基于超扭曲非奇异滑模的多电机协调控制
2020-05-07金涛涛
王 珏, 金涛涛, 张 军
(北京建筑大学城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
多电机同步协调控制是一类可为系统提供较大负载驱动和灵活运动方式的控制方式,目前已广泛运用于工程车辆、机器人、造纸、纺织、舞台设备等领域。多电机的协调控制其实质是确保多台电机间转速或位移同步。在实际工程应用中,多电机系统的协调控制性能会因为各电机转速不匹配、外部负载扰动等因素而降低[1]。因此,多电机协调控制在电机控制研究领域具有极为重要的研究意义。以公铁两用车[2]为被控对象,研究多电机系统的协调控制。
多台电机控制常用的几类电同步控制方式主要有并行同步控制、相邻交叉耦合和偏差耦合控制方式等。并行同步方式控制结构简单,同步精度较低[3]。相邻交叉耦合方式同步精度相对较高,但控制器只能控制相邻电机,4台及以下电机的系统难以达到理想精度,主要适用于电机数大于5的系统[4-6]。偏差耦合控制方式[7-8]通过单台电机实际转速与其他电机转速相对比,转角协同补偿器补偿每台电机的误差以实现多电机动态同步控制。因此,两用车转角控制选择偏差耦合控制方式,同步误差较低,系统鲁棒性好。
以偏差耦合作为电同步控制方式,多台电机难以兼顾系统的快速稳定性和同步性能,因此需要结合现代智能控制方式降低每台电机的跟踪误差,以实现降低多台电机的同步误差。何新霞等[9]研究了偏差耦合控制方式与模糊比例积分微分控制(proportional-integral-derivative control,PID)算法相结合,提高了多电机系统的精细控制,但对系统响应性能的提升有限。耿强等[10]基于偏差耦合控制结构与积分滑模控制器研究了多电机系统的同步控制,降低了系统的同步误差,但该积分滑模函数能否消解抖振现象并未提及。
针对公铁两用车转向系统中多电机偏差耦合控制方式难以同时提高系统的快速性、稳定性、鲁棒性的问题,提出一种可提高系统收敛速度的非奇异快速终端滑模函数[11],结合可降低系统抖振的超扭曲算法[12]设计了系统控制器,以期能提高多电机系统的控制精度和同步性能。
1 多电机转角偏差耦合控制器设计
1.1 永磁同步电机数学建模
研究对象为公铁两用车转向控制系统的多永磁同步电机(permanent magnet synchronous motor, PMSM)控制,建立电机的数学模型。通过Clarke变换和Park变换后的定子绕组各参数变为在d-q旋转坐标系下的数学模型。电机的电磁转矩可由公式推导得出,同时根据公铁两用车连续启停和转向精度高的特点,确定以id=0控制方式,作为电机的控制方式。

(1)

(2)

(3)
式中:Te为电磁转矩;Pn为PMSM极对数;φf为永磁体磁链,Wb;Ld、Lq分别为d、q轴电感,H,该系统中电感很小,可计为0;id、iq分别为d、q轴定子电流;U为系统电压,V;R为电机内阻,Ω;i为系统电流,A;ke为反电动势系数;N为齿轮减速比;ω为车轮旋转角速度,rad/s;J为电机主轴转动惯量,N·m;kt为电机扭矩系数;ks为弹簧阻尼系数;f为摩擦系数;θ为机械角度,(°)。
联立式(2)、式(3)可得:

(4)

