塔式太阳能热发电中定日镜的精度检测方法
2020-05-08张旭中黄圆明陈康立刘文闯朱正平
张旭中,李 伟,黄圆明,陈康立,刘文闯,朱正平
(1.浙江中控太阳能技术有限公司,杭州 310053;2.青海中控太阳能发电有限公司,德令哈 817000)
0 引言
定日镜是塔式太阳能热发电中将阳光反射到吸热器上的重要设备,吸热器工质吸收高倍聚焦的太阳能,并通过换热器产生高温高压过热蒸汽来推动汽轮机发电,从而将太阳能转化为电能[1]。目前,塔式太阳能热发电站中镜场的规模通常在50 MW以上,定日镜距离吸热器的距离一般在几百米到1000 m之间。由于反射距离太远,对于定日镜所应具有的跟踪准确度及光斑大小都提出了很高的要求[2]。但由于电站中定日镜的使用数量众多,安装环境的条件较差,因此很难保证定日镜的精度检测质量和检测效率。本文结合笔者在塔式太阳能热发电项目中的工作经验,介绍了定日镜关键零部件及其整体的精度检测方法。
1 定日镜关键零部件的精度检测
定日镜关键零部件的精度检测主要包括对减速机、推杆(含电动及液压推杆)的精度检测。
1.1 减速机的精度检测
1.1.1 检测内容
在风抗条件下,减速机可靠的自锁性能是保证定日镜正常运行的前提之一;减速机可靠的刚性及传动精度可保证定日镜的跟踪准确度。因此,需对减速机的自锁性能、刚性和传动精度进行检测。
1.1.2 检测设备
浙江中控太阳能技术有限公司(下文简称“中控太阳能”)设计了减速机测试工装,可同时对减速机的自锁性能、传动精度及刚性进行测试。减速机测试工装实物图如图1所示。

图1 减速机测试工装实物图Fig.1 Product picture of slew drive test tooling
该测试工装由液压站、液压缸、压力传感器、百分表、计算机及软件组成。
1)液压站:可提供连续稳定的高压油。
2)液压缸:输出测试所需的动力源,工作压力最高能达到20 MPa。
3)压力传感器:用于反馈液压缸输出力的大小,量程为2~10000 kg,精度等级为0.05%。
4)百分表:为电子百分表,记录减速机的变形量或位移量,量程为0~25 mm,分辨率为0.01 mm。
5)计算机及软件:用于控制负载的大小和方向,并自动读取百分表数值,计算减速机相关精度参数。
1.1.3 检测方法
1)减速机自锁性能的检测方法为:①将减速机安装于减速机测试工装上;②将百分表表架吸在工装上,表头顶在固定于减速机外壳上的测试杆上,记录百分表表头到减速机中心的距离L;③按1 Hz频率,在减速机输出端施加冲击力矩P,持续30 s;④冲击完成后,从上位机读取百分表上的位移读数A;⑤根据式(1)计算减速机的自锁性能Z1。

2)减速机传动精度的检测方法为:①将减速机安装于减速机测试工装上;②将减速机设置为初始状态(0°状态);③将百分表表架吸在工装上,表头顶在固定于减速机外壳上的测试杆上,记录百分表表头到回转中心的距离L1-1;④在减速机壳体正方向施加负载力矩T,从上位机读取百分表上的位移读数A1-1,卸力后在减速机壳体反方向施加负载力矩T′(大小与T相同,方向相反),从上位机读取百分表上的位移读数B1-1;⑤根据式(2)计算减速机0°状态的蜗轮蜗杆侧隙传动精度;⑥撤离百分表,将减速机顺时针转动10°后重新打表,减速机转动过程中对减速机施加与转动方向相反的负载力矩T1,并保证百分表表头到回转中心的距离为L2-1,从上位机读取百分表上的位移读数A2-1;⑦将减速机再逆时针转动10°,减速机转动过程中对减速机施加与转动方向相反的负载力矩T1′(大小与T1相同,方向相反),从上位机读取百分表上的位移读数B2-1;⑧根据式(3)计算减速机0°状态时的传动精度S2-1;⑨将减速机输出轴分别转动至120°和240°,重复步骤③~⑧;⑩减速机在120°、240°状态下的蜗轮蜗杆侧隙传动精度分别为S1-2、S1-3;⑪ 减速机在 120°、240°状态下的传动精度分别为S2-2、S2-3;⑫减速机蜗轮蜗杆侧隙传动精度为(S1-1+S1-2+S1-3)/3,减速机传动精度为(S2-1+S2-2+S2-3)/3。

