军用飞机斤斗类飞行轨迹最优化方法
2020-05-07陈柏松
潘 军, 陈柏松, 华 欣
(空军航空大学航空作战勤务学院,长春 130022)
飞机在进行斤斗类机动时,需要考虑边界进入高度-速度的问题,以防止改出机动时超过最大(最小)速度限制,这是飞行员需要掌握的重要飞行指标之一[1]。
现有的斤斗类机动边界性能求解方法主要是根据相关的飞行参数或手册数据,给出法向过载规律,然后反推计算出所需迎角[2],同时,在飞行过程中对迎角和高度-速度加以限制,进而求出边界性能范围并绘制飞行包线[3]。但这种方法只能得到特定法向过载规律下的边界性能,得出的结果和最优结果有较大差距,这不利于发挥飞机的最佳性能,因此需要对法向过载规律进行优选以优化飞行轨迹。但是,对斤斗类飞行轨迹进行优化并求解边界性能的研究少有报道。
为了发挥飞机的最佳性能,需要对飞行轨迹进行最优化。常用的轨迹最优化方法主要是遗传算法[4]、模拟退火算法[5]、蜂群算法[6]等。但是,传统的优化算法与数值积分结合的方式会增加计算复杂度,为此,将神经网络优越的非线性拟合性能与遗传算法优越的寻优性能相结合。首先,计算不同进入条件和不同法向过载控制规律下,改出动作时的表速情况,拟合出改出斤斗类机动时的速度与进入条件和法向过载控制规律之间的关系;之后,利用遗传算法的全局寻优特点,探索斤斗类机动最佳控制规律。
经过仿真验证,轨迹最优化方法能够用于优化斤斗类机动的飞行轨迹,有利于更好地发挥飞机的技战术性能,有一定的实用意义。
1 斤斗类机动计算模型的构建
1.1 运动学模型
根据斤斗类机动的运动学特点,这里认为飞机只在垂直面内机动,不考虑舵面偏转对整体气动特性的影响,可得到运动方程为[7]

(1)
式(1)中:V为飞机的飞行速度,km/h;α为迎角,(°);P为发动机的可用推力,N;φP为发动机安装角,(°);g为重力加速度,m/s2;G为飞机重力,N;θ表示轨迹角,(°);H表示高度,m;L表示升力,N;D表示飞机所受的阻力,N。
结合法向过载表达式:
(2)
可以得到与法向过载有关的斤斗类机动的运动模型为
(3)
1.2 大气模型
研究所用的大气模型为标准大气模型[7]:

(4)
ρH=ρ0(1-2.255 77×10-5H)4.255 88
(5)
TH=T0-0.006 5H
(6)
式中:cH为H高度的声速,m/s;ρH为H高度的空气密度,kg/m3;TH为H高度的温度,℃;c0表示海平面处声速,m/s;ρ0表示海平面处的空气密度,kg/m3;T0表示海平面处温度,℃。
1.3 升力系数和推力模型
计算中,认为升力系数、阻力系数是随迎角和马赫数变化的函数,发动机最大可用推力是随马赫数、飞行高度、环境温度变化的函数,可以插值得到升力系数、阻力系数和最大可用推力的计算式为[7-8]
CL=f1(α,Ma)
(7)
CD=f2(α,Ma)
(8)
P=f3(Ma,H,T)
(9)
式中:f1、f2、f3分别为升力系数、阻力系数和最大可用推力的插值函数;Ma表示马赫数;T表示环境温度,℃。
2 斤斗类机动的计算
2.1 迎角约束
飞行过程中,飞行员以某一法向过载拉起,为了保持规定法向过载,要不断动杆改变迎角,当实际使用迎角大于抖动迎角时,最大只能按照抖动迎角飞行[1]。
当法向过载反推的飞行迎角小于抖动迎角时,过载控制规律为
ny=f4(θ)
(10)
式(10)中:f4为飞行中法向过载控制规律的插值函数。
上式的法向过载控制规律可以由飞参数据中获取,也可以运用最优化方法对飞行法向过载取值进行优化,得到最佳结果。
若实际飞行迎角大于抖动迎角,则

