing fully autonomous systems that can interact with environments to learn optimal behavior [42]. In RL, the system learns how to act when reward or punishment signals are given [43]. For example, RL applied to autonomous driving has enabled to plan the navigation of the vehicle to avoid unwanted situations(punishment)and generate good driving commands(reward)[44].Overall,it is a learning paradigm to learn the optimal mapping from states to actions in order to maximize rewards[45].Deep reinforcement learning that combines DL and RL agents include Deep Q Networks(DQL)which operates on discrete actions and Deep Deterministic Policy Gradient(DDPG)which estimates a deterministic target policy in continuous action spaces[46].These have been used with some successes in robotics where control policies for robots are learned from camera inputs [42], natural language processing, as well as morphing aircraft [45] apart from the aforementioned autonomous driving.
Control feedback methodologies can also be combined with the use of predictive models as they have proven to drastically enhance the system performance. There are some popularly used control feedback methods such as a proportional-integral-derivative(PID) controller, fuzzy control, and model predictive control(MPC) [47]. For instances, PID consists of integral, proportional,and derivative feedback that are based on past,present,and future control error, respectively [47].The balance of these three components is achieved by loop tuning. MPC utilizes an explicit process model to predict the future response of a process by minimizing an objective function which quantifies the difference between the predicted and reference responses. This technique has been used to civil engineering applications such as acceleration feedback control for a wind-excited tall building [48]. Different controllers can be assessed based on their performance, tuning, and ease of use,and so on,in a control system.The feedback control has been widely used in motor drives,automotive and flight control,to name a few.
4. Autonomously morphing structures
As summarized in Section 3.1 that morphing techniques have been applied to esthetic design or shading and ventilation control of a structure, they have not been explored in the form design of structures against dynamic wind loading conditions.In this section,the concept of morphing wind-resistant structures is proposed to permit a building to intelligently morph its profile to curb the sources of dynamic wind load excitations in urban areas with clusters of tall buildings. A cyber-physical system that integrates the computation with physical processes [49] is fully embraced in the networked autonomous morphing of a building’s profile. To empower the building with intelligence that can sense the surrounding wind environment, the building is equipped with distributed sensor network, which would help mimic a sensing building skin. Actuators akin to muscles would allow buildings to position their profiles into the desired shape,for example,a twisted form or corner modifications.Advances in high-performance computing (HPC) and machine learning techniques are being fully utilized to design a computational platform for intelligent sensing,computing, and actuation of the building. Challenges that arise due to technical complexities and safety concerns in autonomous morphing have to be understood. Innovations in civil engineering,computational sciences,and many other disciplines nowadays will aid in full realization of this goal.The proposed cyber-physical system is divided into several key components which will be introduced in the following sub-sections.
4.1. Sensing
The rapid development of sensing technologies has been pushing forward their potential applications to the design of dynamic facades of buildings. This technology is involved in broader topics such as the Internet of Things(IoT)[50]in which objects equipped with sensors and actuators can be interconnected with each other in the digital world and provision of communication by the user is available. IoT has been proposed in many scenarios. For example,in the transportation and logistics domain, the transported goods instrumented with tags and sensors can be kept track of for updating their status[50].The paradigm of IoT can also be deployed into the design of smart city systems,in which data for humidity,temperature, and light of the city, which are collected from the distributed wireless sensing network, can be monitored day and night [51]. In structural engineering, advances in wireless sensing technologies[52]and data acquisition[53]are the key components for structural health monitoring. Data associated with the modal parameters and physical parameters of the structure is collected from the sensing network to perform structural condition assessment and damage detection. In the real-time structural health monitoring of the Burj Khalifa, an IoT based SmartSync system was implemented[54],in which the sensing and data management systems were connected to the backbone of the system via virtual cables and the system could be interrogated and managed remotely. The IoT concept will be employed in the morphing system when scaled to the full-scale application as the management system would rely on the Internet for connectivity and communication among localized modules of sensing, computing, and actuating.