1.2 偏差耦合控制方式
偏差耦合控制方式是目前多电机电同步控制方式中精度较高的一种方式,主要适用于系统电机数小于6的情况。对于多电机控制系统,可定义系统中第j台电机的跟踪误差为
ej=θ0-θj
(5)
式(5)中:θ0为电机的给定转角,(°);θj为第j台电机的输出转角,(°)。
在多电机转角同步控制的过程中,在既满足多台电机的误差e趋向于0的情况下,又要满足多台电机的跟踪误差尽量相等,即e1=e2=e3=e4。对于转角协同补偿器,其多台电机之间的转角关系式为θ1/u1=θ2/u2=θ3/u3=θ4/u4,可将控制系统的同步误差表示为
(6)
式(6)中:εji为第j台电机与系统其他电机的同步误差,i为第i个转角协同补偿器;ui为两台电机之间的同步耦合系数。
对公铁两用车多电机系统同步控制进行研究,将4台电机通过转角协同补偿器进行耦合,并实现偏差耦合控制。转角协同补偿器可对转角误差进行实时补偿,其主要功能就是求取4台电机转角误差的实时平均值,即
并将转角误差平均值给定控制器,实现转角的同步控制[13]。多电机耦合的协调控制结构如图1所示。

图1 公铁两用车多电机耦合的同步控制结构Fig.1 Multi-motor synchronization control structure for road-railvehicle
2 超扭曲非奇异快速终端滑模控制器
2.1 非奇异快速终端滑模函数设计
为了提高多电机控制系统的动态响应性能及鲁棒性,在多电机偏差耦合控制结构的基础上,提出一种新型非奇异快速终端滑模函数,可使滑模函数在系统平衡点附近比经典终端滑模函数以更快的速率收敛。该新型非奇异快速终端滑模函数可表示为

(7)
式(7)中:γ为系统参数;p、q为正常数,且1
滑模控制算法是为了能使状态变量在光滑滑模面上产生滑模运动,以实现控制的响应性和稳定性,则需要满足:
(8)


(9)
通过Lyapunov稳定性理论可知,所提出的非奇异快速终端滑模函数可以稳定收敛。
2.2 超扭曲算法控制器设计
由于滑模函数需要在滑模面内持续不停地切换,滑模控制算法在平衡点附近会发生抖振现象。为了避免抖振现象的出现,引入了超扭曲算法,使滑模变量隐藏在高阶导数内,可有效避免抖振。
超扭曲控制算法的非线性方程为

(10)
式(10)中:α=α(t)表示系统的状态变量;k1、k2为正常数;sgnα为α的符号函数。
通过超扭曲非线性方程,可得其滑模趋近控制律为

(11)
由式(8)~式(10)可得系统的控制律为

(12)


(13)
通过Lyapunov稳定性理论,证明提出的超扭曲算法非奇异快速终端滑模控制器系统可达稳定。
3 仿真结果与分析
为了进一步验证所提出的基于超扭曲算法非奇异快速终端滑模控制器在多电机控制系统中的可行性、有效性和使用性能,基于公铁两用车转向控制系统,利用MATLAB/Simulink搭建了4台永磁同步电机的控制仿真平台,对多电机系统进行了仿真。
对于系统内单台电机而言,提出的基于超扭曲算法非奇异快速终端滑模控制器可有效地实现以车轮转角为被控对象的快速控制。系统1号电机的响应曲线如图2所示。当给定信号为阶跃信号时,普通滑模控制器与超扭曲非奇异快速滑模控制器均无超调量,系统调节过程较为平稳。超扭曲非奇异快速滑模控制器在0.043 s时系统达到目标值并稳定收敛,普通滑模控制器在0.145 s达到目标值并收敛,稳态时间缩短了70%。在系统给定信号为方波信号时,超扭曲非奇异快速滑模控制器可在0.024 s内达到稳定,并可紧随信号波动,具有较好的跟随性能。普通滑模控制器难以在方波信号下实现稳定,系统稳定性、跟随性较差。