3)减速机扭转刚性的检测方法为:①将减速机安装于减速机测试工装上;②将百分表表架吸在工装上,表头顶在固定于减速机外壳上的测试杆上,记录百分表表头到减速机中心的距离L3-1;③正向施加扭矩T2,从上位机读取百分表上的位移读数A3-1;④同向施加扭矩至T3,从上位机读取百分表上的位移读数B3-1;⑤根据式(4)计算减速机扭转刚性K1。

4)减速机倾覆刚性的检测方法为:①将减速机安装于减速机测试工装上;②将百分表表架吸在工装上,表头顶在固定于减速机外壳上的测试杆上,记录百分表表头到回转中心的距离L4-1;③在减速机上施加倾覆力矩m,从上位机读取百分表上的位移读数A4-1;④根据式(5)计算减速机倾覆刚性K2。

1.1.4 减速机检测结果示例
当减速机在测试工装上安装完成后,减速机的检测结果由测试软件实时自动生成。在测试软件中可设置参数和读取测试数据,并进行图像化处理。对4台减速机进行测试,各项目的检测数据如表1所示。

表1 4台减速机各项目的检测数据Table 1 Test data of each item of 4 reducers
表1中的数据全部由软件自动完成,排除了人为误差的影响,因此检测结果准确可靠;且检测时间较快,能够在20 min内完成所有测试项的检测。
1.2 推杆的精度检测
1.2.1 检测内容
推杆(包括电动及液压推杆)的精度检测主要包括自锁性能、刚性和传动精度。
1.2.2 检测设备
中控太阳能设计了专用的检测工装,可以同时对推杆的自锁性能、刚性及传动精度进行测试。推杆测试工装实物图如图2所示。

图2 推杆测试工装实物图Fig.2 Product picture of linear actuator test tooling
推杆测试工装由负载系统、压力传感器、卡板、百分表、计算机及软件组成。
1)负载系统:采用气泵作为动力源,气缸作为执行机构,负载最大值≥1.5 t。
2)压力传感器:用于反馈推杆受到负载的大小,量程为20~10000 kg,精度等级为0.05%。
3)卡板:固定于推杆内管上,与百分表配合显示推杆内管位移量。
4)百分表:与减速机测试工装的百分表相同。
5)计算机及软件:用于控制负载的大小和方向,并自动读取百分表数值,以计算推杆的相关精度参数。
1.2.3 检测方案
1)推杆静态自锁性能的检测方法为:①将推杆安装于推杆测试工装上;②将推杆从零位伸出到H1位置并停止;③沿推杆轴向,在推杆内管上正向施加负载力矩F1;④将百分表表架吸在工装上,表头顶在固定于推杆内的卡板上,持续30 s后将百分表进行清零;⑤1 min后,从上位机读取百分表上的位移读数C1;⑥撤离百分表,切换负载方向,在推杆内管反方向施加负载力矩F1′(F1′与F1大小相同,方向相反);⑦重复步骤④、⑤,从上位机读取百分表上的位移读数D1;⑧若|C1|、|D1|均为零,则判定推杆静态自锁性能满足设计要求。
2)推杆动态自锁性能的检测方法为:①将推杆安装于推杆测试工装上;②将推杆从零位伸出到H2位置并停止;③沿推杆轴向,在推杆内管上正向施加负载力矩F2;④将百分表表架吸在工装上,表头顶在固定于推杆内的卡板上,持续30 s后将百分表进行清零;⑤按1 Hz频率,在推杆内管施加≥F2的冲击力,持续时间30 s;⑥30 s结束后,在推杆内管正方向保持负载力矩F2;⑦保持负载10 s后,从上位机读取百分表上的位移读数C2;⑧撤离百分表,切换负载方向,在推杆内管反方向施加负载力矩F2′(F2′与F2大小相同,方向相反),重复步骤④、⑤,结束后在推杆内管反方向保持负载力矩F2′,保持负载10 s后,从上位机读取百分表上的位移读数D2;⑨根据式(6)计算推杆动态自锁性能Z2。

