搬运助力外骨骼机器人运动学建模与仿真分析
2020-05-07张景帅钟佩思曹爱霞
张景帅, 钟佩思*, 刘 梅, 郑 义, 曹爱霞
(1.山东科技大学先进制造技术研究中心, 青岛 266590; 2.山东科技大学机械电子工程学院,青岛 266590;3.青岛黄海学院智能制造学院,青岛 266427)
助力外骨骼机器人是以将人类的“智力”与机器人的“体力”相结合的思想,通过人去控制机器,从而减轻人的作业负担,能够完成仅靠人的自身能力不能独立完成的任务。
目前中国鲜有研究机构开发出全身助力外骨骼机器人系统及产品,现有的外骨骼机器人研究或者产品大都是针对下肢、上肢或者单关节的外骨骼系统,且尚未形成成熟的产品。而发达国家研制的外骨骼机器人产品价格昂贵[1],如美国加州大学伯克利分校研制的BLEEX下肢外骨骼机器人[2]、美国洛克希德·马丁公司的HULC外骨骼[3]、美国雷神公司的XOS2 机器人[4]、日本筑波大学研制的HAL助力外骨骼[5-6]、以色列研制的ReWalk 产品[7]等。阿尔及尔高等军事理工学院研制的5自由度上肢主动外骨骼在肘关节多加了一个外展/内收自由度,增大了手臂的工作空间,但增加了建模和求解的难度[8]。中国科学院大学研发的全身助力外骨骼机器人系统,对下肢和上肢进行正逆运动学建模,但只考虑了在矢状面内的分析且缺少上肢的仿真分析,不能准确描述出外骨骼的运动自由度[9]。电子科技大学研发的下肢助力外骨骼建立了自然行走、起立蹲下等各运动过程的简化模型,但只考虑了在矢状面内的分析[10]。因此,研制一款结构合理与运动灵活的搬运助力外骨骼机器人。现着重介绍外骨骼的结构设计以及在3个平面内的运动学建模与仿真分析,这对于更好实现外骨骼辅助人体完成搬运托举动作、提高控制精度和助力性能非常重要。
1 搬运外骨骼机器人运动学建模
1.1 搬运助力外骨骼机器人结构设计
搬运助力外骨骼机器人主要包括外骨骼四肢、背架、腰部、外骨骼鞋以及安装在髋关节、膝关节、肩关节和肘关节的驱动装置。结构设计如图1所示。

图1 搬运助力外骨骼机器人结构设计Fig.1 Structural design of transporting power-assisted exoskeleton robots
外骨骼机器人髋关节和肩关节各3个自由度,膝关节和肘关节各1个自由度,踝关节2个自由度,符合人体相应关节的自由度,穿戴外骨骼后能够灵活地完成搬运托举工作。在搬运托举过程中,人体主要受力关节为髋关节、膝关节、肩关节和肘关节,为节约成本、简化结构,只在主要受力关节处设置驱动装置。
外骨骼四肢各关节的运动大部分是发生在矢状面内,其他2个平面上的运动幅度相对较小,为方便外骨骼机器人的运动学建模与分析,只需要考虑在矢状面内的若干个自由度。
1.2 搬运助力外骨骼机器人下肢运动学建模
1.2.1 连杆参数确定及坐标系的建立
在建立运动模型时,首先需要确定各个关节的坐标系,再依据其各部分尺寸数据,得到D-H参数,如表1所示。
以下肢外骨骼的左侧为研究对象,建立外骨骼机器人各连杆的D-H坐标系,如图2所示。