图2 1号电机转角变化曲线Fig.2 Angle change curve of No.1 motor
如图3所示,超扭曲非奇异快速终端滑模可在平衡点稳定收敛,几乎无转角误差,且未发生抖振现象,保持了系统控制的稳定性。普通滑模函数在系统稳定收敛后,仍有0.03°的误差,且有较大的系统抖振,并会出现波动,系统控制不稳定。因此,超扭曲非奇异快速滑模控制器具有更好的动态性能,系统无抖振现象,响应迅速、稳态精度高。
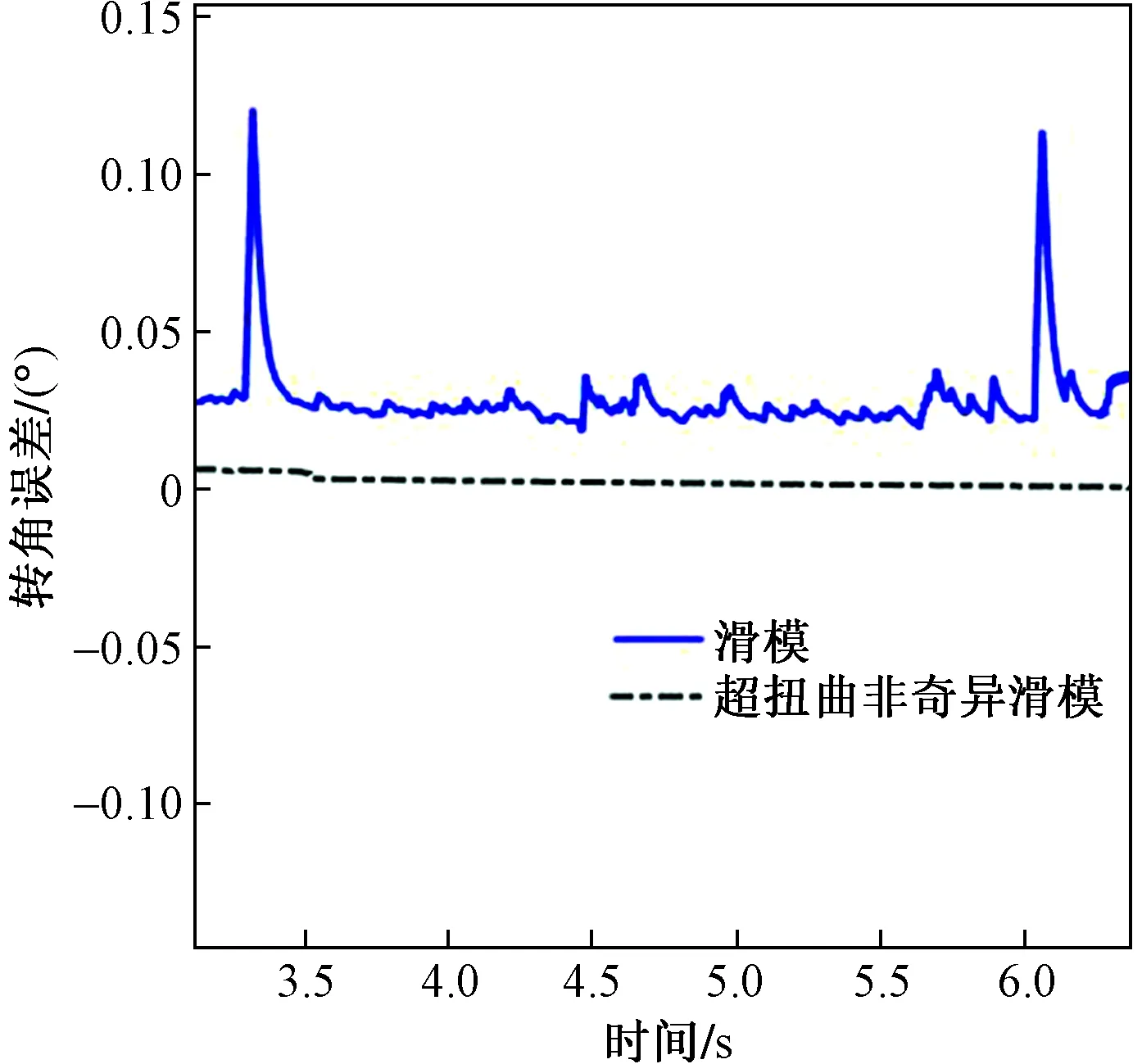
图3 系统消除抖振效果Fig.3 Eliminating buffeting effect
以1号、3号电机转向角为30°,2号、4号电机转向角为9.68°为例(图4),分析系统的同步误差。

