下肢站立康复训练装置运动轨迹联合仿真分析
2020-05-07陈岱民韩舒宇
陈岱民,韩舒宇
(长春大学 机械与车辆工程学院,长春 130022)
由于身体机能衰退,心脑血管疾病和神经系统疾病的老年患者逐渐增多,其中脑卒中患者占比较大,很多人肢体偏瘫、甚至截瘫。随着老龄化的加剧,国内外学者越来越重视下肢运动功能障碍患者的康复问题[1]。2011年,韩国延世大学Inho Kim等人针对老年人和残疾人研制了一种坐-站转换的机器人系统“Smart Mobile Walker(SMW)”,通过对该系统进行运动学分析,确定了SMW辅助老年人和残疾人坐-站转换康复运动的最佳运动轨迹[2]。2012年,美国凯斯西储大学的Thomas C.Bulea研制了一款用于下肢部分肌肉瘫痪患者的垂直升降式助行器,由双边气弹簧提供垂直升力使患者完成纯垂直运动,该力大约为体重的80%,可辅助患者完成从坐姿到站立的康复训练[3]。2014年,合肥工业大学的倪军针对中风偏瘫患者设计了一种新型坐姿下肢康复机器人,基于运动学分析利用ADAMS建模仿真验证了该机器人可满足不同身高患者的使用要求[4]。2016年,南京理工大学的张建云针对下肢行走功能障碍患者设计开发了一款移动式新型步行康复训练机器人,并设计了机器人控制系统,可实现步行康复训练功能[5]。针对下肢运动功能障碍患者的站立康复问题设计了一款下肢站立康复训练装置,通过控制系统与机械系统联合仿真验证患者能否按照人体站立实际运动轨迹平稳地实现站立康复训练动作,满足不同患者的站立训练要求。
1 下肢站立康复训练装置的机械结构
基于下肢站立的康复训练装置,目的是通过控制系统驱动机械结构实现下肢功能障碍患者按照规划的运动轨迹完成站立康复训练,期望帮助患者恢复下肢运动机能。由于下肢运动功能障碍患者在进行站立康复运动时,要求整个过程能够平稳完成,在进行结构设计之前,需要对康复训练装置提出具体的设计要求,那么根据目前国内外康复训练装置的使用性能要求、测试要求和国家标准,提出的下肢站立康复训练装置的主要技术指标如表1所示。
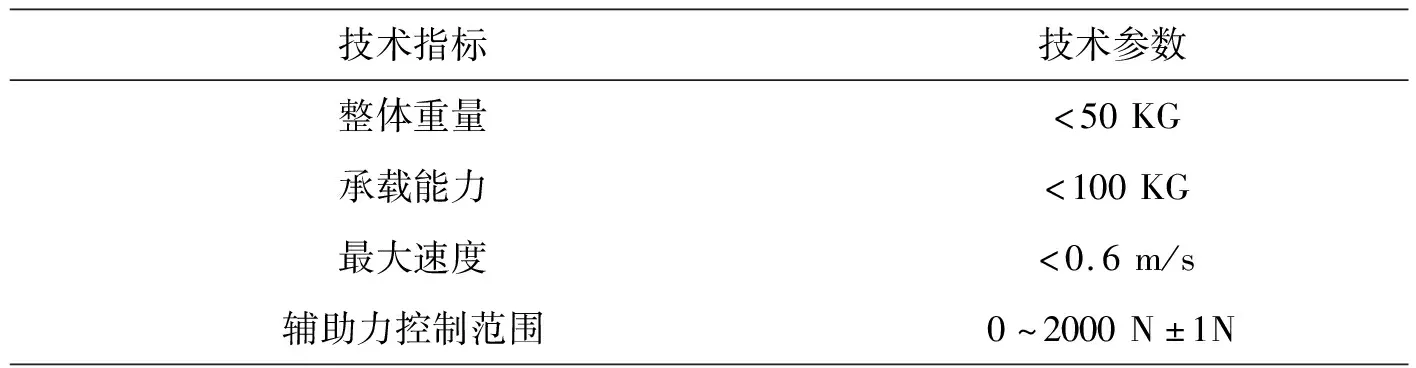
表1 下肢站立康复训练装置的技术指标表

续 表
基于三维设计对下肢站立康复训练装置进行结构设计如图1所示,由足底压力测量系统、驱动电机、蜗轮蜗杆传动系统、辅助支撑系统、控制系统和工控机等组成。下肢站立康复训练装置的具体工作原理如下:初始状态时,下肢运动功能障碍患者平稳地坐在装置平台内的坐垫上,由旋转电机通过蜗轮蜗杆减速器带动横梁旋转,同时,直线运动电机通过丝杠导轨系统带动臀部支撑系统实现直线运动,在两台电机的协调控制下使直线运动和旋转运动叠加完成站立过程中对髋关节运动轨迹的模拟,使患者随着横梁在径向平面内缓慢站立,达到了辅助下肢运动功能障碍患者进行站立康复训练的目的。
2 下肢站立康复训练装置的运动轨迹分析
由于不同年龄段、身高、体重的患者下肢关节长度、站立过程中的运动速度、活动范围和运动姿态不同,在对下肢站立康复训练装置设计时,需要对其运动轨迹进行分析。为了分析下肢站立康复训练装置的运动轨迹,将装置进行结构简化,以康复训练装置支座与固定板的连接处作为原点O,水平方向为X,垂直方向为Y,建立坐标系XOY(如图2所示),其中,l1为小腿长度,l2为大腿长度,B点为膝关节位置,A点为髋关节位置,设髋关节坐标为A(xa,ya),由于实际站立时根据坐姿不同B点位置与人体膝关节位置存在一定的水平距离,所以为了保证站立时髋关节的运动轨迹与人体正常站立时轨迹相同,需要通过直线电机控制A点沿l2方向实现往复运动。假设人体初始坐立状态时髋关节与小腿成90°理想状态,根据运动学分析可以求出髋关节坐标为:
(1)
由于下肢站立康复训练装置的运动速度关系到患者康复训练时的平稳程度,初期康复训练时,由于患者的心理和生理因素影响,要以较低的速度进行站立康复运动,康复训练中后期可以逐渐提高训练速度,提高患者的平衡控制能力和下肢肌肉力量,所以,训练装置的角速度和直线速度应该保证平顺,同时,患者的髋关节位置的合成速度也应平稳,避免速度突变产生的冲击。
由式(1)髋关节位置的运动轨迹可以求出髋关节的运动速度为:
(2)
则髋关节的加速度为:
(3)
为适应不同康复训练患者的身高、站立速度,需要求出旋转电机控制的角度θ,才可以利用控制系统进行运动轨迹控制,由式(1)可以求得:
(4)
则可根据式(4)求出角度θ的运动规律为:
(5)
下肢站立康复训练装置的旋转角度与人体下肢尺寸参数之间的函数关系充分描述了患者站立过程的运动范围,上述推导的运动方程可建立人体站立的动态模型。
3 基于RecurDyn的下肢站立康复训练装置运动控制仿真
为了直观地分析下肢站立康复训练装置在控制系统下的运动轨迹,需要将机械系统模型和控制系统模型联合进行仿真分析。为了验证下肢站立康复训练装置的控制系统能否满足站立康复训练的要求,针对下肢站立康复训练装置的闭环控制系统的设计要求,利用多体动力学分析软件RecurDyn的colink控制求解器进行机械系统的运动仿真,实现机械和控制系统的协同仿真。
RecurDyn的colink控制仿真主要流程如图3所示,首先,建立下肢站立康复训练装置机械系统模型,导入到RecurDyn多体动力学分析软件中,验证模型准确性。其次,对机械系统模型施加运动约束和驱动约束,施加各构件之间的接触副和底座与地面之间的固定副等。然后,创建下肢站立康复训练装置机械系统模型的输入和输出接口。随后在colink工具箱中建立力位混合控制系统框图,建立康复训练装置的控制方案,如图4所示。最后,设置仿真时长和迭代运算补偿进行控制系统与机械系统联合仿真分析计算,对仿真结果进行分析。
在RecurDyn中,选择File菜单下的Import,选择.rad文件,导入计算结果,进行运动仿真结果回放,下肢站立康复训练装置混合控制系统与机械装置联合仿真运动过程图如图5所示。由图5可知,随着人体站立运动的完成,下肢站立康复训练装置在90°到180°范围内运动,此结果能够满足下肢运动障碍患者的站立康复要求。仿真完成后对臀部支撑部件的运动轨迹进行分析,与健康人体站立过程中髋关节运动轨迹对比如图6所示,实际站立运动轨迹与仿真运动轨迹吻合度较高,最大偏差小于2%,说明该控制系统可满足下肢运动功能障碍患者站立康复训练的运动轨迹要求。
4 结论
针对下肢运动功能障碍患者的站立康复训练需求,对下肢站立康复训练装置提出具体设计要求,完成了康复训练装置的结构设计。通过对下肢站立康复训练装置运动轨迹的分析,得到了康复训练装置的旋转角度与人体下肢尺寸参数的函数关系。基于多体动力学仿真软件RecurDyn实现了下肢站立康复训练装置机械系统与控制系统的联合仿真,通过仿真分析得到了臀部支撑部件运动轨迹曲线,与实际站立运动轨迹对比发现最大偏差小于2%,预测了站立康复运动下的运动轨迹趋势,验证了该装置能够追踪站立运动轨迹,能够辅助下肢运动功能障碍患者按照规划的运动轨迹完成站立康复训练。