表1 下肢外骨骼D-H参数Table 1 D-H parameters of lower extremity exoskeletons

图2 下肢外骨骼D-H法坐标系Fig.2 D-H coordinate system of lower extremity exoskeleton
1.2.2 运动学方程建立及正运动学解
外骨骼机器人可视为由一系列连杆通过关节连接而组成,利用齐次变换矩阵来表示连杆在基坐标系中的位姿。机器人相邻两杆之间的变换通过4步得到:从i-1系到i系的变换,可令i-1系绕xi-1轴旋转αi-1角,再沿xi-1轴平移ai-1,然后绕zi轴旋转θi角,最后沿zi轴平移di,使得i-1系与i系重合[9]。
Rot(z,θi)×Trans(0,0,di)=
(1)
将表1中参数代入式(1)可得到各连杆间的齐次变换矩阵为
踝关节外展/内收自由度的运动范围很小,可以忽略,因此每条腿可以只考虑5个自由度。则下肢助力外骨骼机械腿末端相对于刚性腰带中心的变换矩阵为

(2)
式(2)中:
px=(c1c2c3c4-s1s3c4-c1s2s4)a4+c1s2d3-s1d2;
py=(s1c2c3c4+c1s3c4-s1s2s4)a4+s1s2d3+c1d2;
pz=-(c2s4+s2c3c4)a4+c2d3。
式中:s1代表sinθ1;c1代表cosθ1;s2代表sin(θ1+θ2),其他类似。
为验证运动学正解的方程是正确的,将初始位置坐标θ1=0°、θ2=-90°、θ3=0°、θ4=-90°、θ5=0°,代入式(2),得到px=-a4-d3、py=d2、pz=0。这跟人体直立状态的位姿相同,说明下肢外骨骼的运动学正解是正确的。
1.2.3 运动学方程建立及逆运动学解
求解运动学逆解可采用左乘各变换矩阵的逆矩阵的方法将各关节转角θi单独分离出来,进而得到各变量的值。
(3)
令方程左右两端元素(1,4)(2,4)(3,4)对应相等得:
c1c2px+s1c2py-s2pz=c3c4a4
(4)
-c1s2px-s1s2py-c2pz=s4a4
(5)
-s1px+c1py+d2=s3c4a4
(6)
将式(4)、式(5)、式(6)平方求和可得:
求解得:

atan2(py,-px)。

θ2=atan2(az,ays1-axc1);

θ5=atan2(nz,oz)+
1.3 搬运助力外骨骼机器人上肢运动学建模
1.3.1 连杆参数确定及坐标系的建立
由连杆变换规律和结构设计中的参数得上肢外骨骼的D-H参数,如表2所示。

表2 上肢外骨骼D-H参数Table 2 D-H parameters of upper extremity exoskeletons
建立杆件坐标系,获得上肢外骨骼的 D-H 模型,如图3所示。
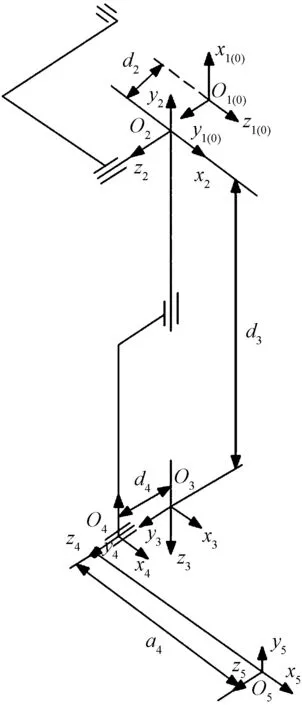
图3 上肢外骨骼D-H法坐标系Fig.3 D-H coordinate system diagram of upper extremity exoskeleton
1.3.2 运动学方程建立及正运动学解


(7)
求解运动学方程得到式中各参数为
末端坐标系相对于坐标系4的变换矩阵为
则末端坐标系原点O5相对于基坐标系O0的位置为
护理前两组血糖餐前餐后监测状况、酸中毒症状积分、生存质量接近(P>0.05);护理后综合护理干预组血糖餐前餐后监测状况、酸中毒症状积分、生存质量的改善幅度更大(P<0.05)。见表 2。
(8)
将θ1=0°、θ2=-90°、θ3=0°、θ4=0°、θ5=0°代入式(7)和式(8),得:
(9)
求出末端姿态在基坐标系中的位置,与图中初始位置姿态完全一致,从而验证了正解的正确性。
1.3.3 运动学方程建立及逆运动学解
由于末端坐标系的关节变量θ5=0°,只对θ1、θ2、θ3、θ4进行解求。具体步骤如下。
(10)
令方程左右两端元素(1,4)(2,4)(3,4)对应相等,得:
c1px+s1py=-c2s3d4+s2d3
(11)
-s1px+c1py=c3d4+d2
(12)
pz=s2s3d4+c2d3
(13)
同理可得:

(14)
式(14)中:
2 搬运外骨骼机器人运动学仿真分析
在 Pro/E 环境中建立的人机三维模型另存为Parasolid 格式导入动力学软件 ADAMS 中,在 ADAMS 环境中编辑各个零件的属性,添加各种约束和驱动[11]。为降低仿真分析难度,避免出现分析过程中卡死现象,分别对搬运助力外骨骼机器人下肢和上肢进行运动学仿真分析。
2.1 搬运外骨骼机器人下肢运动学仿真分析
为简化仿真,髋关节与膝关节的屈/伸关节设置为主动驱动,踝关节的屈/伸关节设置为被动驱动,髋关节内收/外展和旋内/旋外、踝关节内收/外展设置为固定约束。
虚拟模型的运动控制需要知道各个关节角度变化规律。在 ADMAS 运动学控制中,最常用的控制函数为 STEP 函数,基本格式为STEP(x,x0,h0,x1,h1)[12]。在髋关节与膝关节处施加驱动函数,如右髋关节驱动函数设置为STEP5(time,1.12,0,1.8,-62 d)+STEP5(time,1.8,0,2.63,67 d)+STEP5(time,3.43,0,4.23,-63 d)+STEP5(time,4.23,0,5.09,63 d)+STEP5(time,5.79,0,6.5,-56 d),其余关节驱动函数类似。通过添加驱动,完成人机外骨骼虚拟样机的建立,如图4所示。
通过Adams中的Simulation工具条,设定仿真时间为10 s,仿真步长为5 000,运行仿真计算后,得到人机外骨骼仿真模型的联合行走,如图5所示。

图4 人机外骨骼仿真模型Fig.4 Man-machine exoskeleton simulation model

图5 人机外骨骼仿真模型联合行走Fig.5 Man-machine exoskeleton simulation model combined walking
通过仿真处理模块Postprocess将数据导出,在Origin中得到大腿与小腿质心的位置与速度变化曲线,如图6~图8所示。由图可知,行走过程中,外骨骼大腿质心前后位置运动曲线的变化规律相同,呈有规律的阶梯状同步上升;其上下位置运动曲线的变化规律也相同,呈有规律的同步跳动;其速度变化曲线有相同的变化规律,大腿质心在上下方向的速度大小相近,在前后方向的速度大小差距较大。这符合人体行走特征。小腿变化曲线与大腿相似。仿真结果表明,下肢外骨骼能够满足人体运动,其运动学建模与分析方法正确合理。