3)推杆传动精度的检测方法为:①将推杆安装于推杆测试工装上;②将推杆从零位伸出到H3位置并停止;③沿推杆轴向,在推杆内管上正向施加负载力矩F3;④将百分表表架吸在工装上,表头顶在固定于推杆内的卡板上并清零;⑤切换负载方向,在推杆内管上反向施加负载力矩F3′(F3′与F3大小相同,方向相反),从上位机分别读取百分表在正、反向负载下显示的位移读数C3、D3;⑥根据式(7)计算推杆传动精度S。

4)推杆轴向刚性检测方法为:①将推杆安装于推杆测试工装上;②将推杆从零位伸出到H4位置并停止;③沿推杆轴向,在推杆内管上正向施加负载力矩F4;④将百分表表架吸在工装上,表头顶在固定于推杆内的卡板上并清零;⑤切换负载方向,在推杆内管上反向施加负载力矩F4′(F4′与F4大小相同,方向相反),从上位机上分别读取百分表在正、反向负载下显示的位移读数C4、D4;⑥根据式(8)计算推杆轴向刚性K3。

1.2.4 推杆检测结果示例
推杆在测试工装上安装完成后,推杆的检测结果由测试软件实时自动生成,在测试软件中可设置参数和读取测试数据。表2是10次测试中推杆各项目的检测数据。

表2 推杆各项目的检测数据Table 2 Test data of each item of the putter
表2中数据的读取和处理全部由软件完成,排除了人为误差的影响,因此检测结果准确可靠;且检测时间较快,静态自锁和动态自锁均能够在5 min内完成检测,传动精度和轴向刚性检测均能够在1 min内完成检测。
2 定日镜整体的精度检测
定日镜整体的精度检测主要包括定日镜跟踪准确度检测和定日镜面形精度检测。
2.1 定日镜跟踪准确度检测
2.1.1 检测设备
跟踪准确度测量系统由定日镜、靶面、相机、计算机及软件、风速风向仪、辐射表组成,如图3所示。
1)靶面(BCS板):靶面表面需具有漫反射特性,靶面尺寸应大于吸热器的直径与高度组成的矩形。
2)相机:用于采集靶面上的定日镜光斑图像,帧率≥10 fps,分辨率≥640×480,工作温度在-60~-30 ℃之间。
3)计算机及软件:用于计算定日镜光斑的几何中心位置,图像处理帧率≥10 fps。

图3 跟踪准确度测量系统Fig.3 Tracking accuracy measurement system
4)风速风向仪:量程为0~60 m/s,精度<0.1 m/s。布置在定日镜上风向,安装高度为距离定日镜中心点2~5倍定日镜高度。
5)辐射表:用于采集太阳法向直射辐照度,量程为0~4000 W/m2。
2.1.2 检测环境
风速≤16 m/s,太阳法向直射辐照度>300 W/m2。
2.1.3 检测方案
检测当天应测试每台定日镜至少8个时间点的跟踪准确度,这8个时间点定日镜的角度应包含定日镜方位角和水平角工作角度范围的90%。
定日镜跟踪准确度测试采用非接触式的计算机视觉检测方法,利用相机采集定日镜在目标靶面上形成的光斑图像,然后利用数字图像处理技术获取定日镜光斑的特征参数。具体步骤如下:
1)靶面的中心点是通过靶面上4个黑色直角框进行标定,4个黑色直角框对角线焦点即为靶面的中心点,其坐标为(x0,y0,z0)。
2)以靶面的中心点作为目标点,将定日镜光斑投射至靶面,如图4所示。
3)利用相机获得靶面图像并进行处理,分析第i时刻的采集图像,计算光斑几何中心坐标(xi,yi,zi),其中,i=1,2,…,n;测得定日镜旋转中心点的坐标为(xh,yh,zh)。定日镜旋转中心至靶面中心的向量HO可表示为:
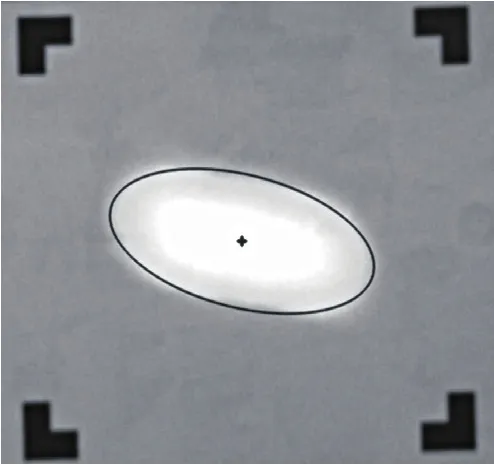
图4 靶面上的定日镜光斑图像Fig.4 Heliostat spot image on the target surface

