基于博弈论组合赋权TOPSIS法的汽车碰撞危险态势评估
2020-05-07王金祥赵树恩杨其芝白田雨
王金祥, 赵树恩, 杨其芝, 白田雨
(重庆交通大学机电与车辆工程学院,重庆 400074)
随着汽车保有量的激增,安全、节能和环保将是确保汽车产业健康发展的永恒主题。影响道路交通安全的主要因素有驾驶员驾驶能力、车辆性能、道路条件及交通环境4个方面[1]。
许多学者针对汽车行驶危险态势评估方法做了大量的研究工作,并取得了较丰硕的研究成果。Katrakazas等[2]在交互感知运动模型和动态贝叶斯网络的联合框架下,提出一种将网络级碰撞估计与车辆实时风险判断相结合的风险评估体系,通过机器学习分类器对网络级碰撞进行实时预测,将预测结果纳入集成的贝叶斯模型中,实现对碰撞概率的实时预测。文献[3]提出一种基于概率的闭塞区域车辆潜在碰撞风险评估方法,通过对感知视场建模,将感知可见性的遮挡区域进行分类,并将所建立的视场模型应用于高精确地图中的道路几何形状,对可能发生碰撞的车辆进行运动预测,基于道路上车速的运动预测和概率模型对被遮挡车辆的碰撞风险进行概率评估。文献[4]针对高速公路行车安全问题,提出一种生成数据来拟合实时预测模型的方法,在基于贝叶斯网络场景模型的基础上,采用抽样的方法生成高风险的汽车场景,通过蒙特卡罗仿真估计碰撞风险,并利用真实和模拟数据训练神经网络自适应模型。吴斌等[5]提出一种基于自然驾驶数据的危险评估算法,该算法同时考虑紧急制动避障与转向避障措施对汽车行驶安全度的影响。汪澎等[6]考虑车辆行驶环境的复杂性及驾驶行为的多元性,提出一种BP神经网络与Dempster-Shafer证据推理技术相结合的车辆运行状态识别体系,提高了车辆行驶过程中的危险辨识精度。彭理群等[7]考虑多种对行车安全性产生影响的因素,采用粗糙集理论建立汽车碰撞危险态势评估规则,通过属性加权相似度实现了汽车碰撞危险评估问题。
传统的智能交通系统(intelligent transport system, ITS)中,汽车危险态势辨识中的信息来源绝大部分都是依赖于车载相机、激光雷达等单车车载设备,且评判标准比较单一,而当雨、雾、雪等恶劣天气时则会显著影响车载设备对数据采集的精确度,易造成错误的评估结果。综合考虑影响道路交通安全性的主要因素,将汽车碰撞危险态势评估问题视为混合多准则决策问题(multiple criteria decision making, MCDM),建立“人-车-路-环境”多层次汽车碰撞危险态势综合评价体系,并利用TOPSIS法建立汽车碰撞危险态势评估模型,将待评价样本与决策评估规则库样本的贴近度值进行对比、匹配,期望获得碰撞危险度等级。
1 汽车碰撞危险态势评估模型
态势感知是指在特定的时间和空间下,对环境中各元素或对象的觉察、理解以及对未来状态的预测[8]。近几年,车联网行业随着5G、自动驾驶等技术革新而得到快速发展,车用无线通信技术(vehicle to X, V2X)通信技术也得到了极大提升。V2X通信技术的成熟为行车过程中的关键安全信息的采集提供了新的方法,可大幅度改善道路交通安全度。
1.1 碰撞危险态势评估体系架构
从车路协同环境下多源信息采集及表达、风险评估两个方面,兼顾“人-车-路-环境”多层次的评价指标,建立汽车碰撞危险态势评估体系架构,如图1所示。
1.2 碰撞风险态势影响因素及评价指标
交通安全系统主要由人、车、路、环境4大部分构成,各部分既相互制约又相互关联。对行车过程中的碰撞风险态势影响因素进行多层次分析,并以此建立层次结构模型。
(1)驾驶员因素。驾驶员因素在道路交通安全中处于主导地位,驾驶员行为的正确与否对行车安全性有着重要的影响,同时也将驾驶员驾驶水平和持续驾驶时间作为驾驶员因素考虑。
(2)车辆因素。车辆自身整体运行性能是影响道路交通安全的重要因素。车辆行驶过程中,如果重要的安全部件出现故障,特别是高速状态下制动性能的失效将会导致恶性交通事故的发生。
(3)道路因素。文献[1]研究认为,交通事故的发生与道路条件有着密切的相关性,不同附着系数的路面对行车安全有着重要影响。湿滑路面下极易使车辆失控,造成恶性事故。
(4)环境因素。环境因素包括交通环境与天气环境。在天气环境方面,恶劣的天气环境会影响驾驶员及时获取正确的道路交通信息,从而对交通危险态势产生误判,进而影响到驾驶安全。在交通环境方面,交通流量增加时,行车环境逐渐变差,车间距会变小,影响行车安全。

