上肢康复运动的肌肉电信号采集系统*
2020-05-11陈畅明周炫汝谭迎宵黄鸿彪曹东
陈畅明 周炫汝 谭迎宵 黄鸿彪 曹东
上肢康复运动的肌肉电信号采集系统*
陈畅明 周炫汝 谭迎宵 黄鸿彪 曹东
(广州中医药大学医学信息工程学院,广东 广州 510006)
基于脑卒中患者肩部出现不同程度的运动功能障碍,设计上肢康复运动的肌肉电信号采集系统。首先,利用表贴式方法采集八通道的表面肌肉电信号;然后,通过前置电路放大肌肉电信号,并利用右腿驱动技术降低共模;接着,通过低通和高通滤波,进行工频陷波;最后,进行后级放大。实验结果表明:该系统采集肌肉电信号准确率达82%。
上肢康复;肌肉电信号;采集系统
0 引言
随着我国人口老龄化进程的不断加快,脑卒中的发病率呈上升趋势。脑卒中亦称脑中风,是脑部血管发生急性损伤导致的疾病。后遗症主要表现为偏瘫、面瘫、视力障碍和语言表达障碍等,其中偏瘫是最常见症状,这给患者家庭和社会带来了沉重负担。根据临床经验,偏瘫患者发病2年内如果康复措施得当,可较好地恢复。上肢康复医疗器械对偏瘫患者康复起到重要作用,其中肌肉电信号采集是上肢康复医疗器械的关键技术之一。本文对上肢康复运动的肌肉电信号采集系统开展研究。
1 系统设计目的
上肢康复运动的肌肉电信号采集系统应用于上肢康复机器人,主要目的:
1)采集肩部功能正常者完成某一运动任务时肩部主要肌肉的表面肌电(surface electromyography, SEMG)信号,并计算每块肌肉的贡献比,用于评估患者康复训练的准确性和必要性;
2)采集患者完成某一运动任务时患侧肩部主要肌肉的SEMG信号,并提取其特征值(幅值、频率等),用于评估患者康复效果,以便及时调整康复方案,减少康复周期;
3)采集患者健康侧上肢运动时的SEMG信号,基于上肢康复机器人的镜像运动模式功能,实现患侧上肢功能恢复。
2 系统框架