As for the morphing structures, the distributed sensors such as anemometers, strain gauges, and global positioning system (GPS)installed in the building would assist detecting wind speed level,surface pressures, and building responses as shown in Fig. 8. This provides the information on the short-term variations of wind environments. In addition, meteorological data and satellite images accessed online can serve as a supplementary knowledge source to guide morphing.The information collected from network sensing is used as the input knowledge of the deep neural networks(DNNs)for data analytics.Therefore,fusing sensing information through selecting key features to represent surrounding wind environment and building information is critical to process the morphing phase.
4.2. Actuation
Innovative actuating systems can be employed to morph the building into the desired form in real-time. For example, articulated mechanism or intelligent digital materials such as SMAs embedded with actuators can be attached to the building facade for corner modifications. A morphing structure can also utilize the origami concept to achieve the twisted effects through deployment using controlled folds. The rigidly-linked truss structures enable the building to be morphed into the tapered mode. Fig. 8 provides a sampling of candidate morphing techniques that are promising for this application to facilitate morphing of structures.
实验组的患者确诊为隐匿性肋骨骨折的患者有48例,确诊率为97.96%,对照组患者确诊为隐匿性肋骨骨折的患者有28例,确诊率为57.14%,实验组患者的确诊率明显高于对照组,两组患者的确诊率相比,P<0.05,其差异具有统计学意义。
4.3. Computations
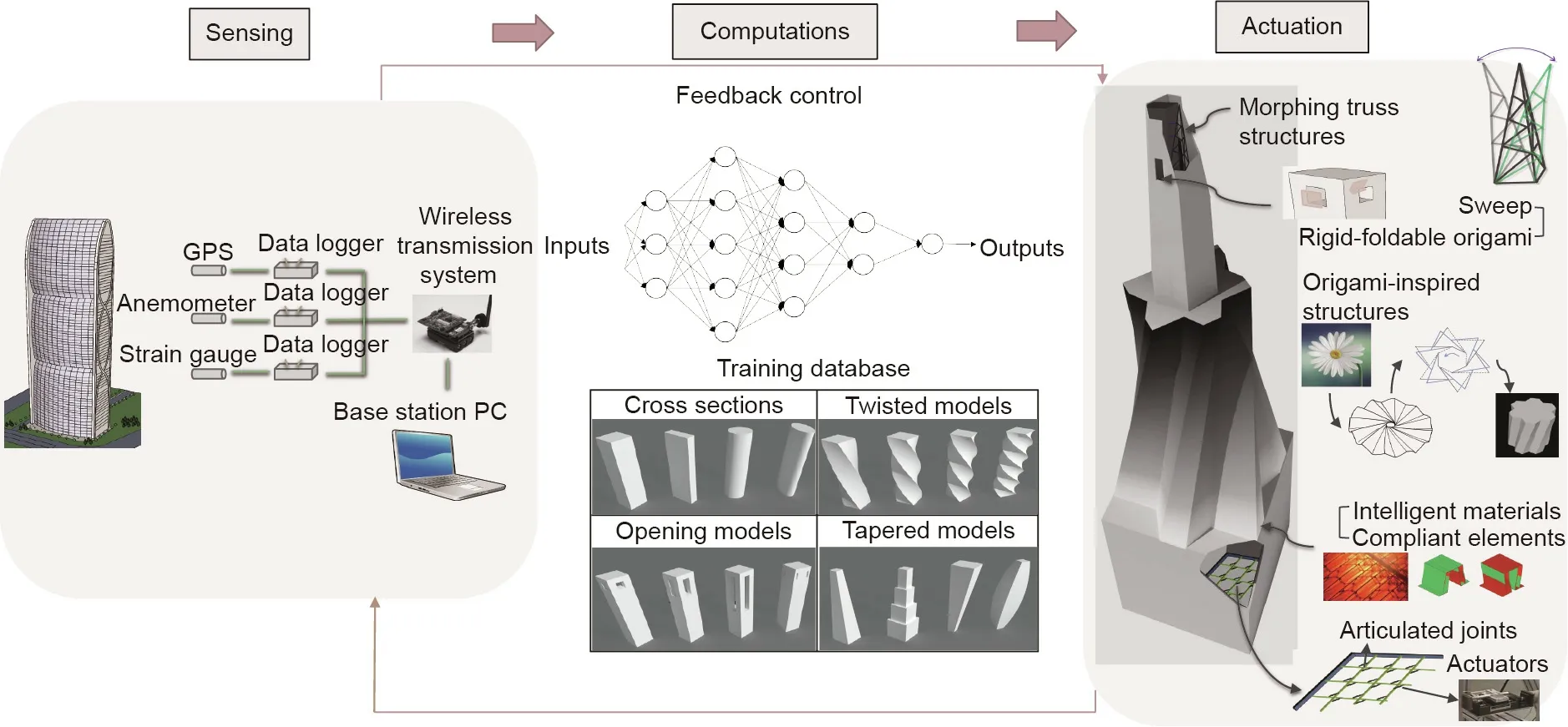
Fig. 8. Cyber-physical sensing control and actuation system. PC: personal computer.