(11)
式(11)中:Sw表示机翼升力面面积,m2;CLα抖表示抖动迎角对应的升力系数;α抖表示抖动迎角,(°)。对飞行迎角加以限制是保证飞行安全的需要,一般将飞行迎角限制在特定构型的抖动迎角以下,以确保飞机结构和操纵的稳定。
2.2 速度约束
2.2.1 最小速度约束
飞行过程中,如果速度过小容易造成动压值偏小,根据升力公式:
(12)
可知速度过小操纵舵面所能提供的操纵力矩无法满足使用要求,容易使得舵面超偏,不仅影响操纵效能,也会破坏飞机结构。
由于不同飞行高度处空气密度差异很大,根据真速和表速的关系:
(13)
2.2.2 最大速度约束
计算中使用最大马赫数作为最大速度的约束条件。马赫数的计算式为
(14)
2.3 目标函数
为了实现求算最大边界性能的要求,选取动压函数V表为目标函数,要求目标函数在最大最小区间范围内。根据真速和表速的换算关系:

(15)
结合式(3),基于Matlab/Simulink仿真平台数值积分,就可以对计算初始条件进行限制,取得合理的结果。
2.4 计算结果验证
半斤斗翻转上升过程中发动机处于最大工作状态,进入时,全机油量1 300 kg,飞行质量6 900 kg,按照飞参数据中给出的关键点法向过载设置对应载荷,其余位置载荷使用按线性均匀变化得到。结果如表1所示。
在前文中已经对公共服务均等化供给进行了理论模型分析,分析了不同影响因素对公共服务均等化能力的影响。而公共服务均等化能力是一个抽象的名称,只有把它转化成一个可以衡量的指标才能进行进一步实证研究,因此我们需要构建一个相对应的基本公共服务均等化指数来测度和衡量公共服务均等化能力大小。

表1 计算数据和飞参数据对比
从对比结果可以看出,计算数据和飞参数据比较接近,误差较小,所以可以使用构建的计算模型对飞机的斤斗类机动进行研究。
3 神经网络求解改出速度与操作规律的关系
3.1 神经网络方法原理
斤斗类运动末端速度和操纵过载之间的关系是一种高度多元非线性关系,一般的拟合方法难以取得良好效果,这里使用神经网络方法,运用其良好的非线性拟合能力,探索法向过载使用对飞行情况的影响。
当训练样本数量达到一定数量,并且训练函数选择恰当时,就可以使数据的预测精度达到实用要求。相关文献表明:具有一个隐层并且隐层作用函数为S型、输出层作用函数为线性函数的BP神经网络模型,可以规定的精度逼近任意一个连续的多元函数[9]。
研究使用的tansig函数为隐层的作用函数,其表达式为[10]

(16)
线性函数为输出层的作用函数,其表达式为
y=x
(17)
数据的归一化和反归一化:
研究使用的神经网络归一化准则为

(18)
式(18)中:yt表示归一化后的变量;ymax表示归一化后变量的最大值;ymin表示归一化后变量的最小值;xmin表示原始变量的最大值;xmax表示原始变量的最小值。式中各量的单位与对应的物理量的单位相同。
反归一化准则为

(19)
3.2 神经网络算例
首先,利用MATLAB/Simulink平台仿真得到了396组不同条件下的半滚倒转数据和660组半斤斗翻转飞行数据,均采用三层神经网络,隐层节点数均为10,输出层节点数均为1,训练函数为贝叶斯正则化方法,最大训练次数为1 000。80%的数据进行训练,10%的数据进行调整,10%的数据进行测试。对数据进行归一化和反归一化后,对某型飞机进行计算。半滚倒转的输入层节点数为7,分别对应进入速度、进入高度和5个位置的法向过载;半斤斗翻转的输入层节点数为3,分别对应3个位置的法向过载。神经网络的训练精度结果如图1~图4所示。