上肢康复运动的肌肉电信号采集系统根据肩关节功能主要采集肱二头肌、肱三头肌、胸大肌、三角肌、小圆肌和斜方肌等肌肉的SEMG信号,主要功能包括信号放大、滤波和抑制共模信号等,整体框架如图1所示。
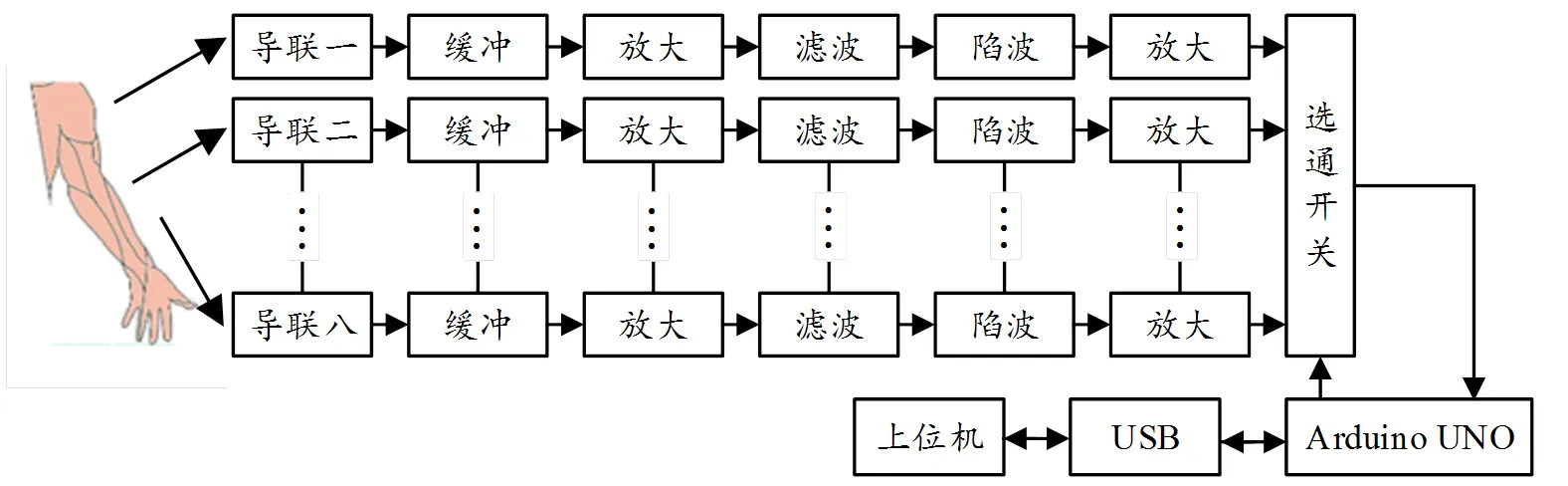
图1 上肢康复运动的肌肉电信号采集系统整体框架
3 硬件设计
SEMG信号的采集方法主要有植入式和表贴式。SEMG信号较微弱,且源阻抗较大。表贴式采集的SEMG信号在0 mV~1.5 mV,频率大都集中在20 Hz~ 100 Hz[1],且具有随机性强、易受干扰等缺点。但相对植入式而言,具有操作简单、成本低、风险低,不会对患者造成痛苦等优点,被广泛使用。为满足便捷、简易和安全无创等需求,本系统采用表贴式采集SEMG信号。
上肢康复运动的肌肉电信号采集系统硬件部分主要包括前置电路、右腿驱动电路、滤波电路、工频陷波电路和后级放大电路,系统硬件组成框架如图2所示。
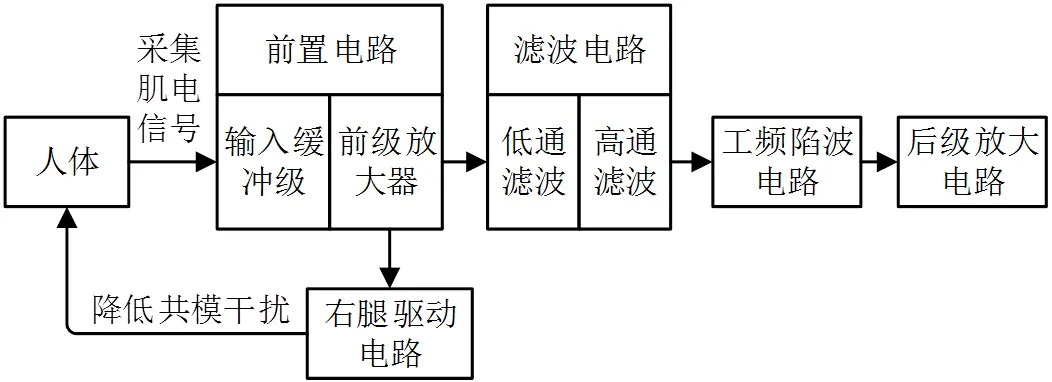
图2 系统硬件组成框架
3.1 前置电路
前置电路主要由输入缓冲级和前级放大器2部分组成。由于各电极与皮肤接触电阻不同,且SEMG信号具有幅值微弱、源阻抗高等特点,因此SEMG信号通过导联线进入前级放大器之前,需先通过输入缓冲级,增加系统的输入阻抗,使信号与放大输入端达到阻抗匹配,以保证肌肉电信号不失真。
SEMG信号通过输入缓冲级后,进入前级放大器。前级放大器是整个电路的核心部分,具有放大信号、抑制共模干扰信号的作用。肌电电极的极化电压是直流偏置电压。在传导过程中,极化电压存在缓慢的漂移现象,并混合在SEMG信号中,同样被前级放大器放大[3]。当输入电压过高,且增益较大时,可能导致输出信号失真。综合考虑,本系统选用具有低输入偏置电流、高输入阻抗、高共模抑制比和噪声低等特点的AD8221芯片,前置电路图如图3所示。