第i时刻定日镜旋转中心至光斑中心的向量HS(i)可表示为:

第i时刻定日镜的跟踪误差为:

测试期间定日镜跟踪准确度的均值u可由式(12)求得:

式中,N为测试时间点的个数。
测试期间定日镜跟踪准确度的标准差σ可由式(13)求得:

镜场中被测定日镜样本的跟踪准确度分别为u1,u2,…,uM,则整个镜场定日镜平均跟踪准确度为:

式中,M为定日镜样本数。
2.1.4 定日镜跟踪准确度检测结果示例
测试的前提条件为:太阳法向直射辐照度>300 W/m2,准确度数据对应的角度为测试时不同测试时间点定日镜跟踪目标靶中心的跟踪角度。一般定日镜跟踪准确度在4 mrad以内时,大致可以认为其光斑还在目标靶面上,则定日镜跟踪准确度在4 mrad以内的频率可以作为该面定日镜因跟踪准确度而获得的可用率的依据。测得的不同风速下定日镜跟踪准确度的频率如图5所示。

图5 不同风速下定日镜跟踪准确度的频率图Fig.5 Frequency diagram of heliostat tracking accuracy at different wind speeds
由图5可知,在风速≤5 m/s时,定日镜跟踪准确度在4 mrad以内的频率为100%,即不存在因跟踪准确度不佳而造成定日镜不可用的情况。
2.2 定日镜面形精度检测
2.2.1 定日镜面形检测原理
定日镜局部镜面斜度与理想斜度出现偏差,或整个定日镜的方向偏离其期望的目标点(跟踪偏差)[3],反射光线都会出现偏差。事实上,定日镜真实镜面的宏观和微观缺陷都会导致镜面反射的太阳光线的偏差。这种偏差可通过镜面实际法向量nreal与理想法向量nideal的偏差或入射太阳光束的实际反射方向与理想方向的偏差来描述[4]。前者用于描述镜面的图形,后者用于描述反射光束的图形。图6为定日镜不同的偏差类型。
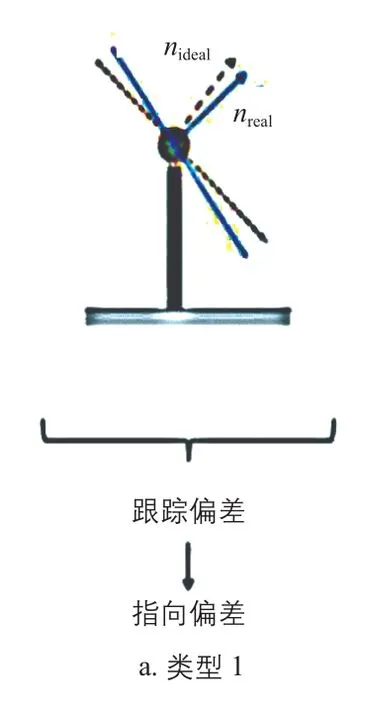