图4 公铁两用车系统转向方案Fig.4 Road-rail vehicle steering scheme
对多电机转向控制系统,超扭曲非奇异快速滑模控制器使4台电机均能在对应的转向角度值稳定收敛,跟随精度较高。如图5所示,4台电机均在0.053 s时系统达到稳定且超调量较小,当系统1号电机在0.5 s时间处受到方波信号振动时,2、3、4号电机均会发生波动,且波动的幅度远小于1号电机,证明偏差耦合控制结构可使多电机处于协调控制状态,在某一电机受外界负载扰动时,2、3、4电机通过转角协同补偿器计算同步误差平均值的方式可有效增强系统的鲁棒性能和同步性能。普通滑模控制的4台电机均在0.164 s时系统达到稳定,响应速度较慢,且当系统内1号电机在0.5 s受到方波信号振动时,普通滑模控制难以实现稳定,其跟随性能和鲁棒性能差。
偏差耦合电同步控制方式可以使多台电机实现同步控制,且所提出的新型超扭曲非奇异快速滑模控制器显著提升了多电机系统的响应速度和稳定,所设计的多电机同步策略可以实现。
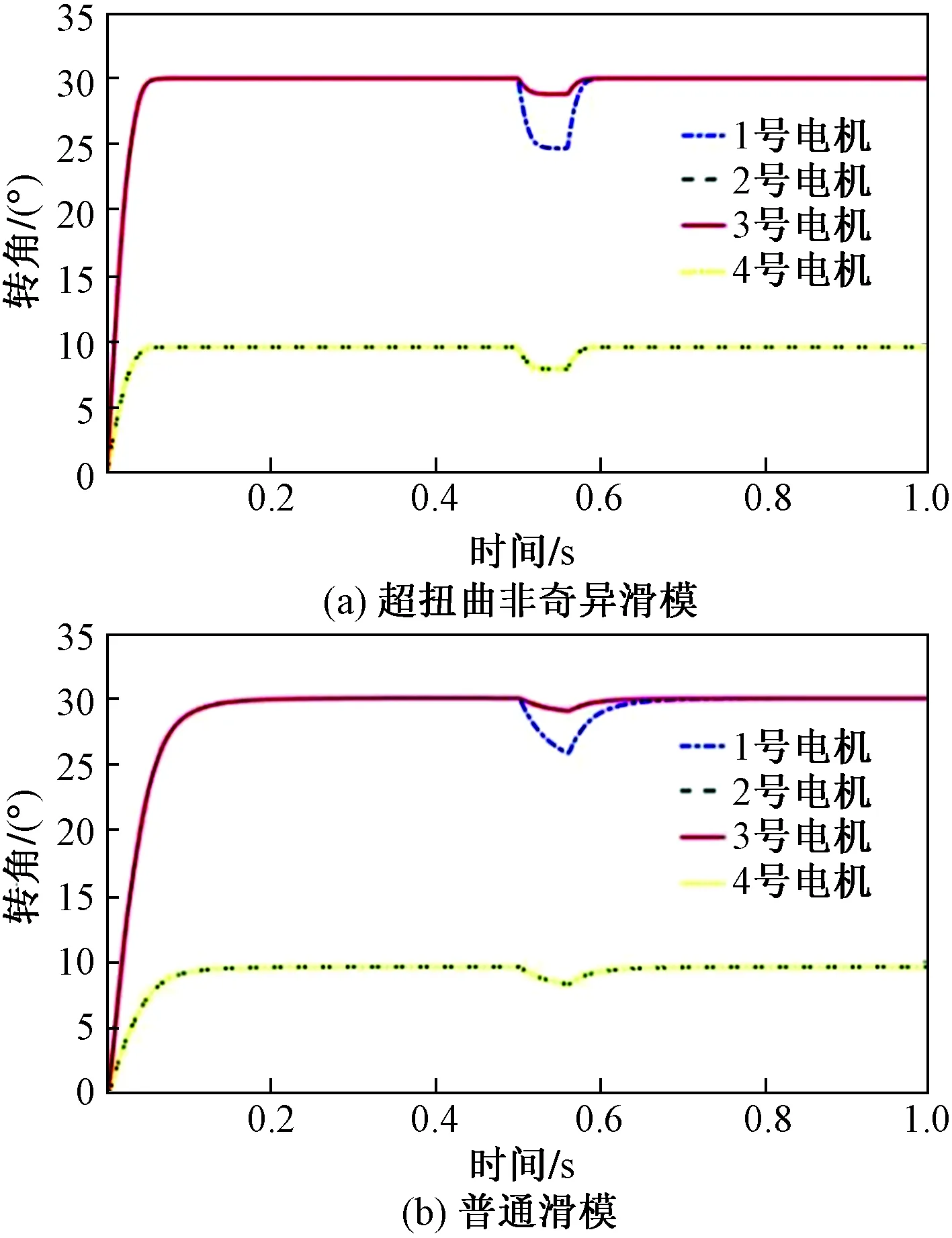
图5 多电机转角控制变化曲线对比Fig.5 Contrast of multi-motor angle control