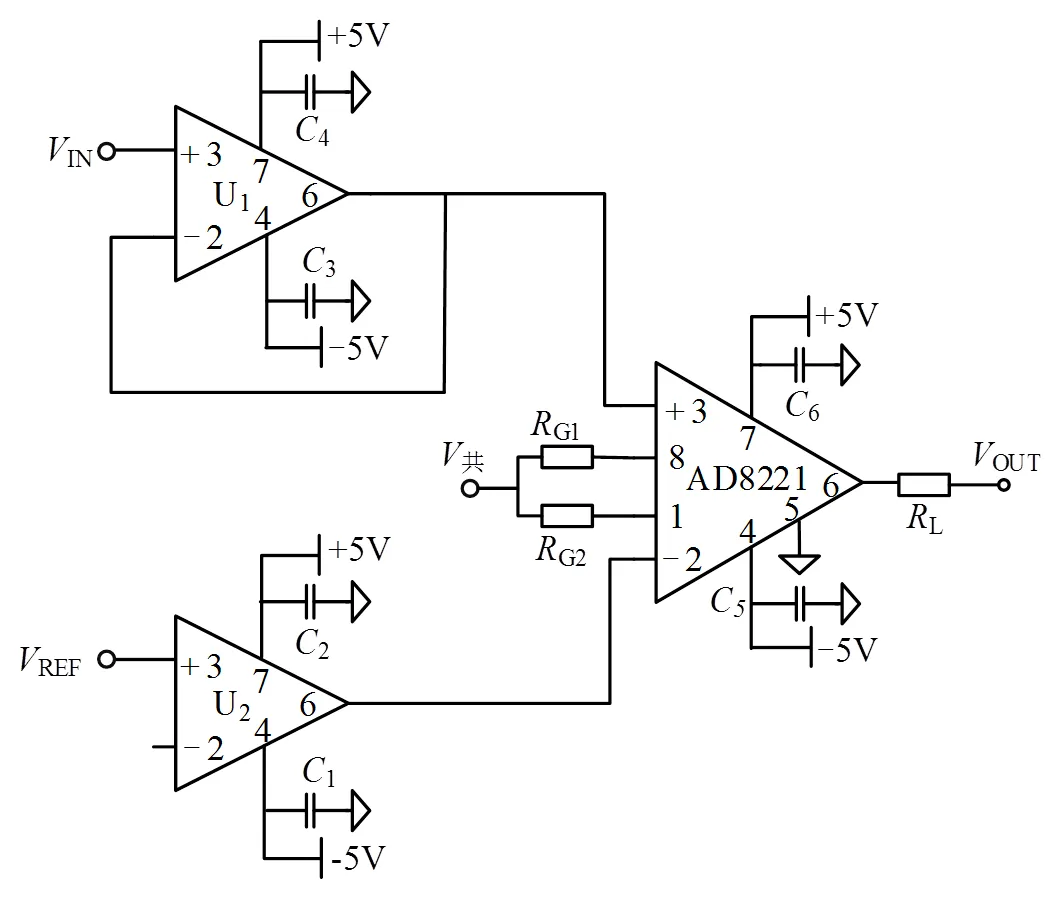
图3 前置电路图
3.2 右腿驱动电路
在上肢康复运动的肌肉电信号采集系统中,前级放大器除了具有放大信号的作用,还需降低共模干扰电压。右腿驱动(driven right leg, DRL)技术是降低共模干扰的方法之一,电路如图4所示。其不仅可以降低50 Hz共模干扰,还可以提高共模抑制比。首先由前置电路中2个相等的偏置电阻G1,G2可得人体的共模电压,该电压经过具有输入缓冲功能的电压跟随器,隔离了2与AD8221,以减小两者间的干扰;然后经过反相放大,作为右腿驱动电路的输出,其中4为限流电阻,防止电流过大对人体造成损伤;最后输出DL。
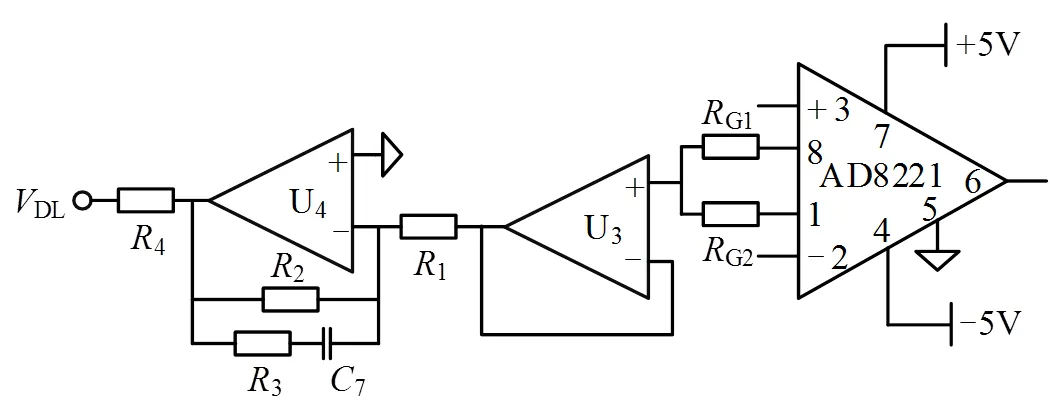
图4 右腿驱动电路图
右腿驱动电路将共模电平反馈给参考电极,并与原来的共模电平极性相反,从而在输入端实现共模信号的抑制,提高整个电路的共模抑制比。本质上,右腿驱动电路图是一个共模电压并联负反馈电路,起到快速放电,有效衰减人体所带共模电压的作用。对DRL电路进行推导,有

式中,共是前置电路的共模输入成分;IN是前置电路输入缓冲级的输入成分;REF是前置电路前级放大器的输入成分;G1,G2是前置电路中2个相等的偏置电阻。
由于单级增益过高,容易造成运放输出产生自激振荡,运放反馈电阻并接反馈电容7和电阻3,起到调整作用。
3.3 滤波电路
SEMG信号主要分布在20 Hz~100 Hz频率范围内,本系统采用二阶压控型高通滤波器滤除低于 10 Hz的低频信号;二阶压控型低通滤波器滤除高于200 Hz的高频信号。
本系统滤波器的上限截止频率为
本文以二阶压控型低通滤波器为例进行介绍,电路如图5所示。该电路在滤波的同时,通过选择适当的R7,R8,可以完成信号放大功能。