图6 外骨骼左、右大腿质心前后位置变化曲线Fig.6 Change curve of exoskeleton left and right thigh centroid front and back position
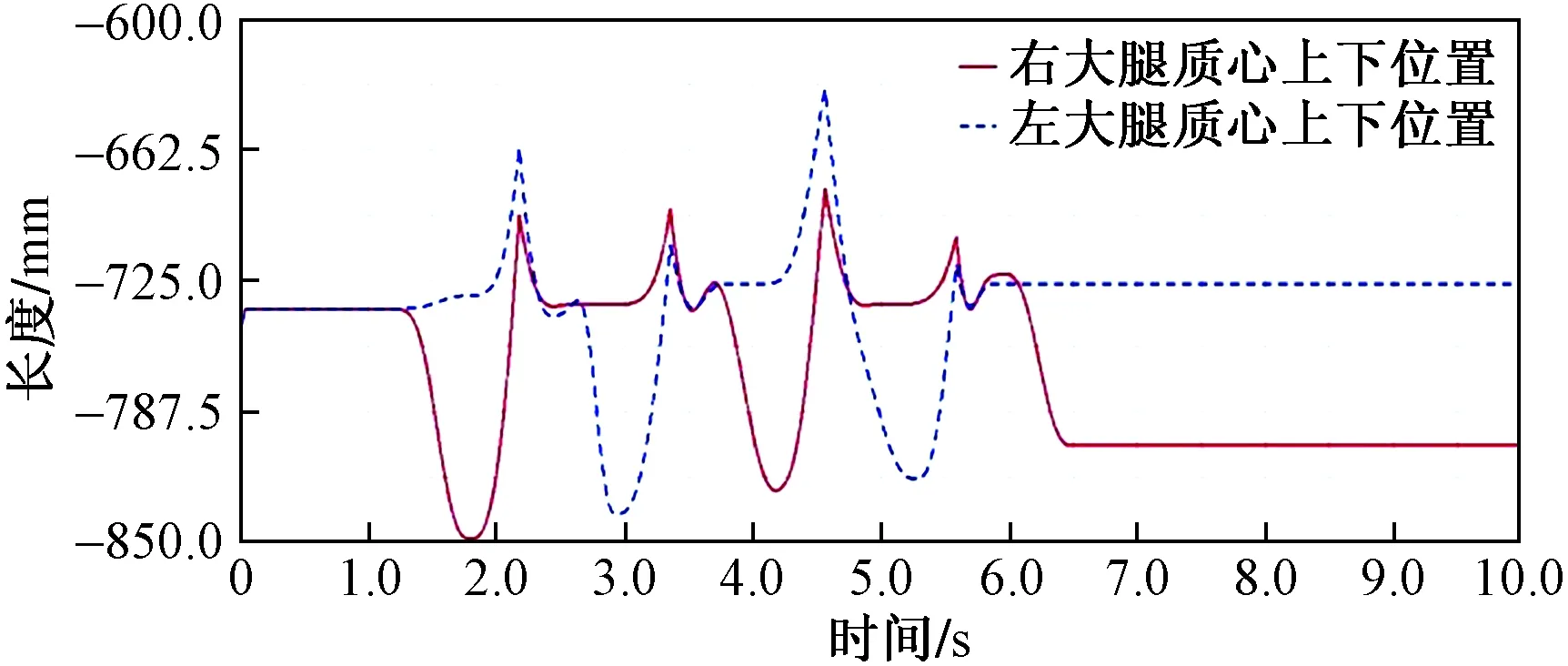
图7 外骨骼左、右大腿质心上下位置变化曲线Fig.7 Change curve of exoskeleton left and right thigh centroid upper and lower position
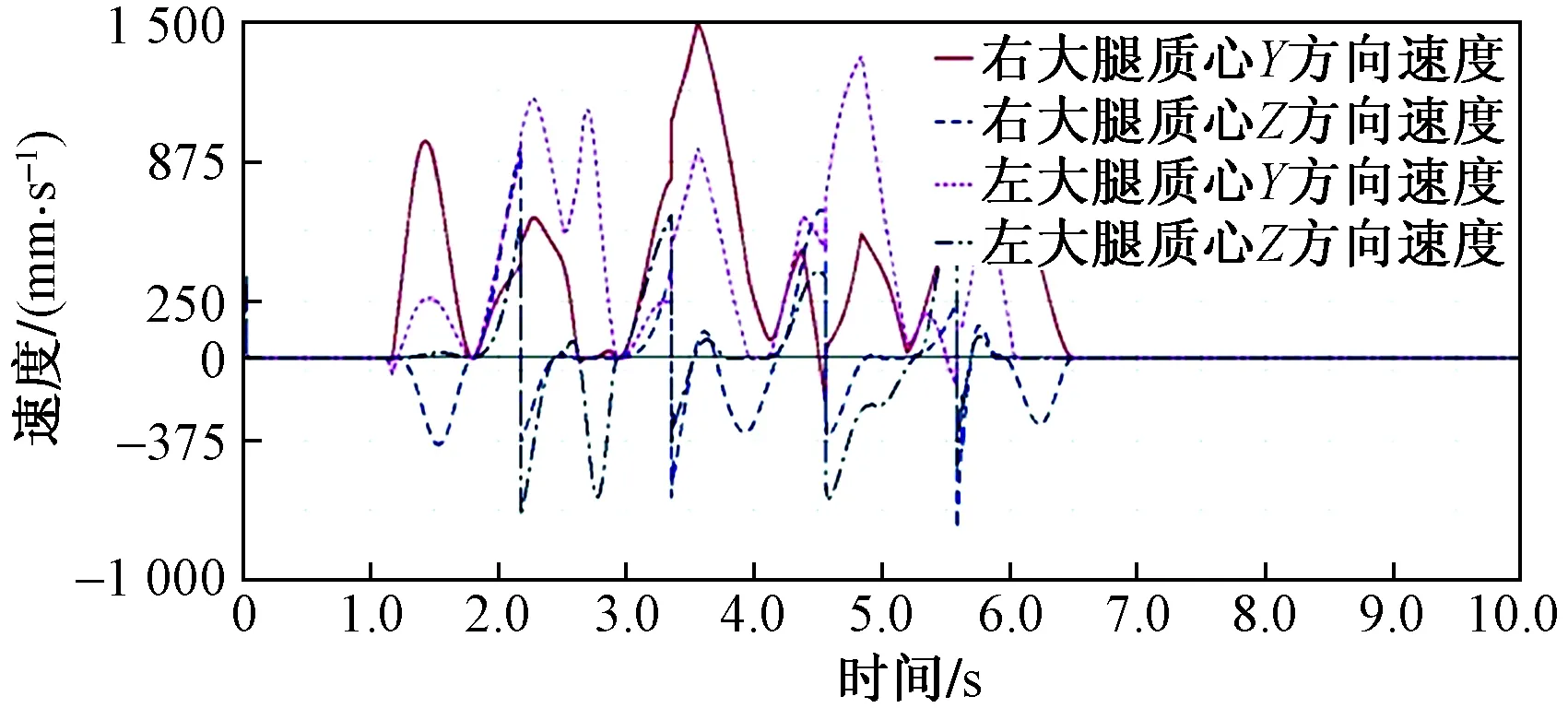
图8 外骨骼左、右大腿速度变化曲线Fig.8 Velocity change curve of exoskeleton left and right thigh
2.2 搬运外骨骼机器人上肢运动学仿真分析
因搬运工作主要作用在矢状面内,为简化仿真,将上肢肩关节与肘关节的屈/伸关节设置为主动驱动,肩关节内收/外展和旋内/旋外设置为固定约束。因左右臂对称,只对右臂进行仿真分析。考虑极端情况,仿真设置的运动范围比实际抬起重物的运动范围大,上肢外骨骼仿真模型的初始位置,上臂与竖直成15°,前臂与上臂平直,如图9所示。
施加在肩关节与肘关节的驱动函数如下:右肩关节为Step(time,0,0 d,1,-20 d)+Step(time,1,0 d,8.6,0 d)+Step(time,8.6,0 d,10,-55 d),右肘关节为Step(time,0,0 d,2,-55 d)+Step(time,2,0 d,8,0 d)+Step(time,8,0 d,10,55 d)。运行仿真后,得到上肢外骨骼搬运的仿真过程,如图10所示。