图1 半滚倒转神经网络模型训练精度Fig.1 Training accuracy of split-s neural network model

图2 半斤斗翻转神经网络模型训练精度Fig.2 Training accuracy of immelmann neural network model
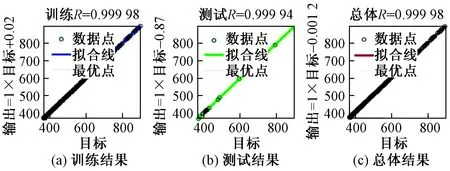
图3 半滚倒转神经网络模型训练结果Fig.3 Neural network model training results of immelmann

图4 半斤斗翻转神经网络模型训练结果Fig.4 Neural network model training result of immelmann
图3、图4中,R表示神经网络训练的相关系数,越接近1表明精度越好,图3(a)与图3(b)显示了神经网络的训练均方差结果、测试均方差结果和总体的均方差结果。结果表明,所使用的神经网络能够以较高的精度对斤斗类机动的末端速度进行预测,具有一定的实用性,以权值为评价指标得到了末端速度和斤斗操纵情况及进入情况直接的关系,实用价值较高,为利用遗传算法优化奠定了基础。
4 遗传算法对过载规律寻优
4.1 遗传算法原理
斤斗类飞行过程中,末端速度与飞行过程中的法向过载选择有很大关系。例如,半斤斗滚转拉起过程中,如果以较大法向过载拉起,俯仰角变化速度快,高度增加少,重力势能增加量小。然而,这种情况下运动时间段,发动机做功时间短,飞机迎角较大又会使得阻力大,损失能量也比较多。类似的,对于半滚倒转,在垂直位置之前,如果使用的法向过载大,飞机下降的高度多,重力势能做功也多,容易使飞机速度增加,但是使用大法向过载也能够缩短运动时间,减小发动机做功,也会影响改出速度,所以引入遗传算法寻找最优操纵规律。
遗传算法是借鉴生物界自然选择和自然遗传机制的随机全局搜索和优化方法,是一种全局搜索方法,能在搜索过程中自动获取和积累有关搜索空间的知识,并自适应地控制搜索过程以求得最优解的方法[11]。
直接对飞行过程中的法向过载进行编码,所得结果可以直接用到控制规律求解中。将斤斗类飞行过程每30作一等分,半滚倒转中,210°~330°航迹倾斜角处的过载分别为x1、x2、…、x5并组成一条染色体;半斤斗翻转中,30°、60°、90°航迹倾斜角处的过载为x6、x7、x8,并组成一条染色体,如表2所示。
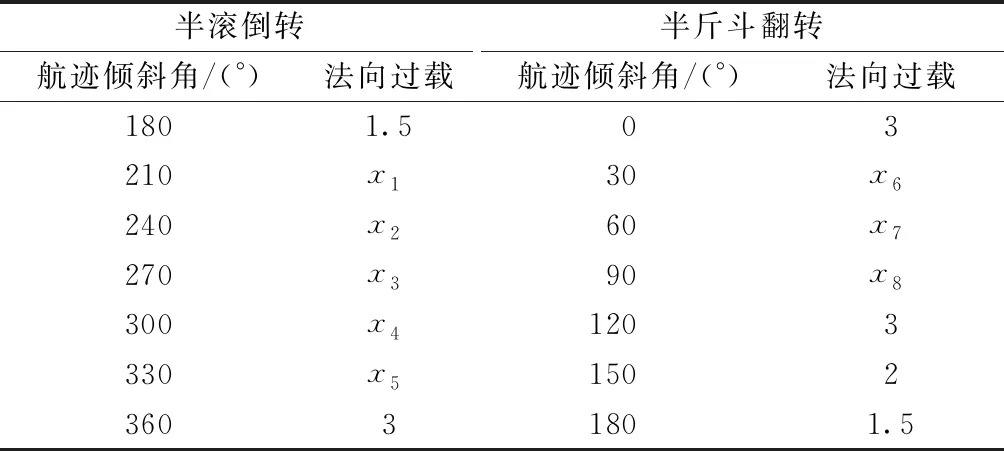
表2 运动过程中的法向过载选取情况
在应用遗传算法之前,已经利用神经网络方法,分别得到了半斤斗翻转和半滚倒转中法向过载对末端状态影响程度的权重和阈值,也就是两个多元函数,遗传算法的作用就是研究末段速度和法向过载选取这两个函数关系的最值获取方法,从而得到使得半斤斗翻转改出速度最大和半滚倒转改出速度最小的操纵规律。
遗传算法的主要作用原理[12]:由染色体计算得到目标函数值之后,这些函数值按由好到坏的顺序排列,上一代群体中部分性能指标最优的个体不参与交叉运算和变异运算,而是直接带入下一代中,以此替换本代群体中经过交叉变异等操作后所产生的性能指标较差的个体,保证好的染色体得以保存下来,遗传多代之后,就可以得到良好的最值寻优效果。和传统优化算法相比是从整体上开始搜索,而不是从单个解的层面开始,覆盖面大,利于全局寻优,并且可以同时处理群体中的多个个体,对多个解进行评估,减少了陷入局部最优解的风险。使用遗传算法的基本过程如下。
(1)神经网络方法的拟合功能得到了斤斗类运动末端速度随操纵法向过载的变化规律,即末段速度与操纵过载的多元函数关系式,这也是遗传算法的适应度函数。
(2)斤斗类运动轨迹最优化问题转化成了一个求函数最值的问题,即如下数学规划模型:

(20)
式(20)中:x为决策变量,对应斤斗类运动中的过载;max minf(x)为目标函数式,对应神经网络提取权值和偏置之后末段速度随法向过载变化的多元函数关系;M⊂U表示约束条件,对应飞行中的法向过载约束,过载必须在一个合理范围内取值,满足上述约束条件的解称为可行解,M称为可行解集合。
(3)使用遗传算法对速度和操纵法向过载的函数关系式有约束条件下的最值进行搜索,遗传算法反馈回的最优解就是可以保证斤斗类运动边界性能最大的操纵规律。
4.2 遗传算法算例
4.2.1 半滚倒转操纵规律寻优
半滚倒转进入的高度为4 000 km,进入真速为600 km/h,法向过载选取如表1所示,x1至x5允许最小值均为3,最大值均为6。初始种群数为50,在第229代时,精度达到10-6,进化情况如图5所示。最后得到的最优染色体如表3所示。

图5 半滚倒转寻优遗传算法进化情况Fig.5 Evolution of genetic algorithms for split-s

表3 半滚倒转最优操纵方法
仿真结果表明,按文献[1]中的传统操纵规律,半滚倒转改出真速为806 km/h,按本文算法得到的规律操纵,改出真速为638 km/h,有效说明最优操纵规律可以使得改出半滚倒转的速度最小,避免改出速度超限。
从遗传算法进化得到的最优染色体可以看出,半滚倒转最佳的操纵方法是以较大法向过载进入,获得较大的转动角速度,然后适当减小法向过载。越过垂直面后,以大法向过载飞行,这样不仅可以减小速度,还可以防止高度下降过多,避免改出速度过大。
4.2.2 半斤斗滚转操纵规律寻优
