一种旋转喷头并联机构的研究
2020-05-06丁亚飞毛桂庭刘智谋
丁亚飞 毛桂庭 刘智谋 柯 熠
(长沙矿冶研究院,湖南 长沙 410006)
0 引言
由于船舶的作业场所具有高盐、湿润的特点,极易产生锈蚀等危害,会给船舶的正常运行带来较大影响,所以,需要对表面锈蚀进行必要的处理。同时,由于在对新造船进行涂装等作业前,也须进行表面清理以提高油漆附着性。因此,对船舶表面进行清理是极为必要的一项步骤。
高压磨料水射流技术是一项新兴的金属表面处理技术,在20 世纪80年代才在国内兴起[2],其主要应用于清洗行业,该文所用的高压清理喷头及设备皆为长沙矿冶研究院研发的具有自主知识产权的产品,其具有环保、绿色、无污染以及高效等特性,可减少对环境的污染,提高生产效率,并降低对操作工人的身体危害。在船舶清理方面,国内有合肥通用机械研究所、上海大学等一批科研机构和院所投入其中,并研发出了手推式和纯水射流爬壁机器人清理装置。美国国家宇航局喷气推进室实验室成功研制了M2000 及M3500 等系列船舶清理机器人。德国也成功研制了HAMMELMANN 船舶爬壁清理机器人[1]。但上述清理机器人都是采用高压纯水清理,由机器人平动运动带动喷头来对船舶壁面进行清理,清理效率较为低下。
针对旋转清理的研究,也慢慢在相应的领域内兴起,而其一般所用的旋转喷头为被动式旋转喷头结构,其为旋转密封结构,旋转密封如图1 所示[11],其工作原理为高压射流由进水管进入喷头中,喷头结构中的密封轴内套和密封轴外套进行相对转动,实现了喷头的旋转运动,使射流可旋转喷射在待清洗工件表面,达到预期的目的。该文所采用的清理方式为磨料射流清理方式,即在高压射流中夹杂有磨料颗粒,可在很大程度上提升清理效果,但是由于磨料颗粒的存在,磨料颗粒会进入这种被动式的旋转密封结构中,导致其坏死并极大地减少喷头的使用寿命,增加生产成本。

图1 旋转密封结构
基于此,该文创造性地提出将一种并联机构应用于船舶清理机器人结构中,如图2 所示,由该机构带动喷头进行螺旋形运动,可以提升射流清洗效率,降低生产成本。该文针对旋转喷头的工作情况进行综合考虑,对传统的六自由度机构进行简化,使其具有三自由度,增加运行平稳性,并对其进行了运动学及有限元分析,具有一定的创新性。

图2 并联旋转机构
1 并联机构运动学分析
并联机构图如图3 所示。静平台固定于地面之上,通过伸缩杆与动平台相连,伸缩连接杆与动平台及静平台之间都通过虎克铰进行连接,上下伸缩杆之间采用移动副进行连接。在静平台上建立O-XYZ坐标系,动平台上建立O1-X1Y1Z1坐标系,动平台坐标系投影如图4 所示[10],3 根连杆呈等边三角形连接在平台上,令三角形外接圆半径为r,可得三连杆与静平台连接点坐标为:

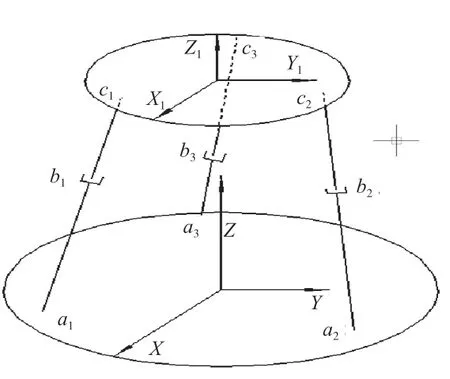
图3 并联机构坐标系
该文对运动平台旋转过程采用欧拉角进行描述,如图5 所示。其角度为绕X、Y、Z轴旋转的横滚、俯仰、翻转角,线绕X轴转动θ角,然后绕Y轴转动φ角,最后绕Z轴转动ψ角[3,5]。