图9 上肢外骨骼仿真模型Fig.9 Upper extremity exoskeleton simulation model
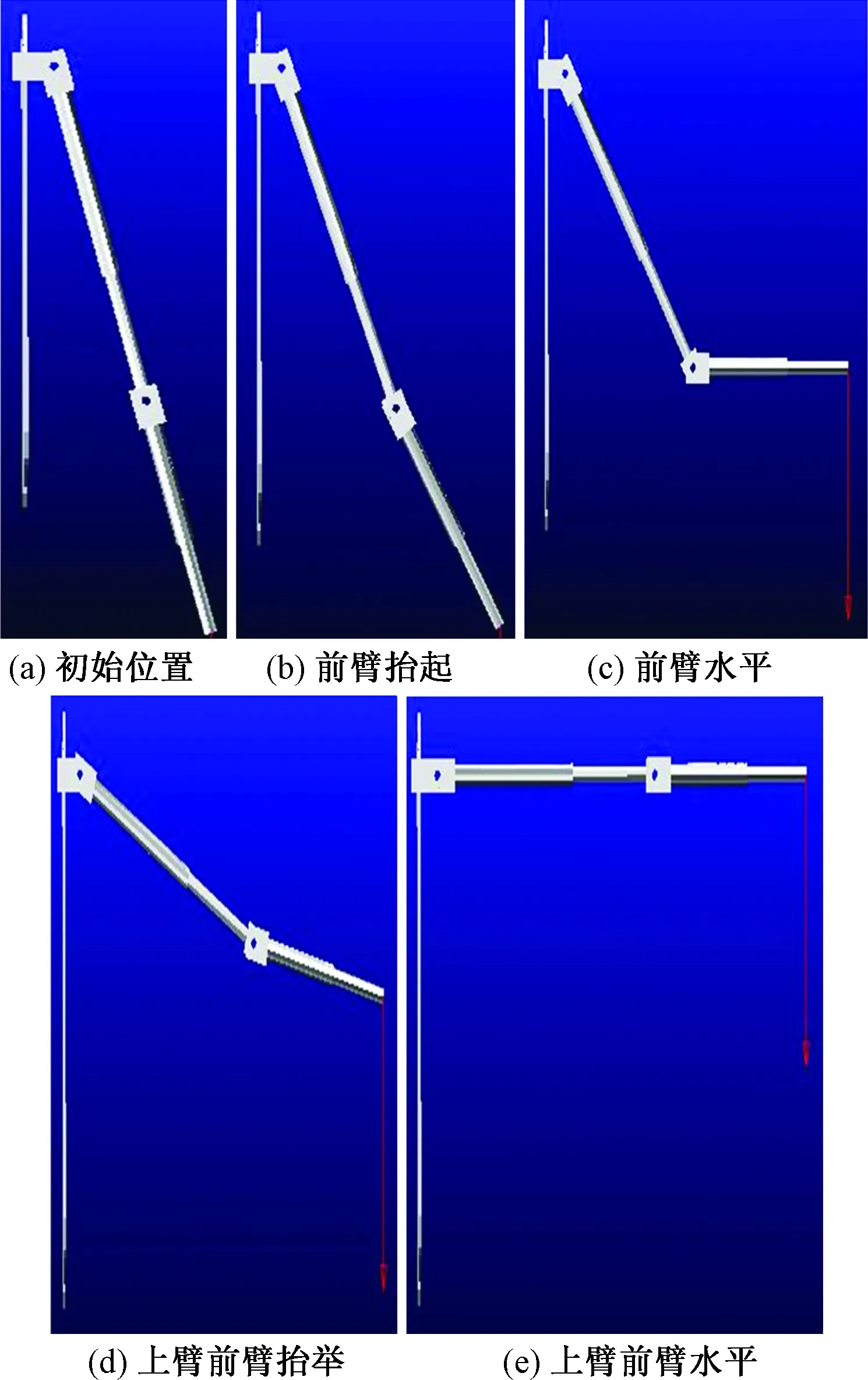
图10 上肢外骨骼搬运仿真过程Fig.10 Simulation of upper extremity exoskeleton transportation
数据处理后得到上臂与前臂质心的位置与速度变化曲线,如图11~图13所示。