图1 碰撞危险态势评估体系架构Fig.1 Collision risk situation assessment architecture
综上,汽车碰撞危险态势影响因素及综合评价指标如图2所示。

图2 汽车碰撞危险态势综合评价指标Fig.2 Comprehensive evaluation indexes of vehicle collision risk situation
利用量化知识对汽车碰撞危险态势评估要素的属性指标值进行量化,如表1所示。
汽车碰撞危险态势评估决策表由仿真实验与交通事故数据样本提取得到,根据样本中的评估等级d来验证基于博弈论组合赋权的逼近理想排序(technique for order preference by similarity to an ideal solution, TOPSIS)法对汽车碰撞危险态势评估的科学性和合理性,如表2所示。
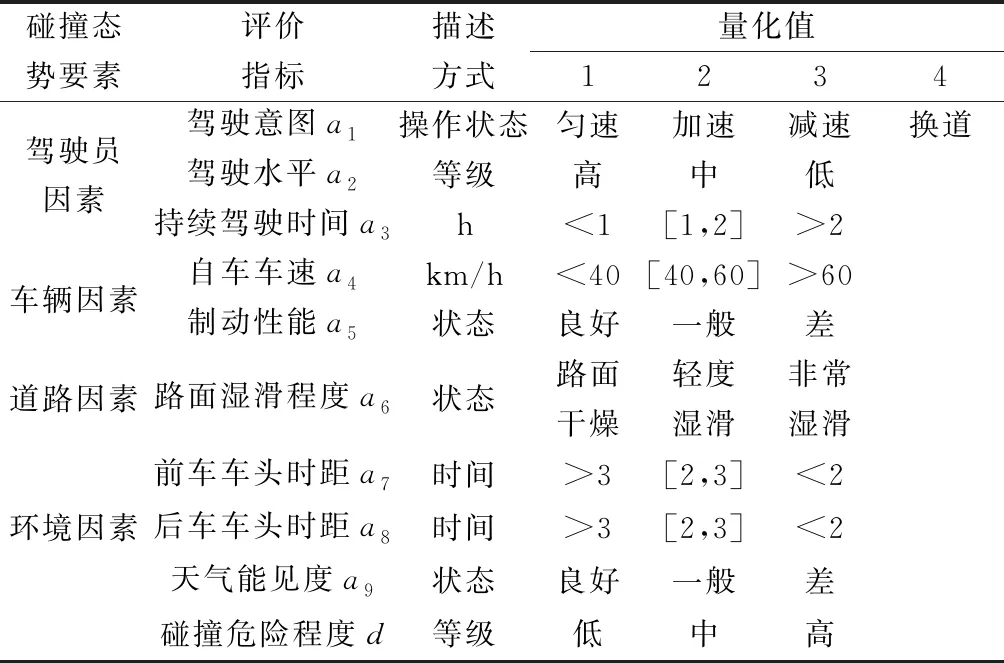
表1 评价指标量化规则
2 汽车碰撞危险态势评价指标赋权
2.1 构建碰撞危险态势评估决策矩阵
不同的指标具有不同的量程和量纲值,必须在同一评价体系中转换成统一的标准。
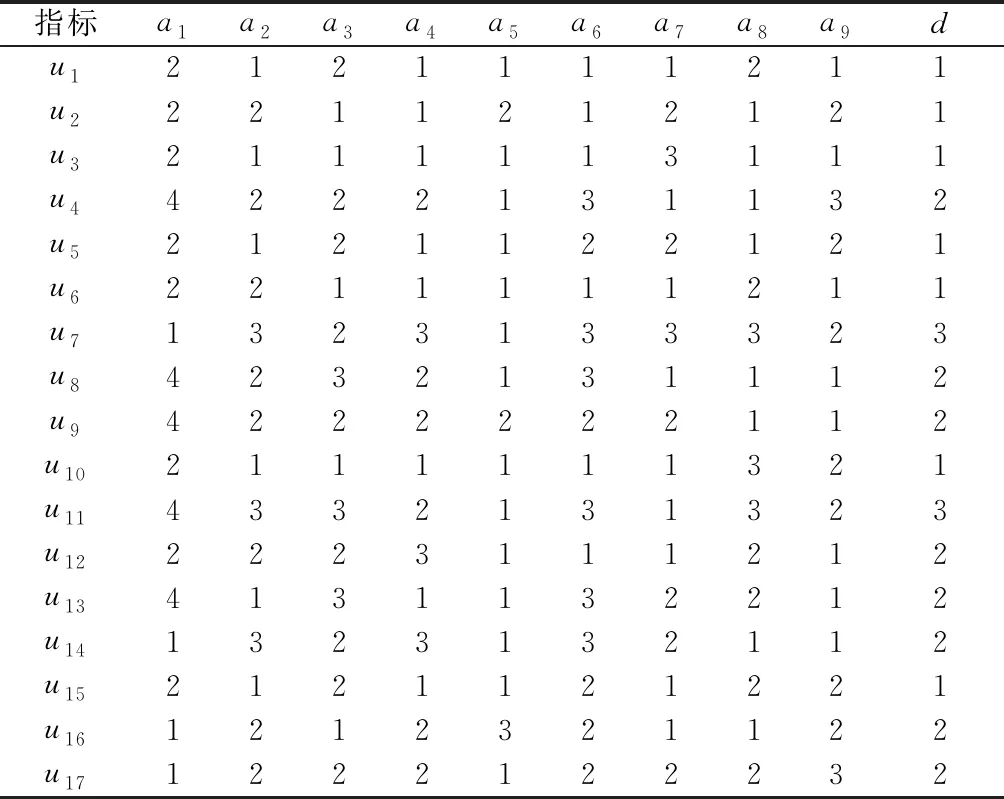
表2 评估决策信息表
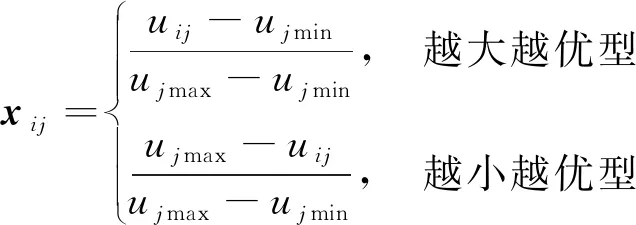
(1)
式(1)中:uij为第i个样本、第j个属性值;ujmax、ujmin分别为汽车碰撞危险态势评估指标中的最大值与最小值;xij为统一标准矩阵。