Computational algorithms empower the structure with AI and connect sensing inputs and the eventual actuating outputs.In this study,it mainly involves two components:predictive model that is used to predict the optimal building form at the future time step,and control feedback for closed-loop control. In an attempt to determine the control strategies, RL agents are employed to accomplish the goal of predicting the optimal shape given the data collected from the distributed sensor network. Two components are essentially included in RL: state and action. As shown in Fig.9,an agent or a policy observes a state stfrom an environment at the time-step of t,and generates an action atto interact with the environment at t+1 in order to return the instantaneous reward Rtas feedback. Upon observing sequences of actions, the RL agent is able to learn good and bad behaviors on the long term through optimizing the policy based on those cumulative rewards of each sequence. Therefore, the goal of the RL agent is to maximize the long-term reward function or value function which presents the expected discounted sum of future rewards under a policy π in order to arrive at an optimal performance at each time step.
As for the application of RL in autonomously morphing structures,the state stis defined as the sensing information of the external wind environment, and the optimized action atgenerated by the policy π represents the aerodynamically favorable building form in response to the current state st. For example, if the objective is to minimize the drag coefficient in real-time denoted as Cdt( ), the instantaneous reward function Rtcan be defined as

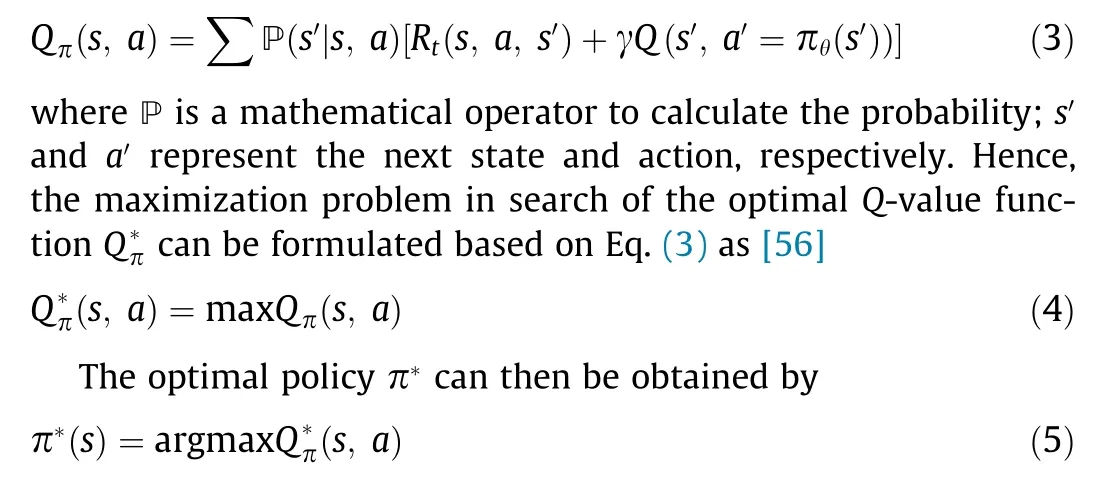
Hence, the corresponding Q-value function Qπ employed in DDPG algorithm can be expressed as the expected discounted sum of future rewards under a specific policy πθby [55]
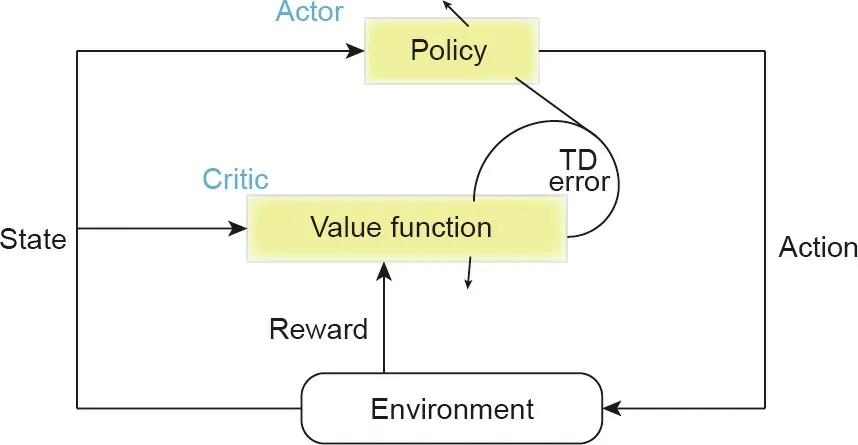
Fig. 9. The actor-critic architecture.