3.4 工频陷波电路
在SEMG信号采集过程中,50 Hz工频干扰其主要干扰信号。工频干扰信号是共模信号,通过AD8221时,共模信号被抑制,差模信号被放大,使SEMG信号的信噪比提高。但AD8221的共模抑制比是一个有限值,共模信号通过AD8221后不能完全被抑制,会转化为微弱的差模信号。同时主电极、参考电极与皮肤之间的接触阻抗存在差异,导致共模信号转化为差模信号,该差模信号与工频干扰差模信号混合在SEMG信号中,必须滤除[5]。
综合考虑,本系统工频陷波电路选用UAF42芯片,相比于传统的双T型陷波器,免去了陷波中心频率的调试,如图6所示。
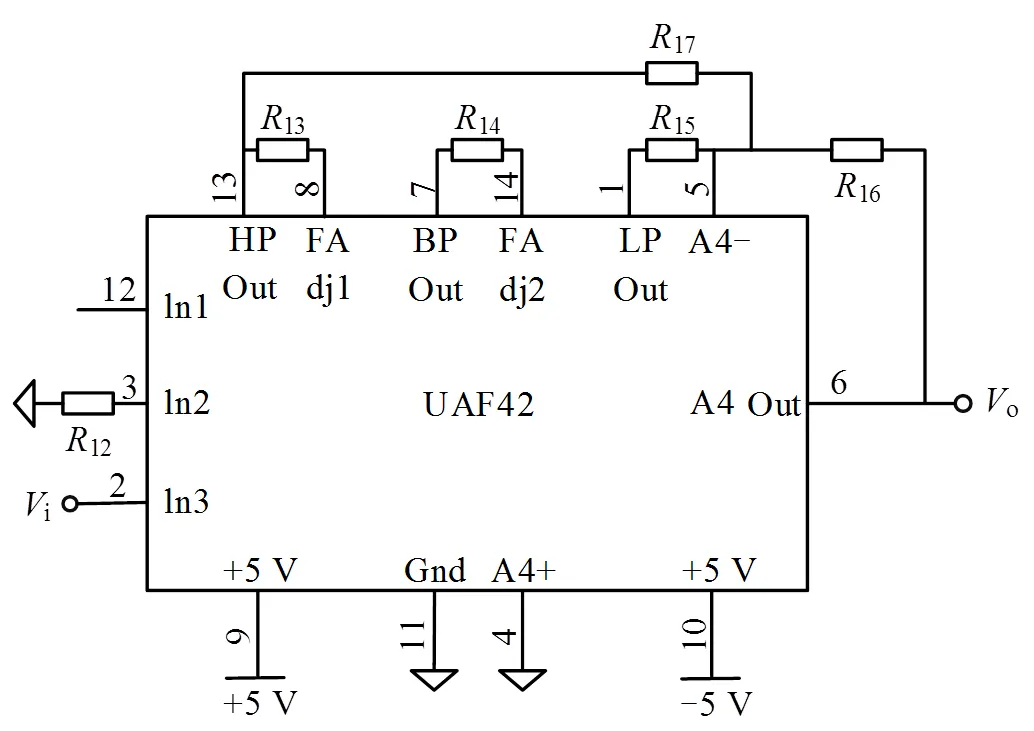
图6 工频陷波电路图


在实际应用中,市电频率往往会有偏差。因此在工频陷波电路中,采用2个UAF42级联的方式陷波,陷波中心频率分别为49.8 Hz和50.2 Hz,其参数选择如表1所示。
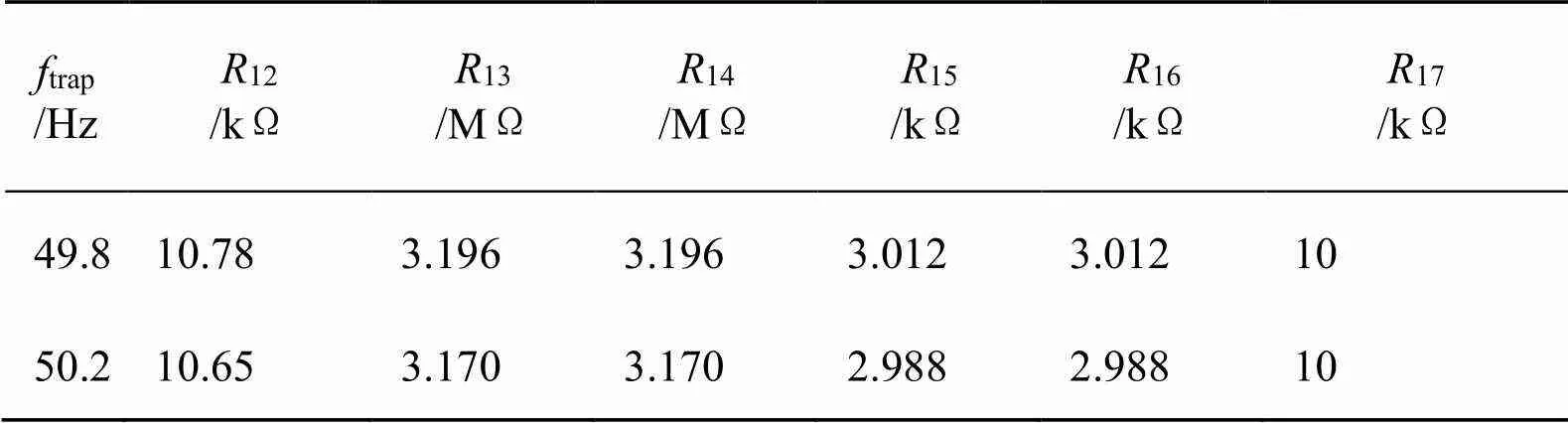
表1 陷波电路参数
3.5 后级放大电路
本系统后级放大采用反相比例放大电路[4],如图7所示,选择级联一个同样放大倍数的放大电路,共同完成放大功能。
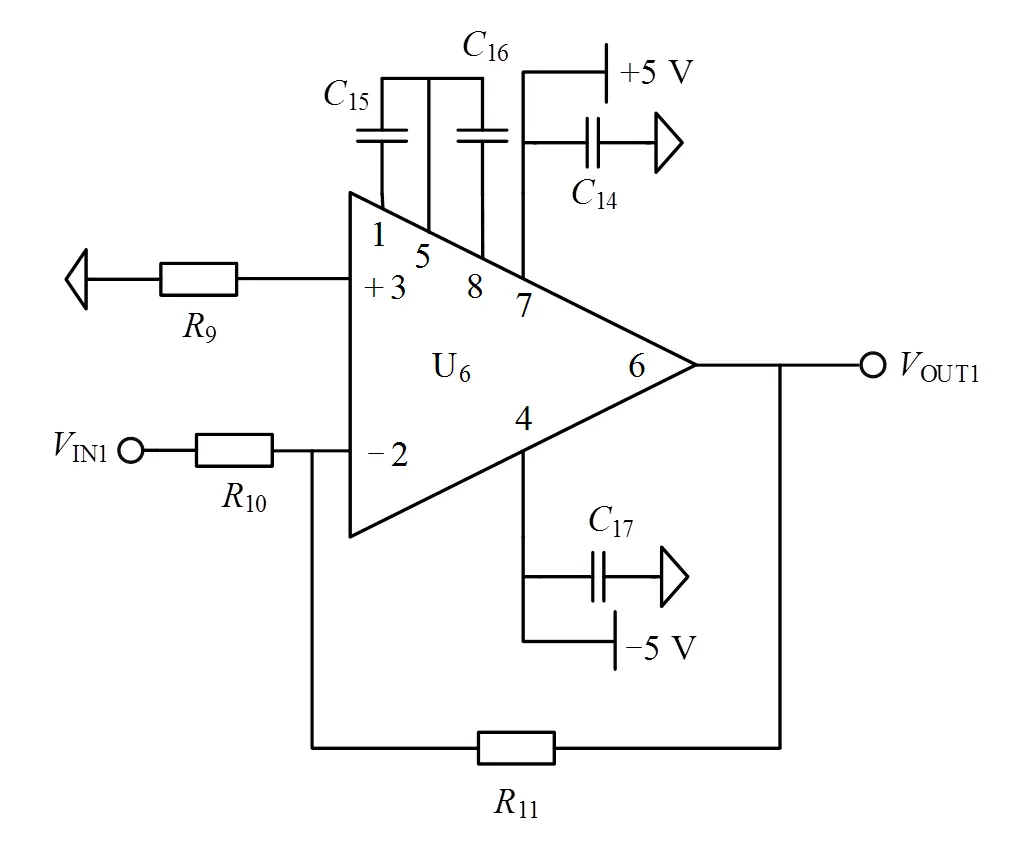
图7 后级放大电路结构图
3.6 阻抗检测电路
SEMG信号采集之前的准备工作包括电极正确安放和在电极与皮肤之间注入电极膏。当电极和皮肤表层接触不良时,信号源阻抗较高,电极的极化电压较大,不利于SEMG信号采集。SEMG信号采集一般要求电极与皮肤之间的阻抗低于10 kΩ[6]。同时,肌电电极数较多(本系统有9个电极),注入电极膏时可能存在电极接触不良的情况。阻抗检测电路检测每个电极的阻抗是否符合SEMG信号采集要求。