(2)
式(2)中:rij是xij正则化处理后的结果。
根据式(1)、式(2)对表2数据进行处理,构建初始决策评估矩阵为

2.2 汽车碰撞危险态势评价指标赋权
在对汽车碰撞危险态势的评估过程中,由于所选评价指标之间的相对重要度均不相同,因此对各评价指标进行科学、合理的赋权是实现准确评估汽车碰撞危险态势的关键。主观赋权法与客观赋权法是确定待评价指标权重的常用方法。在主观与客观评价的基础上,引入博弈论来确定汽车碰撞危险态势评价指标的组合权重值。
2.2.1 德尔菲主观赋权法
采用德尔菲法,利用专家的知识、经验和个人观点对汽车碰撞危险态势综合评价指标体系中各指标主观权重赋权。具体计算步骤如下[9]。
(1)计算专家意见集中度。根据本领域专家给出各指标权重aij和参与专家人数m计算得到各权重的算数平均值vj。

(3)
式(3)中:vj为对j方案全部评价的算数平均值。
(2)检验专家意见一致性。不同专家对碰撞危险态势评价指标的倾向性不同,直接以专家意见算数平均值作为评估结果可能会无法充分考虑到全部专家意见的一致性。采用Kendall法对专家评价意见一致性进行检验。
Kendall(H)=
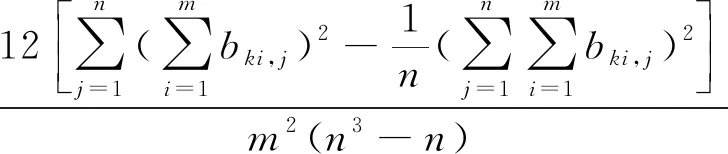
(4)
式(4)中:bki,j(1≤j≤n)为相应的aki,j在Aki中的排序号。
根据专家对评价指标的赋权结果构建各专家权重评价向量集,设Aki=(aki,1,aki,2,…,aki,n),同时确定每个评价指标在该向量集中的排序号向量Bk,i。
Bk,i=(bki,1,bki,2,…,bki,n)
(5)
(3)判断是否需要重新征询。由式(5)获得Kendall协和系数后,通过查表来对比、判断是否需要重新征询专家的主观评价意见。如果计算得到的Kendall协和系数大于表3中的Kendall协和系数显著性临界值,则认为满足专家意见一致性。否则需要重新征询专家对各指标权重的意见。
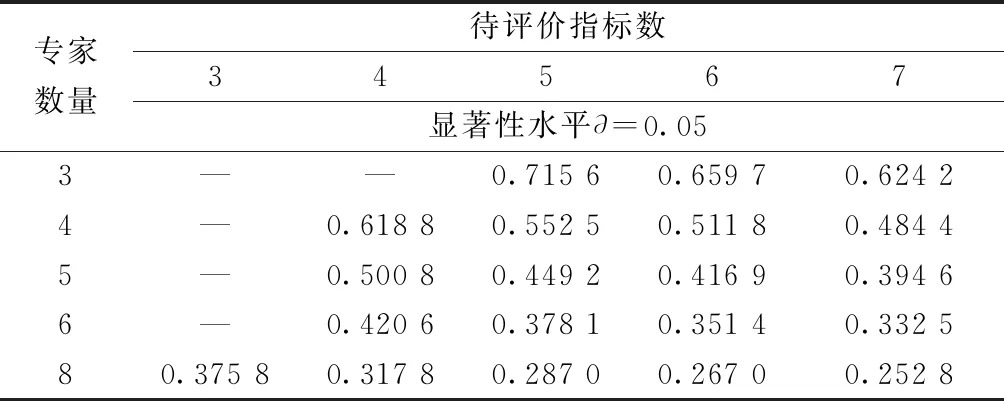
表3 Kendall协和系数显著性临界值
邀请8位相关领域的专家参与赋权,根据各专家赋权结果,利用式(3)~式(5)进行计算,满足一致性检验后得到危险态势评价指标主观权重向量C1=[0.074 3,0.083 3,0.113 8,0.120 8,0.149 6,0.073 2,0.156 1,0.079 5,0.149 4]。
2.2.2 熵权客观赋权法
熵权法属于完全的客观赋权法,根据评估决策信息表中数据差异性的变化,利用熵权法确定汽车碰撞危险态势评价指标的客观权重,其计算公式为[10]
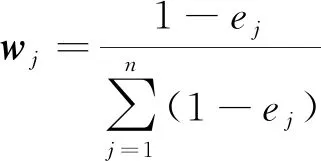
(6)
信息熵ej的计算式为