图4 动平台上坐标系

坐标旋转矩阵为R=RZ×RY×RX,如公式(1)和公式(2)所示。
式中:RX为绕X轴旋转矩阵,Ry为绕Y轴旋转矩阵,Rz为绕Z轴旋转矩阵。
动平台上C点于定平台上坐标为:P=RP'+Q。其中,P为动平台上点在定平台上的坐标,如公式(3)所示,R为旋转变换矩阵,(a1,a2,a3)为动平台上点在动平台中的坐标,Q(x,y,z)为动平台相对于定平台的坐标。
式中:C=cos,S=sin
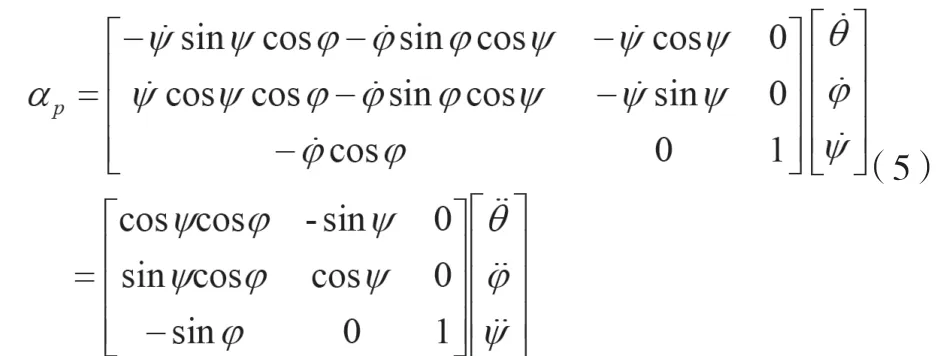
根据旋转矩阵定义,可得动平台旋转角速度(单位为:弧度/秒,n/s),如公式(4)所示:

对角速度表达式(4)进行求导,可得到动平台角加速度表达式(单位为m/s2),如公式(5)所示:
2 模型建立及仿真分析
2.1 机构模型建立
首先通过SolidWorks 建立旋转机构,伸缩杆通过虎克铰与动静平台进行连接,整个机构模型建立后如图6 所示。
对该并联机构运动平台,根据Kutzbach- Grubler 公式来进行自由度计算[9],如公式(6)所示:

式中:n为机构数,g为运动副数,fi为第i个运动副的相对自由度,m为运动副数,M为机构自由度。
可以得到该并联机构为三自由度机构,可以沿X、Y轴的平动以及沿Z轴的转动运动,满足该文中旋转喷头的运动要求。
2.2 虚拟样机模型建立及运动学仿真
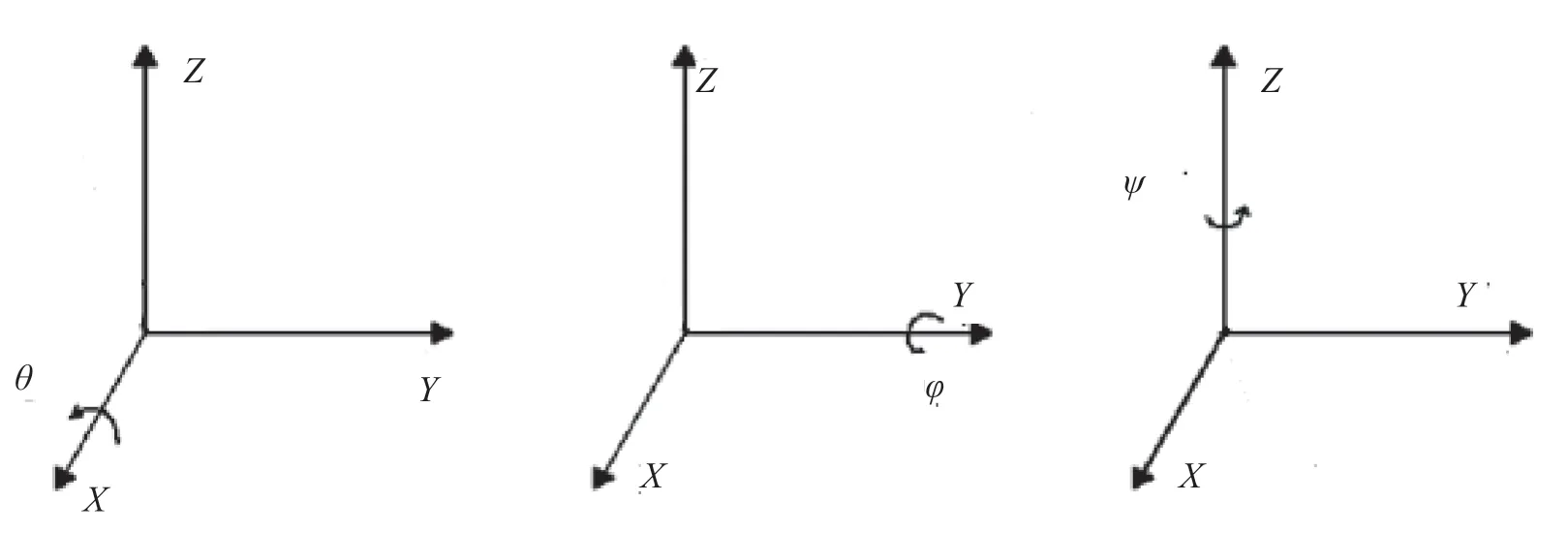
图5 绕坐标轴旋转顺序
将三维模型进行必要的简化,并将格式转换为Parasolid(*.x_t)格式[6],然后导入ADAMS 软件,进行仿真运行,建立仿真虚拟样机模型如图7 所示[10]。

图6 并联机构三维模型
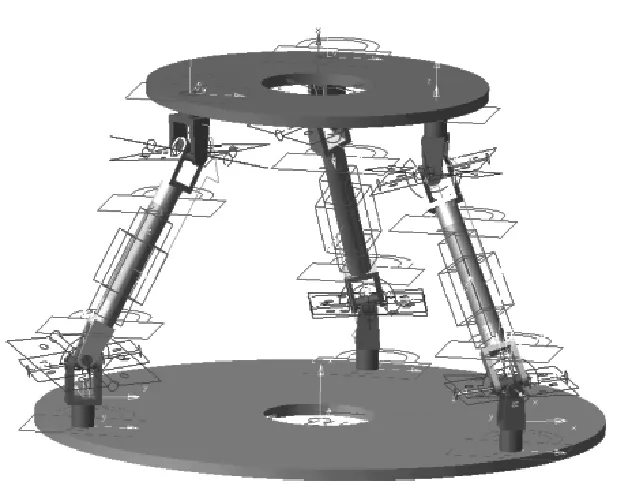
图7 仿真虚拟样机模型(仿真模型颜色较接近金属本色,较暗沉)
在仿真模型中添加运动副,使得模型可以正常运行,所加运动副见表1。同时,在伸缩杆件上添加移动驱动,分别为