阻抗检测电路采用AD5933芯片,它是一种高精度阻抗数字直接变换系统,主要由1个12位、1 Ms/s的片上频率发生器和1个片上模拟数字转换器组成。频率发生器可以产生特定频率的信号激励外部复阻抗。复阻抗的响应信号由片上模拟数字转换器采样后,再通过片上数字信号处理器进行离散傅立叶变换。
4 软件设计
上肢康复运动的肌肉电信号采集系统软件主要利用单片机实现多通道的SEMG信号采集控制,流程如图8所示。
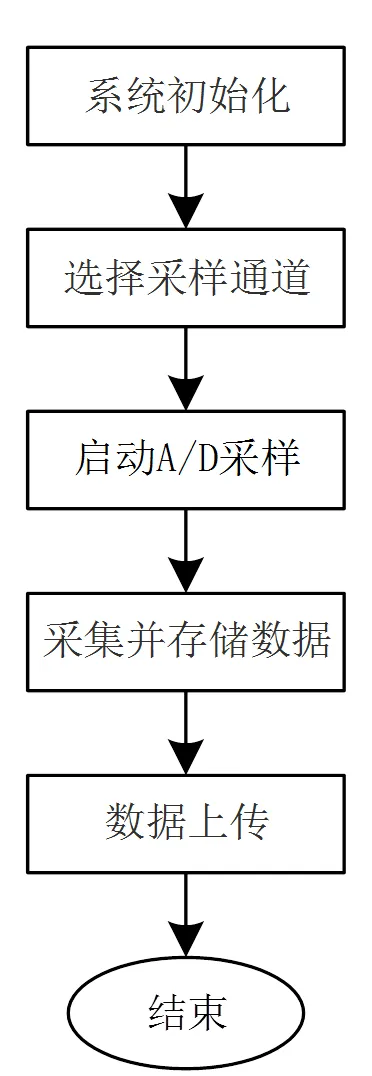
图8 软件流程图
首先,系统初始化,设置采样频率为1 kHz;然后,选择采样通道,启动A/D采样,并对采集信号进行存储;最后,通过USB将信号上传到上位机进行后续分析处理。
5 实验
本文利用8路SEMG信号[7],通过前置电路放大,右腿驱动电路降低共模干扰,低通滤波、高通滤波、工频陷波和后级放大,测得SEMG信号。
实验采集10个受测者肩关节运动(前伸、后伸、外展、内收、肘屈和旋内)的SEMG信号,每个动作采集10段数据,每段数据采集时间为30 s,采样频率为1 kHz。首先,通过滑动窗口的方法提取每段肩关节动作数据的特征值;然后,将特征值作为深度神经网络算法的输入数据,训练分类模型;最后,得到的实验数据如表2和图9所示,经过模型训练均获得了82%以上的准确率。表明本系统采用的方法有效,能较好地满足后续分类模型的需求。

表2 各动作识别准确度
6 结论
本文针对上肢康复运动的肌肉电信号采集系统进行研究,设计前置电路、右腿驱动电路、滤波电路、工频陷波电路、后级放大电路和阻抗检测电路。实验结果表明:该系统设计方案合理,能较好满足后续分类模型的需求。
[1] 方泓煜.表面肌电采集系统及应用研究[D].成都:电子科技大学,2017.
[2] 张春.穿戴式肌点采集设备的研究与应用[D].东南大学,2016.