(7)
式(7)中:k=1/lnm,为调节系数。
根据式(6)、式(7)对碰撞初始决策矩阵进行熵权法计算,确定危险态势评价指标客观权重向量C2=[0.127 7,0.117 2,0.092 2,0.121 6,0.052 3,0.186 0,0.086 7,0.127 8,0.088 7]。
2.2.3 博弈论组合赋权法
主观赋权法能够反映各决策专家的意志,但不同的专家对不同的汽车碰撞危险态势评价指标具有不同的倾向性,会导致评价结果具有较大的随意性。客观赋权法根据评估决策信息表数据变化进行科学计算,有较强的数学理论依据,但评估决策表信息较少,计算的结果可能不完全符合实际。因此为了充分结合两者的优势,引入博弈论法将两者进行组合,利用数学规划方法使不同决策者之间的冲突以纳什均衡作为协调目标,寻找不同决策者之间的一致和妥协。计算过程如下[11]。
(1)向量线性组合。设共有L种方法用来确定组合权重,则

(8)
式(8)中:uk为构造的基本权重向量集;∂k为线性组合权重系数。
(2)确定优化组合系数。为了确定最优组合系数,可通过极小化u和uk之间的离差,对式(8)中L个权重组合系数进行优化处理来得到u中最理想的权重值,设目标函数为

(9)
根据矩阵微分性质,式(9)最优化的一阶导数条件的线性方程组为
(10)
(3)组合权重计算。对∂k进行归一化处理后,由式(11)确定汽车碰撞危险态势评价指标组合赋权的权重u*,即

(11)
由此,基于博弈论的组合赋权法将德尔菲法和熵权法计算的各指标权重科学结合,从而得到更均衡的综合权重。


表4 评价指标的各类权重值
3 基于TOPSIS法的汽车碰撞危险态势评估
将多因素影响下的汽车碰撞危险态势评估问题视为混合多准则决策问题,并采用TOPSIS法进行求解,将正理想解集设为样本中各评价指标中对行车安全最具威胁的解,负理想解集为各评价指标对行车安全最不具威胁的解,根据所求值的大小来进行评估排序。具体过程[12-13]如下。
(1)构建加权决策矩阵。
yij=riju*,i=1,2,…,m;j=1,2,…,n
(12)
(2)确定各评价指标的正、负理想解。

(13)
式(13)中:y+为指标的正理想点;y-为指标的负理想点。
(3)计算各评价指标值到正、负理想点的距离。各指标到正理想点和负理想点的欧式距离分别为
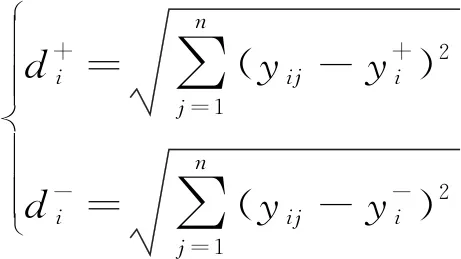
(14)
(4)计算相对贴近度评价安全等级。相对贴近度为

(15)
εi越大,汽车碰撞危险程度就越高。通过寻找与待评价样本贴近度值最相似的决策样本,即确定待评价样本的碰撞危险程度。
4 仿真分析
采用PreScan仿真软件搭建驾驶场景,对仿真实验中一段12 s的场景评估汽车行驶过程中的碰撞风险。如图3所示,在一个单向双车道上,评估对象为右车道中间蓝色SUV汽车。在初始时刻,设置目标车辆车速为40 km/h,与当前车道前车车头时距为3.6 s,与后车车头时距为1.5 s,车辆制动性良好,驾驶员驾驶水平等级为中,持续驾驶时间小于1 h。周围交通车辆匀速行驶,车速为40 km/h。设置目标车辆加速行驶,加速度为0.7 m/s2,在靠近前车时进行换道操作。