图6 定日镜不同的偏差类型Fig.6 Types of reflection errors for heliostats
在任何情况下,定日镜的面形缺陷都可以表示为角度偏差,常用的单位是mrad。通过统计偏差的分布,可以得到一个定日镜大量的局部镜面斜率偏差值,结合定日镜的跟踪偏差可以判断镜面反射的太阳光线的偏差随时间变化的规律,或判断大批量定日镜反射的太阳光线偏差行为模式[5]。
将定日镜的镜面网格划分后,各个网格单元面的法向矢量分布可作为表示细节形状的矩阵导入光斑仿真软件,并提供优异的分析结果,用于指导定日镜面形优化设计。为了更加定量的描述角度偏差,其统计分布大多采用平均值MEAN和标准差STD的平方和再开方后的值RMS表示。

经过计算发现,某些量的平均值为零,则此时RMS=STD。这说明在某些特定条件下,RMS可以简化运算。
2.2.2 检测设备
1)定日镜:已安装在立柱上的定日镜可以实现正常的2轴运动。
2)投影幕:投影幕用于投射条纹图案,设置于接近被测定日镜焦距的位置。
3)相机1:用于拍摄经定日镜反射后的条码的像。
4)相机2:用于直接拍摄投影幕上的条码,校正由于投影幕不平带来的偏差。
5)投影仪:用于将条码图案投射至投影幕上,其分辨率应≥1080P。
2.2.3 检测环境
测试需要在能见度良好的夜间进行,风力≤3级。被测定日镜、投影幕、相机和投影仪相互之间的光路不应存在任何遮挡。
2.2.4 检测方案
采用高分辨率的偏转测量法,将已知的规则条纹图案投影到投影幕上。其中,定日镜中的反射像由相机观察,反射像中条纹图案的变形用于评估定日镜的局部斜率。测量定日镜偏转形状的设置方式如图7所示。第2台相机用于拍摄目标上的条纹图案,以进行校准,但在图7中未画出。在每次测试中都需要投影一系列规则条纹图案,以保证测量结果的准确性。

图7 测量定日镜偏转形状的设置方式Fig.7 Setting method of measuring the deflection shape of a heliostat
2.2.5 定日镜面形精度检测结果示例
图8为投影幕表面上投影的水平条纹图案及从相机中看到的定日镜反射出的相应图案。
将相机拍摄所得的条码的像导出后通过Matlab软件进行所有条码的坐标转换与面形的拟合,以便得到完整的定日镜面形。图9为拟合后的定日镜面形色温图。