图11 上臂与前臂质心前后位置变化曲线Fig.11 Change curve of upper arm and forearm centroid front and back position
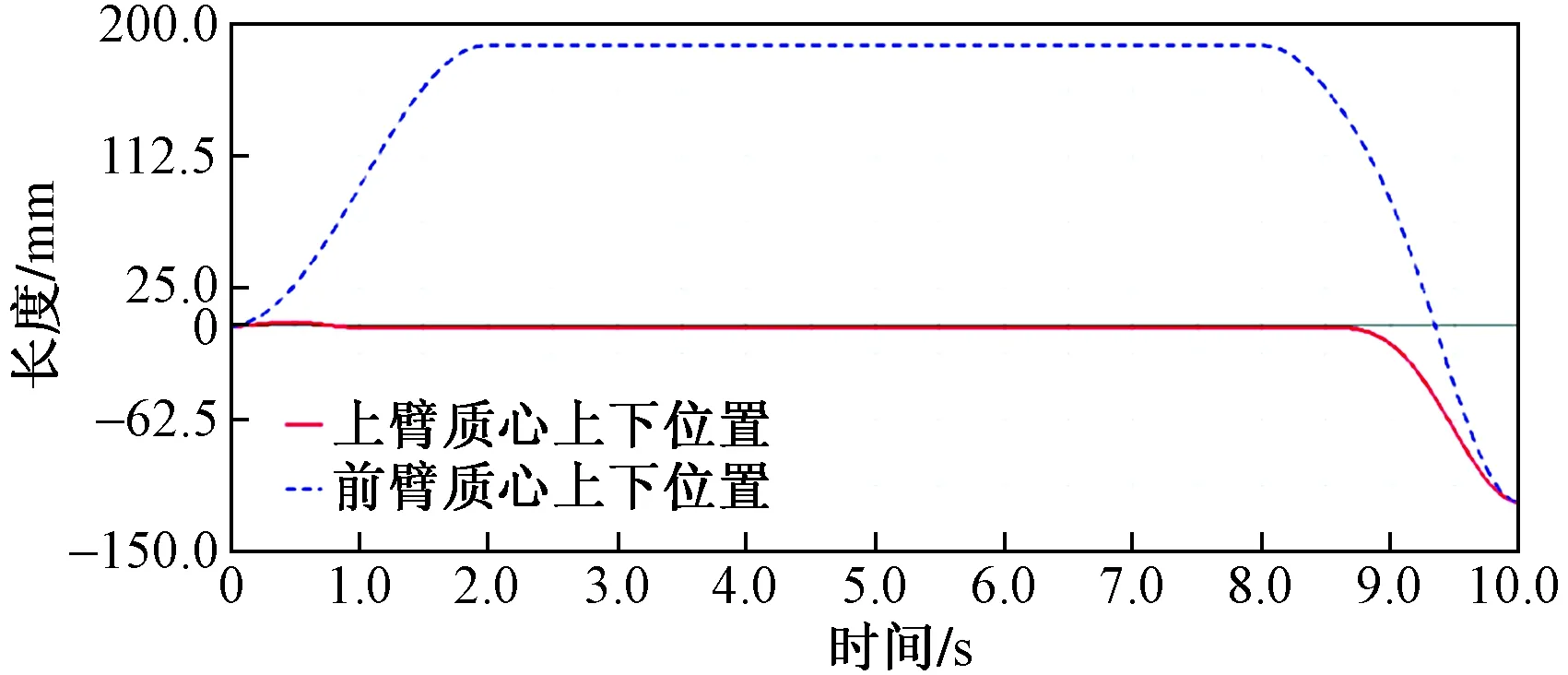
图12 上臂与前臂质心上下位置变化曲线Fig.12 Change curve of upper arm and forearm centroid upper and lower position
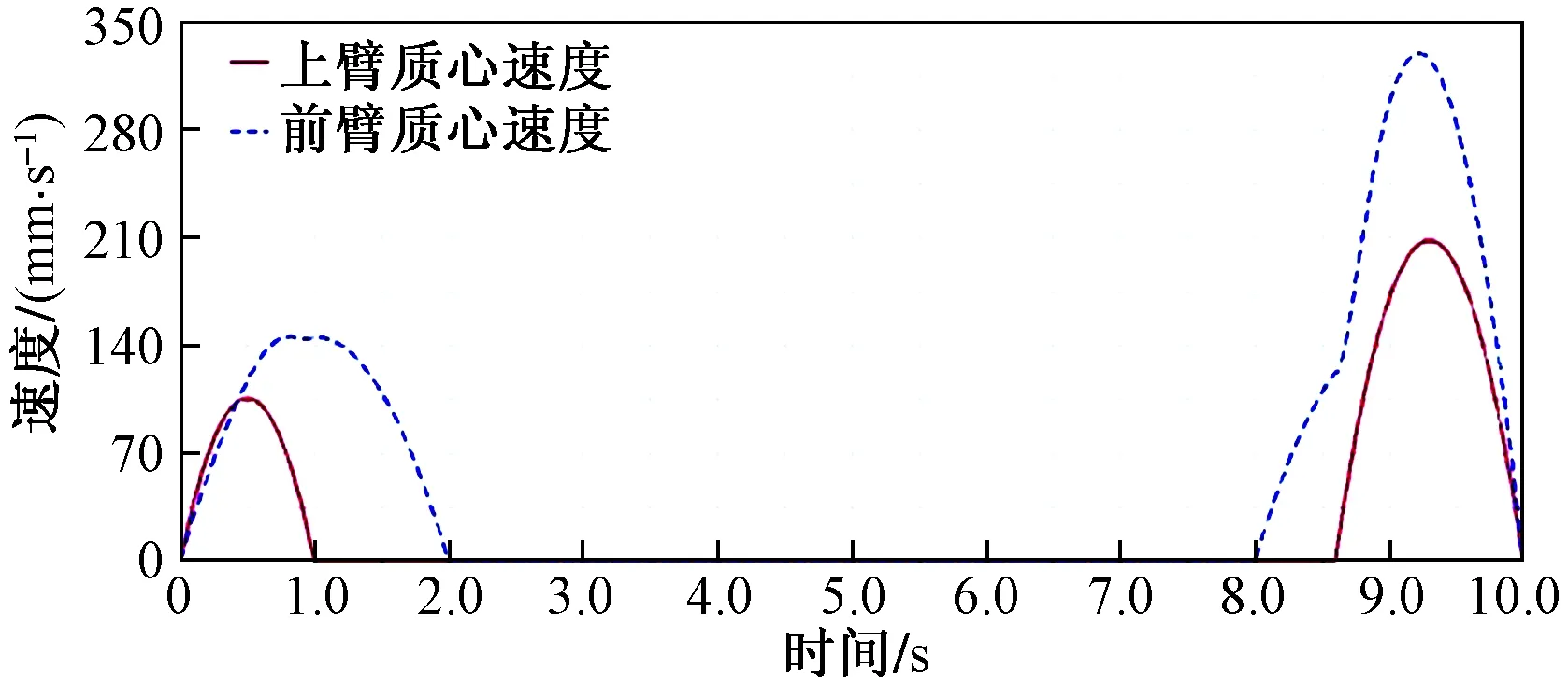
图13 上臂与前臂质心速度变化曲线Fig.13 Velocity change curve of upper arm and forearm centroid
在搬运托举物体的过程中,一般分为搬、运和托举3个阶段。在搬物体的过程中,外骨骼上臂和前臂质心前后位置增大,上臂质心上下位置不变,前臂质心上下位置增大,上臂和前臂质心的速度变化曲线规律相似;在运物体的过程中,外骨骼上臂和前臂质心的前后位置、上下位置变化曲线和速度变化曲线保持不变;在托举物体的过程中,外骨骼上臂和前臂质心前后位置增大,上臂质心上下位置反向增大,前臂质心上下位置减小至零后反向增大,两者在仿真结束时重合,上臂和前臂质心的速度变化曲线规律相似。这符合人体搬运托举物体的特征。仿真结果表明,上肢外骨骼能够满足搬运托举物体,其运动学建模与分析方法正确合理。
3 结论
设计了一款结构相对简单、能够有效辅助工作人员的搬运助力外骨骼机器人,针对所设计的结构,分析外骨骼的工作机理并阐述了其结构设计中需考虑的问题。利用坐标变换和D-H法对其进行正逆运动学分析,得到了运动学分析结果。利用三维设计软件Pro/E和动力学仿真软件ADAMS对其进行了建模和运动学仿真分析。仿真结果与理论分析结果基本一致,验证了理论分析的正确性,为搬运外骨骼助力机器人的运动研究提供了重要参考。