图3 仿真工况Fig.3 Simulation condition
参考文献[14],由式(16)计算得到车间安全距离阈值。图4所示为实际车间距与车间安全距离阈值。
Smin=0.058 96v+0.004 51v2+3
(16)
式(16)中:Smin为车间安全距离阈值;v为车速。

图4 实际车间距与安全阈值Fig.4 The actual distance and safety threshold between neighbouring vehicles
由图4可知,目标车进行加速操作,与前车距离逐渐减小,与后车距离逐渐增大,与前车的车间安全距离阈值逐渐增大。第6 s时,与前车的实际车距达到车间安全距离阈值。后车车速为匀速,与后车的车间安全距离阈值为定值。
分别设置良好环境与恶劣环境场景来验证提出的汽车碰撞危险态势评估方法的可行性。良好环境场景设置为路面情况良好,能见度良好。恶劣环境设置为路面情况非常湿滑,能见度一般。
选取3个关键场景进行验证。场景1为初始时刻。场景2为接近前车时刻,此时目标车辆进行加速操作,逐渐接近前车,直到与前车的时距为1.8 s,与后车的时距为2 s,车速为62 km/h。场景3为换道操作时刻,此时目标车进行换道操作,车速为60 km/h,与前车的时距为1.3 s,与后车的时距为2.5 s。3个场景量化值如表5所示。
利用TOPSIS法对3个关键场景的行车安全态势样本进行评估。根据式(12)~式(15)计算待评估样本与决策样本的贴近度。计算得到ε=[0.082 5,0.146 0,0.089 1,0.390 8,0.179 0,0.082 5,0.634 8,0.390 8,0.331 1,0.171 7,0.547 3,0.279 7,0.372 9,0.433 5,0.194 3,0.264 1,0.229 4,0.058 7,0.191 4,0.433 5,0.595 4,0.400 4,0.582 7]。