虚拟样机在驱动为5sin(10t)时,进行仿真分析,机构X向运行曲线图如图8 所示。
虚拟样机在驱动为5sin(10t)时,Z向运行曲线图如图9 所示。
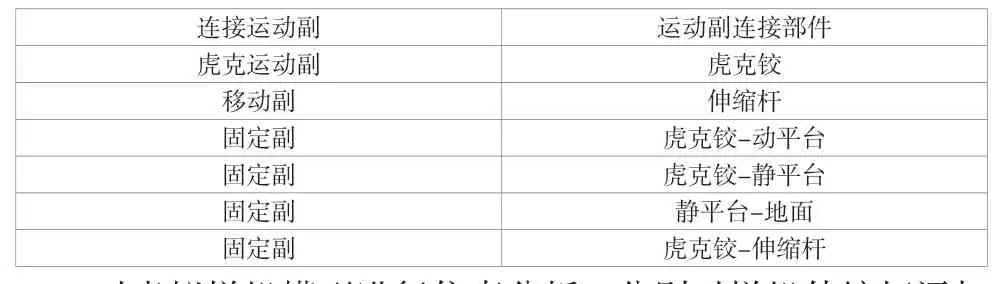
表1 运动副连接表
对虚拟样机模型进行仿真分析,分别对样机伸缩杆添加2sin(10t)、5sin(10t)、10sin(10t)、15sin(10t)的驱动运动,得到其Z向位移运动曲线,如图10 所示,分析运动曲线可以发现,随着添加驱动的幅值逐渐增大,Z向位移也随之增加,即振动逐渐增强,不利于清洗过程的顺利进行。
同时,对虚拟样机模型进行仿真,得到其X向位移曲线图,如图11 所示,(因动平台于X-Y平面内做圆周运动,其沿X轴和沿Y轴运动位移高度相似,因此,只对X向位移进行讨论),对该曲线图进行分析可知,随着对虚拟样机施加的驱动幅值逐渐增大,X向位移也逐渐增大,意味着清理面积得到了扩大,清洗效率得到提高。
基于以上仿真可以发现,随着驱动幅值数值的增大,X与Z向运动位移也在增大,驱动大于10 时,Z向位移明显提高,振动增强,当驱动幅值小于5 时,Z向位移增加比较平缓,但X向位移也减小,清理效率降低,增加生产成本。因此,驱动函数幅值选取范围为5~10,这样可以在振动较小的情况下获得较高的清理效率。
以5sin(10t)为例,对虚拟样机进行驱动,仿真得到动平台在X、Y向的速度加速度图,如图12 所示。

图8 幅值为5 的仿真X 向位移曲线图

图9 幅值为5 的仿真Z 向位移曲线图
该驱动下,机构运动速度平滑,能够较好的反映并联机构运动的规律,同时,平滑的速度曲线使得旋转结构清理不会发生较大的抖动,清理效果可以得到较好的保证。

图10 幅值2~15 的仿真Z 向位移曲线图

图11 幅值2~15 的仿真X 向位移曲线图
3 结构模态分析
机构在运行过程中,会受到电机转动产生的振动以及其他振动的影响,有可能会与该并联机构产生共振,出现较为严重的后果,因此,应对该并联机构进行模态分析[10]。

图12 仿真X、Y 向速度曲线图
振动物体物理模型可用如公式(7)所示:

式中:[M]—质量矩阵 [X]—位移矩阵
[C]—阻尼矩阵 [X']—速度矩阵
[K]—刚度矩阵 [X'']—加速度矩阵
F(t)—振动系统受力 sin(ωt)—振动系统受力相位
模态分析中,忽视阻尼系统的影响,无外界力及振动的施加,即F(t)=0,式(7)可简化为:

其中,令 {X}={x}sin(ωt)
可得到:
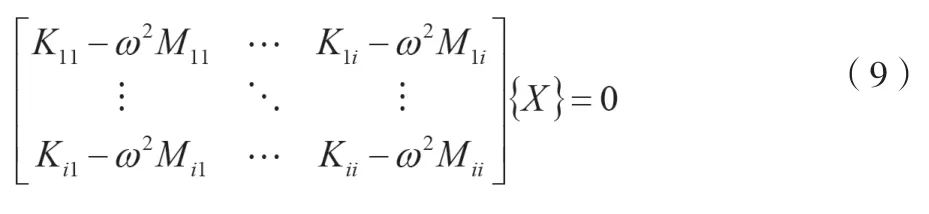
即行列式为0:

式中:K11为第一行,第一列刚度矩阵。依次类推,Kii为第i行,第i列刚度矩阵。M11为第一行,第一列质量矩阵。依次类推,Mii为第i行,第i列质量矩阵
其中,ω为机构固有频率,仅与系统的刚度、质量等系数有关。
对机构进行模态分析,首先将模型转换成Parasolid( *.x_t)格式,导入ANSYS 仿真软件进行分析。对导入的模型进行材料属性定义,该机构使用结构钢及铝合金2 种材料,其基本性能见表2。

表2 结构钢及铝合金性能表
定义好材料属性后对模型进行网格划分,采用ANSYS 默认的网格划分格式进行划分,机构有53 343 个节点,21 356个单元。网格图如图13 所示。

图13 有限元分析网格划分图
对划分好网格的机构施加边界条件,静平台处加固定约束,然后可进行模态分析。对机构进行模态分析,表3 为模态分析得到的频率表,发现其前3 阶模态频率值较小,第4阶之后的频率值较大。

表3 并联机构模态表
如图14 所示为机构前3 阶模态分析图,机构基本呈刚体型,未发生明显的形变,主要是连接杆位姿的改变。
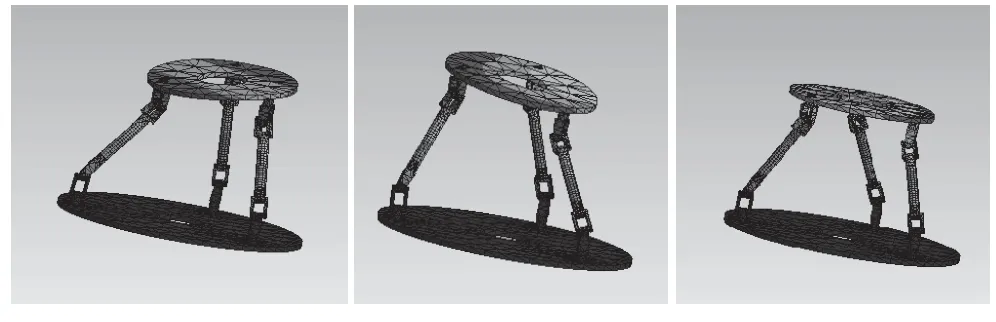
图14 前 3 阶模态
如图15 为后3 阶模态图,其变换主要是动平台的形变,在较高频率的振动中,动平台发生了弯扭变形。

图15 后 3 阶模态
在实际工况中,外界振动源主要是驱动电机,所以对电机进行频率计算:

式中:n为电机转速,f为电源频率(一般取工频50 Hz),p为电机磁场极对数。
该机构驱动电机选用三相异步电动机,根据电磁极数不同,取p=1~3,带入公式(11)可得到n=1 000 r/min ~3 000 r/min,对应的振动频率为P=1000/60=50 Hz,与机构最小固有频率87.065 Hz 也有较大差距,因此在启、停和正常运行过程中都不会发生共振。
4 结论
该文针对船舶清理系统的旋转机构进行了研究,首先建立机构数学模型,并对并联机构进行运动学逆解,得到其位移矩阵表达式,对该表达式进行求导,可以得到并联机构速度雅可比矩阵。然后,建立三维模型,并将模型导入ADAMS仿真软件进行仿真分析,对驱动函数的幅值进行优化分析,得到振幅在5~10 时,振动幅值较小,并仿真得到对应的速度曲线图,速度曲线较为平滑,有着明显的正弦规律,实际清理效果较好。对并联机构进行模态分析,得出在前3 阶模态中,机构为刚体形变,主要是支杆位姿的变换,后3 阶模态是静平台上的形变,发生了弯扭形变。在实际工况条件下应避免在该频率段使用器械。同时对实际工况的电机振动与机构固有频率进行了比较,发现实际使用电机不会与之发生共振。