图6 转角误差曲线Fig.6 Multi-motor angle error
系统在超扭曲非奇异快速滑模控制器控制下的转角误差如图6所示,多台电机在该控制策略下的同步误差会在很短的时间内收敛于0,且当系统受到方波信号的扰动时,系统可在0.024 s内达到稳定收敛,具有较强的响应特性和跟踪性能。
4 实验结果及分析
基于自主研发的纯电动公铁两用车平台,对多电机转向控制系统进行实车实验,实车搭载高精度绝对值编码器,可实现多电机转角精确控制及信号反馈。
公铁两用车为四驱四转型特种车辆,即由4个独立驱动电机与4个独立转向电机分别控制4个驱动轮。转向电机通过带动行星减速器及转向盘,实现牵引车的转向。公铁两用车电气控制系统主要由中央控制单元、显示触摸屏幕、牵引电机、牵引驱动器、转向电机、转向驱动器、牵引控制单元、转向控制单元以及外围一些执行机构组成。纯电动公铁两用车如图7所示。

图7 纯电动公铁两用车Fig.7 Electricroad-railvehicle

图8 多电机转角控制实车对比Fig.8 Real vehicle contrast of multi-motor angle control
在实车试验中,将超扭曲非奇异滑模算法和普通滑模算法作对比,并验证仿真试验效果,试验结果如图8所示。由图8(a)可知,对于系统的单台电机而言,超扭曲算法可明显提高转角控制系统的响应性,降低单台电机的跟踪误差,并能实现系统在达到稳定时间后,稳态精度较高,且没有系统抖振。
由图8(b)、图8(c)可知,对整车转向控制系统而言,超扭曲非奇异滑模算法相较于普通滑模算法,可使多电机系统更快地达到稳定,可有效提高系统的同步精度和多电机耦合精度,多电机转向系统的响应性和稳定性也得到了显著的提高。
通过公铁两用车的实车实验,证明所提出的超扭曲非奇异滑模算法可有效实现多电机协调控制,并能明显提高控制性能。
5 结论
(1)针对多永磁同步电机协同控制的要求,采用偏差耦合控制结构,提出一种新型超扭曲非奇异快速终端滑模面控制方法,实现了多电机转角的协同控制。
(2)为验证上述方法的有效性,基于MATLAB/Simulink平台搭建仿真模型,经仿真分析表明,新型超扭曲非奇异快速终端滑模面控制器可使单台永磁同步电机在阶跃响应下在0.043 s时系统达到稳定,并可使4台电机在0.053 s时系统达到稳定,并且稳态精度在10-3量级。
(3)基于自主研发的纯电动公铁两用车设计实车试验,验证两种算法在实际工程中的使用效果。试验证明,新型超扭曲非奇异快速终端滑模面控制器可能有效提高多电机控制的稳态精度、响应特性、跟随精度及同步精度,能满足公铁两用车多电机协同控制的使用要求。