半斤斗翻转进入的高度为2 000 km,进入真速为700 km/h,法向过载选取如表1所示,x6~x8的最小值为4,最大值为2,初始种群数为50。由于是对使得改出速度最大的操纵规律寻优,所以只需要在目标函数之前加一个负号即可。从进化结果可以看出,在第113代时,精度达到10-6,进化情况如图6所示。最后得到的最优染色体如表4所示。
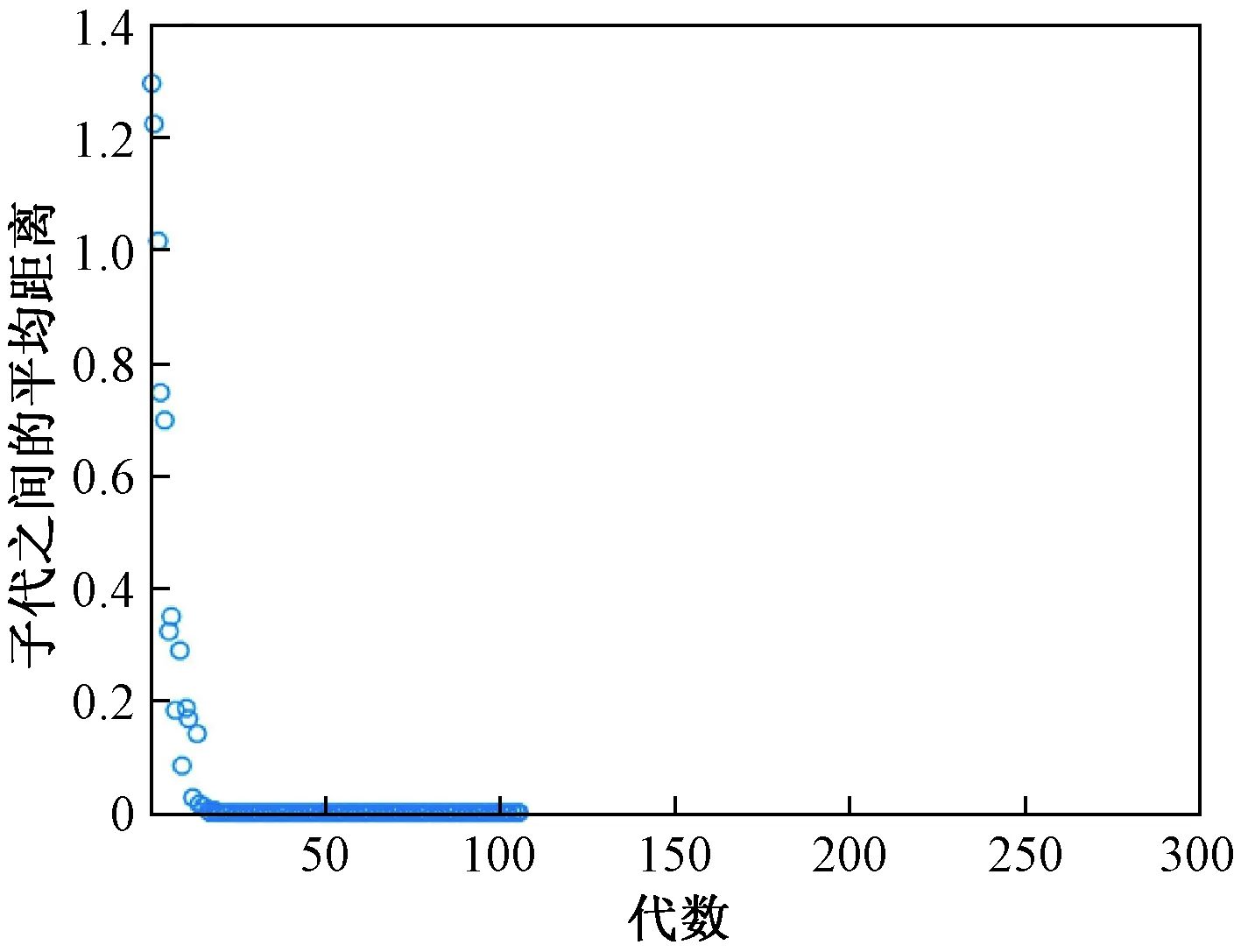
图6 半斤斗翻转寻优遗传算法进化情况Fig.6 Evolution of genetic algorithm for immelmann

表4 半斤斗翻转最优操纵方法
仿真结果表明,按表1方法,半斤斗翻转改出真速为386 km/h,按最优操纵规律,改出真速为408 km/h,说明优化后的操纵规律可以有效防止改出速度过小。
5 结论
根据军用飞机斤斗类机动的特点,建立了斤斗类机动数值积分计算模型,利用神经网络模型,得到了改出速度与操纵规律之间的多元函数关系。利用遗传算法,对多元函数进行寻优,得到了使半滚倒转改出速度最小和半斤斗滚转改出速度最大的操纵规律。得到了以下结论。
(1)在进行斤斗类机动数值积分计算时,对模型作出了合理简化和适当假设,但是仍然具有较高的精度,可以作为神经网络训练的合格样本。
(2)三层神经网络精度较高,可以对改出速度和操纵规律之间的函数关系进行预测。
(3)提取了神经网络的权值和偏置之后,就可以得到法向过载规律对改出速度影响的多元函数。遗传算法寻优方法可行,过程简便,效果良好,可以得到使得边界性能最大的操纵规律。