where E is a mathematical operator to calculate expectation;rt=EπRt. γ is a discount factor in time and normally within the range between 0 and 1. s and a represent the current state and action, respectively. Qπs, a( ) needs to be maximized at each time step in terms of the action at. In other words, the optimal building configuration at time t maximizes its value function.
To solve this maximization problem, the value function can be written by its Bellman equation as [56]
To train the RL agent, DDPG as mentioned in Section 3.2 is selected as a RL agent in this study. The rationale behind using DDPG is that the actuation outputs of the dynamic facade of the building can be considered continuous. Therefore, DDPG which can achieve continuous space control is more suitable to be applied to this study. It involves the training of two neural networks: the actor and critic. As seen in Fig. 9, the actor is used to predict the action at the current time step from a continuous action space.The critic estimates the value function of the current state.To train DDPG, the gradient of the value function in the critic can be computed stochastically by Monte Carlo sampling of the trajectories of the flow simulations by constantly morphing the building form at the changing inflow conditions (Fig. 10). The value functions then provide the temporal-difference(TD)error[56]to train the policy.To compensate for prediction errors between the predicted and the real building responses, control feedback is introduced in autonomous morphing. The aerodynamic goals such as aerodynamic forces on the predicted optimal building form are collected at the future time step from sensing network, and the prediction errors are then computed and used to adjust the optimal building form.In this study,we use MPC to achieve the closed-loop control feedback. Fig. 8 provides a schematic of the proposed computational methodologies.
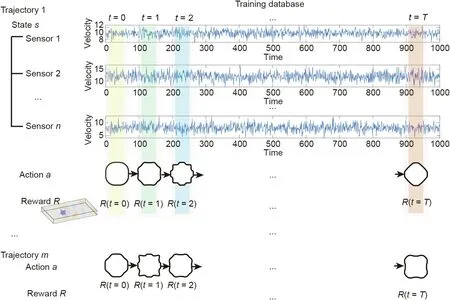
Fig. 10. Framework of the training process.
4.4. Computational mock-up experiment
In this section, the proposed cyber-physical system is mocked on a computational platform to present a proof of the concept advanced in this study. The case of aerodynamic shape tailoring with respect to the cross-sectional shape of the building as illustrated in Section 3 is presented. The autonomous morphing techniques are introduced to allow reconfiguration of the building’s cross-section in real-time to reduce the source of dynamic wind loads.
The goal is to actively minimize the drag force acting on the building through actively morphing the building’s profile akin to a living facade. As for the database to train DDPG, aerodynamic information of a wide range of building forms can be gathered from various fidelities of data source including wind tunnel tests, computational simulations, online datasets, and inputs from crowdsourcing. This collective, multi-fidelity database will serve as the knowledge base to train RL to enable the predictive capabilities of the aerodynamic properties for any building form.In this study,we solely rely on the high-fidelity CFD simulations,i.e.,LES to train the policy concerning the quality of the data. The fusion of lowfidelity simulation data and experimental data will be under investigation in our future work. In Fig. 10, ten epochs were used, in which each contains m = 10 trajectories to compute the expected value of the cumulative reward or the value function. Each trajectory contains 100 sampled simulations (T = 999) to calculate the instantaneous reward function that is formulated in Eq. (1). The discount factor γ is taken as 0.95[57].The optimizer named Adam[58] is used for training both the actor and critic, in which the learning rate is 0.001.It is worth mentioning that the training data involving the total number of epochs is not sufficient enough regarding the fine-tuning of the RL agent and thus obtaining robust predictions of the dynamic building form that offers the best performance. For further refining this proof-of-the-concept work,one may draw upon more published datasets collected from numerical and experimental tests to enrich our training database,through which more promising convergent structures of the neural networks in DDPG and the robust prediction of the actuation outputs can be reached.However,the contribution of the current work is to demonstrate the feasibility of the RL’s application to morph the dynamic facade of the building.
Based on DDPG, the predictive model is cast into two trained DNNs: One is to anticipate the future changes in the drag coefficient, i.e., value function in the critic, followed by the actor that is used to optimize the building’s cross-section at given the gradient information of the value function from the critic. The design space of the actuation outputs provides the allowable displacements of the points that control the external geometry of the building cross-section as shown in Fig.2.The neural networks explore in this continuous actuation space to search for the optimal solution guided by the well-trained policy. As it can be seen in the outputs of the actor-critic approach from Fig.11,the green color outline of the profile shows the optimized geometry with chamfered corners,which is predicted by the RL agent. In addition, to morph into the desired cross-sectional configuration, SMA actuators can be installed to allow the ribs to control their length by way of introduced temperature change.
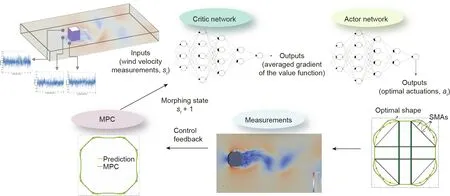
Fig. 11. Schematic of the control algorithm for morphing a building’s cross-section.
The optimized building’s cross-section can be validated through the LES simulation, from which its true drag coefficient can be directly measured. To conduct the closed-loop control, MPC is employed by assigning the task of minimizing the difference between the measured and predicted drag coefficient through further adjusting the cross-sectional shape. The optimal cross-sectional shape after carrying out MPC operation is then updated, which is shown in the green line profile in Fig. 11. This shape configuration is the ultimate output of the proposed control system at one time iteration.The building section is then morphed into the desired facade form guided by the MPC outputs and interacts with its external wind environment to generate the reward function in the sequential time iteration.
With the aid of the proposed computational platform, the preliminary results are obtained for the purpose of validating the autonomous morphing concept. This framework will be further embellished by considering various types of sensing information and higher-dimensional actuation outputs.In view that mobilizing a large-scale mechanical system instantaneously would be challenging and constrained by other environmental issues like water ingress, a sub-assembly of the system involving sensing, control and actuation are planned to physically demonstrate the proofof-the-concept using morphable skin attached to a scaled electromechanical actuation system, in which the effect of the time response for actuating the large-scale morphing system on the computing algorithm will be taken into account.Another challenge in technology is the development of the facade system that can morph while ensuring that the overall building envelope does not permit any water penetration. Distributed morphing technology for managing local or certain levels of the building facade morphing may be more promising to ensure leakage challenge as well as actuation power needed and smaller mass of the facade weight to be shifted.Such local changes in shape can also add to reducing wind load effects through influencing the spatiotemporal coherence of the loading,but their exact contribution needs to be further examined.
Increasing the complexity of the morphing system can include considering multiple aerodynamic objectives such as lift and torsional forces apart from the drag,or adopting more complicated building configurations. This faces challenges by the limited data and also the quality of the published data at the current stage.Nonetheless, the potential and capability of deep reinforcement learning (DRL) to successfully analyze the surrounding wind field and guide autonomous morphing of the building facade are demonstrated through this illustrative example. This study offers a guide to early followers to gradually implement more complexities in building design objectives to be responded to by the morphing system. These would offer pathways to further explore the fusion of sensing and computing, and actuation to the ultimate goal of making it a practical real-world building design and construction practice.It is envisioned that RL would be a powerful tool in future building design practice on the revolution from the static to dynamic facades once the large and high-quality dataset becomes popular and concomitantly available. And we are also committed to sharing our data and computational workflows as open-source in the future, which eventually would enable the RL applications to be fully embraced in civil engineering practice.
5. Concluding remarks
Urban areas are vulnerable to wind-related impact on the performance of tall buildings with attendant economic losses as a result of increasing occurrences of wind events and associated wind load effects. This may be in part associated with climate anomalies and in part due to the enhanced interference effects caused by clustering effect of buildings.With burgeoning advances in computational design, AI, sensing and actuation, and cyberphysical infrastructure, it is the most appropriate time to explore buildings topologies of the future with dynamic facades that actively adapt profiles to counter the effects of changing wind environment. This would enhance building performance in near real-time or as desired under changing wind environment with immediate applications to bridges and other structures. Autonomous morphing of buildings can be conceivably managed through merging with urban sensing and computing networks that currently exist. This paper offers a realizable glimpse of a proposed cyber-physical system to achieve autonomous morphing with the knowledge fusion across urban sensing and data analytics.Results from the computational mock-up provided a proof-ofthe-concept for using DRL and MPC to control the morphing system for the cross-sectional configuration of the building.The initial findings offer enormous potential in using AI agents and modern morphing technologies to mitigate wind-induced effects,thus controlling their impact on the performance and safety of civil infrastructures.
Acknowledgements
This study is supported in part by the US National Science Foundation (CMMI-1562244 and CMMI-1612843), seed grant from the Center for Informatics and Computational Science (CICS) at the University of Notre Dame,the Student Innovation Fellowship from the Thornton Tomasetti Foundation, O. H. Ammann Research Fellowship from the American Society of Civil Engineers, and funds from the Robert M. Moran Professorship.
Compliance with ethics guidelines
Fei Ding and Ahsan Kareem declare that they have no conflict of interest or financial conflicts to disclose.
猜你喜欢
杂志排行
Engineering的其它文章
- Progress of Air Pollution Control in China and Its Challenges and Opportunities in the Ecological Civilization Era
- Near-Zero Air Pollutant Emission Technologies and Applications for Clean Coal-Fired Power
- Hydrogen Power Focus Shifts from Cars to Heavy Vehicles
- Moisture Absorption and Desorption in an Ionomer-Based Encapsulant:A Type of Self-Breathing Encapsulant for CIGS Thin-Film PV Modules
- Deciphering the Origins of P1-Induced Power Losses in Cu(Inx,Ga1-x)Se2(CIGS) Modules Through Hyperspectral Luminescence
- Dedication to Clean Power and Promotion of the Energy Revolution