[3] 孙宇舸.基于右腿驱动技术的脑电信号放大器的设计[J].东北大学学报,2010.
[4] Nisse I. Smart appliances and EMC appliance manufacturer[J]. Electronic Component & Device A pplications,2002.50(3):16-17.
[5] 蔡佳.16导脑电采集系统硬件设计[D].成都:电子科技大学,2013.
[6] 李鹏霄.64导联脑电采集系统电路设计[D].成都:电子科技大学,2017.
[7] Tomioka R. Logistic regression for single trial EEG classification[J]. Neural Information Prcessing Systems, 2007,19(5): 1377-1384.
Muscle Electrical Signal Acquisition System for Upper Limb Rehabilitation
Chen Changming Zhou Xuanru Tan Yingxiao Huang Hongbiao Cao Dong
(School of Medical Information Engineering, Guangzhou University of Traditional Chinese Medicine, Guangzhou 510006, China)
Based on the different degree of motor dysfunction in the shoulder of stroke patients, a muscle electrical signal acquisition system for rehabilitation of upper limb was designed. Firstly, the surface muscle electrical signals of eight channels were collected by means of the meter stick method. Then through the front circuit for amplification, and using the right leg drive technology to reduce the role of common mode; Then through low - pass and high - pass filtering, power frequency notch wave; Finally, the rear stage is enlarged. The experimental results showed that the accuracy of the system was 82%.
upper limb rehabilitation; muscle electrical signal; acquisition system
本项目获得广东省攀登计划项目资助
陈畅明,男,1998年,本科,主要研究方向:计算机科学与技术。
周炫汝,男,1998年,本科,主要研究方向:生物医学工程。
谭迎宵,男,1998年,本科,主要研究方向:生物医学工程。
黄鸿彪,男,1997年,本科,主要研究方向:计算机科学与技术。
曹东(通信作者),男,1975年,博士,教授,主要研究方向:生物医学工程。E-mail: caodong9@163.com
TP216
A
1674-2605(2020)02-0006-06
10.3969/j.issn.1674-2605.2020.02.06