表5 3个关键场景评价指标量化
将图5中待评估样本u18~u23的贴近度值与评估决策样本u1~u17的贴近度值进行匹配,从而确定待评估样本的碰撞危险等级,如表6所示。
对整个12 s过程进行碰撞危险态势评估,评估结果如图6所示。
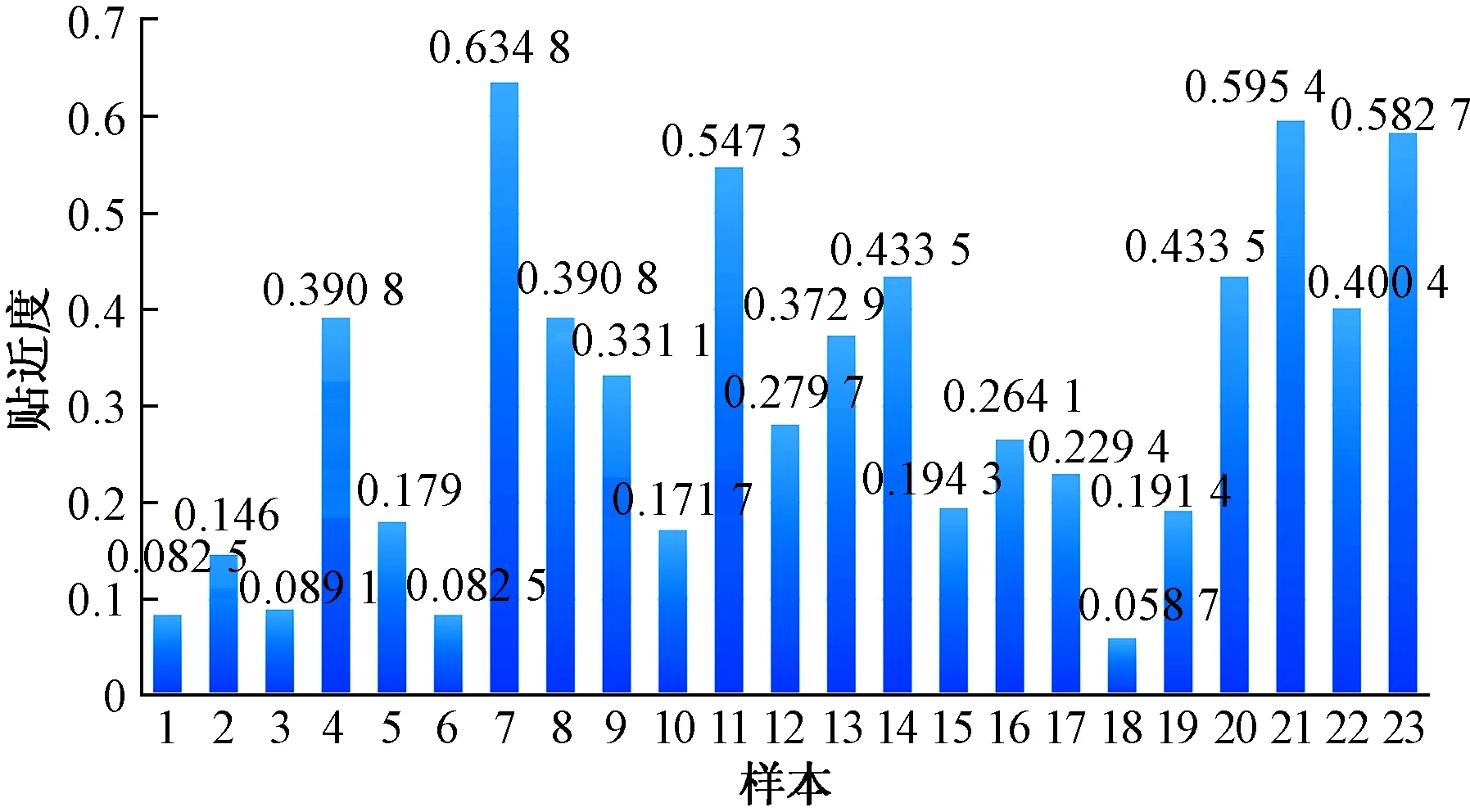
图5 3个关键场景贴近度值Fig.5 Closeness values of the three key scenes

表6 决策样本匹配与碰撞危险等级评估

图6 碰撞危险态势评价等级Fig.6 Collisionrisk situation assessment level
由图6可知,在良好条件下,前5 s由于未达到安全距离阈值,因此碰撞危险等级评估为低等级。从第6 s开始,实际车间距离达到安全距离阈值,此时等级评估为中等级。7~8 s实际车间距离小于安全阈值,因此评估等级为高等级。8 s后自车开始进行换道操作,但车间距离过小,因此评估等级降为中等级。10 s后换道结束,评估等级为低等级。
在路面非常湿滑且视线受到一定影响的恶劣条件下,由于初始速度较小,因此碰撞危险等级评估为低等级。进行加速操作则存在安全隐患,因此前5 s评估等级为中等级。当车速逐渐增大且实际车间距接近安全距离阈值时,碰撞危险等级评估相对于良好环境下提前达到高等级。进行换道操作后由于车速较高且与前车距离较小,因此危险等级在换道时仍为高等级。换道结束后与前车距离较远但车速较高,因此评估等级降为中等级。
5 结论
(1)综合考虑“人-车-路-环境”因素对汽车碰撞危险程度的影响,提出一种车路协同环境下的信息采集与表达方法,解决恶劣环境下单车车载传感器数据采集受限问题,更能适应复杂多变的道路交通环境。
(2)利用博弈论法将主观权重评价与客观权重进行科学组合,利用TOPSIS法建立了兼具主观性和客观性的汽车碰撞危险态势评估规则,辨识出的结果更加符合实际。