图8 投影幕表面上投影的水平条纹图案及从相机中看到的定日镜反射出的相应图案示例Fig.8 Examples of the horizontal stripe pattern projected on the projection screen surface and the corresponding pattern reflected by the heliostat as seen from the camera
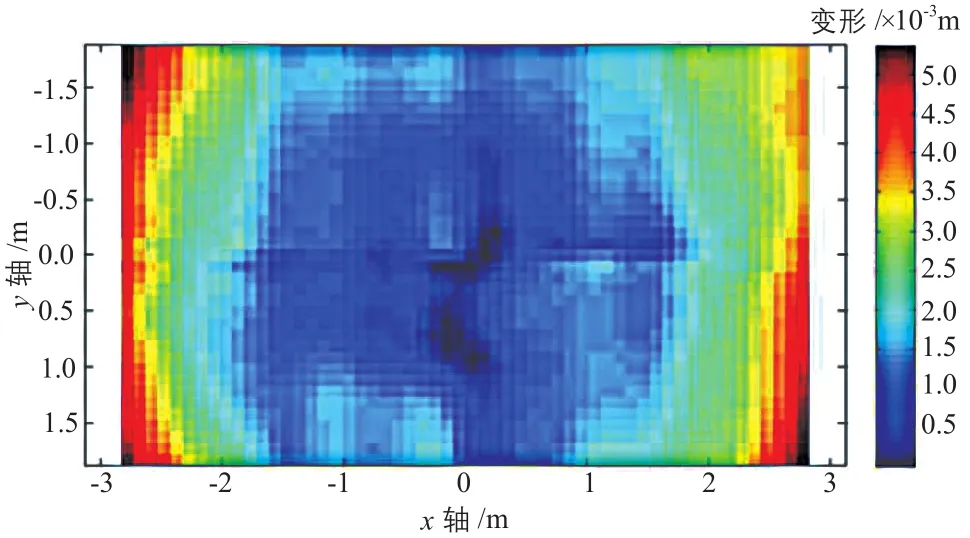
图9 拟合后的定日镜面形色温图Fig.9 Heliostat surface color temperature diagram after fitting
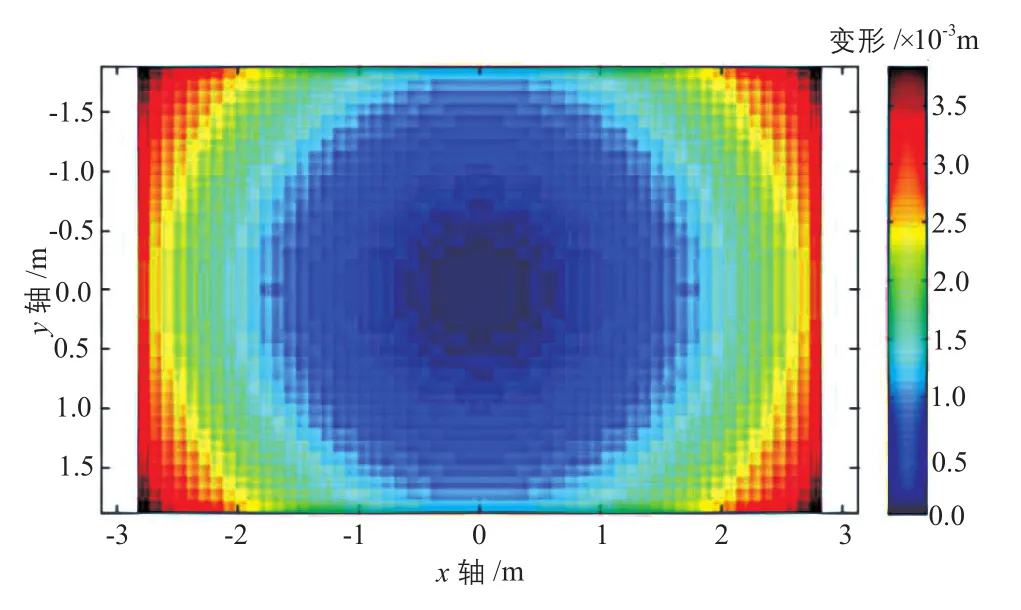
图10 理论设计的定日镜面形Fig.10 Theoretical design of heliostat surface shape
获得拟合后的定日镜面形后,将各个局部镜面的法向量分别投影到全局坐标系的2个基准面上,并与理论设计的定日镜面形(见图10)进行比较,得到局部镜面沿长度方向和宽度方向的法向偏差(见图11),用于判断定日镜面形是否合格。

图11 实测局部镜面沿长度方向和宽度方向的法向偏差Fig.11 The normal deviation of the measured mirror surface along the length direction and width direction
图11为中控太阳能生产的某面定日镜的镜面法向偏差实测结果。由图11可知,镜面沿长度方向和沿宽度方向的局部实际倾斜角与理想倾斜角的偏差均在±4 mrad范围内。从坐标系来看,图11a中局部法向量向左偏为负,向右偏为正;图11b中法向量向上偏为负,向下偏为正。从色温图来看,暖色代表正偏差,冷色代表负偏差。图11a中定日镜的法向偏差在左半部分集中表现为负偏差(色调偏冷);而右半部分同时存在正偏差与负偏差,但正偏差略多。这表示长度方向上的焦距将比设计焦距更长。图11b中定日镜的法向偏差在上半部分主要为正偏差(偏暖),而下半部分主要为负偏差(偏冷)。这表示于宽度方向上的焦距将比设计焦距更短。在实际应用中,可以通过重新调整镜面来纠正这种错位。还有一些局部区域的偏差尤其是图11b左下角的镜板中的偏差,可能是由于定日镜安装时的误差和弯曲造成的应力导致的。
3 结论
本文描述了塔式太阳能热发电中定日镜精度检测方法,该方法及设备已经在中控太阳能承建的青海德令哈50 MW塔式太阳能热发电项目及青海共和50 MW塔式太阳能热发电项目上得到了实际应用,且测试效率高、测试精度准确,能够满足批量检测的要求。
