中低速磁悬浮列车悬浮间隙控制
2020-05-06樊永霞刘立国刘红军
樊永霞 刘立国 刘红军 乔 松
(1.北京中车长客二七轨道装备有限公司,北京 100068;2.中国中车股份有限公司,北京 100089)
0 引言
运行速度在80 km/h~140 km/h 的磁悬浮列车,统称为中低速磁悬浮列车,其主要适用于城市内部及观光旅游专线的轨道交通工具。随着轨道交通车辆的发展,中低速磁浮列车作为一种中等运量,新型的轨道交通制式,具有运行安全、噪声低、环保、线路适应性高、建设和维护成本低、舒适度高等优势,已经逐渐得到了市场和用户的认可,目前国内已建成并使用的线路有2 条,分别是北京S1 线和长沙线,在建的有广东清远旅游专线和湖南凤凰磁浮旅游专线。
根据悬浮方式磁悬浮列车分为常导磁吸式(EMS)、常导磁斥式(EDS)和超导钉扎式,中低速磁悬浮列车采用常导磁吸式(EMS)悬浮方式,该种形式利用磁极异极相吸特性达到悬浮。为保证列车在各种内部、外部干扰下能稳定悬浮,快速跟踪轨道,就需要依赖安全可靠、快速响应、能够实时检测并有效控制的悬浮控制系统,所以悬浮控制是磁悬浮列车的核心和关键技术。
该文根据悬浮间隙控制原理,对中低速磁浮列车悬浮间隙控制进行建模,在忽略漏磁场影响、不考虑铁芯饱和的情况下根据悬浮力—电流—悬浮间隙之间的关系,来验证所建模型的合理性、可靠性和可行性。
1 悬浮间隙控制原理
悬浮间隙由间隙传感器测量,目前普遍使用电涡流式测距来测量悬浮电磁铁和导轨间的距离,这是一种非接触式测距传感器,该传感器具有结构简单、分辨率和灵敏度高、输出信号强、线性度和重复性高等优点。其测量原理是将间隙传感器安装在悬浮电磁铁上,要求悬浮传感器探头面与轨道长定子面保持平行。悬浮传感器能够检测极板与轨道间的间隙,以及电磁铁的垂向加速度,并具有判断间隙输出是否存在故障的自诊断功能。
电涡流传感器的金属导体可以看做是一个短路线圈[1],其与高频通电扁平线圈磁性相连,根据变压器原理,把高频导电线圈当做变压器的原边[2],金属导体中的电涡流回路看成副边,可简化电涡流式传感器的等效电路如图1 所示。根据基尔霍夫定律可以得到等效电路的方程如下:

式中:U1—原边激励线圈电压,i1—原边激励线圈电流,i2—副边被测导体的电流,L1、R1—原边激励线圈的电感和电阻,L2、R2—副边被测导体的电感和电阻,R、X—负载的电阻和电抗,M—激励线圈和被测导体之间的互感,ω—激励正弦电压角频率,j—向量单位。

将(2)带入(1)得到:

式中:X1—原边激励线圈感抗,X2—副边被测导体感抗,XM—激励线圈和被测导体之间的互感感抗,R22—副边电阻值,X22—副边电抗值,M22—副边的互感系数。
由式(3)可知,互感M的变化会引起副边折合到原边的阻抗变化,从原边端看去,可看做是原边线圈阻抗的变化。如果用恒频、恒幅的信号来激励线圈,可以通过检测线圈输出电压的变化来测量线圈和被测导体之间的位置变化。
通过以上分析可以看出,电涡流式传感器利用电磁感应把位移量转换成线圈的自感系数L或互感系数M的变化,再由测量电路转换为电压或电流的变化量输出,实现位移量和电量的转换。控制系统以电量的变化为输入信息,经过计算输出控制量控制电磁铁端的电压,达到控制悬浮力的目的,从而控制列车悬浮在额定间隙及允许范围内。

图1 电涡流传感器等效电路
2 磁悬浮列车悬浮间隙控制模型建立
悬浮控制系统的主要功能是使悬浮间隙能够始终保持在7.5 mm~8.5 mm 的额定范围值之内,实现车辆稳定悬浮,并在运行过程中快速、实时地跟踪轨道。该系统主要由电源模块、悬浮控制器、悬浮传感器、斩波器和悬浮电磁铁组成,其控制模型如图2 所示。

图2 悬浮控制模型
在该模型中电源模块为控制计算机及其他内部模块提供持续稳定的工作电压,悬浮传感器测量悬浮间隙、电磁铁垂向加速度及电流信息,悬浮传感器输出4 路间隙信号,两路加速度信号,各路通道都通过各自的一个串行通信接口传送给悬浮控制单元,作为悬浮控制器的控制输入,悬浮控制器采集到相应的数据后,利用内置的分布式控制计算机,对采集到的数据进行实时计算,发送相应的控制量到斩波器,斩波器将控制器计算得到的弱电控制量转化为强电电流,实时修正每个悬浮控制器控制的电磁铁端电压,驱动电磁铁运动,进而控制电磁铁磁极与轨道间的距离,保证车辆在允许间隙内稳定悬浮。
悬浮控制系统为保证列车悬浮间隙的精准性,需要实时与车辆进行信息交互,因此,悬浮控制器采用CAN 总线、标准帧实现悬浮控制器与车载计算机之间的数据交互。悬浮控制器向车载计算机发送控制器的关键状态、故障信息。车载计算机向控制器发送车辆关键运行信息、线路信息,同时实现复位、切除和标定等简单控制。
3 悬浮控制算法
将磁悬浮列车看成是一个受电磁铁和导轨间作用力控制的六自由度空间自由体[3],悬浮、导向、驱动3 个控制模块缺一不可。当电磁铁中通以电流后电磁铁和导轨之间产生吸力[4],忽略漏磁场影响,在不考虑铁芯饱和的情况下得到悬浮力—电流—悬浮间隙之间的关系如下

式中:F—悬浮力,i—电磁铁电流,z—悬浮间隙,i—电磁铁电流,Z—悬浮间隙,k—悬浮力计算系数,m—车辆重量,g—重力系数。
式(4)中

式中:μ0—真空磁导率,N—电磁铁线圈的匝数,A—电磁铁线圈的有效极面积。
设列车在没有乘客,载客量为AW0 时,质量为m0,其标称工作点为

式中:F0—标称工作点悬浮力,i0—标称工作点电流,z0—标称工作点悬浮间隙,m0—列车自身重量。
对式(6)进行局部线性化。当悬浮间隙在标称工作点z0=0.008m 处,随着载客量的变化,列车的质量m0+Δm在变化时,即m=m0+Δm时,此时电磁吸力

式中:Δm—乘客重量。
由式(7)得出,如果此时电磁铁的电流过大,则悬浮间隙会过大,如果电流过小,则列车悬浮间隙过小,甚至会掉到轨道上,为达到列车保持8 mm 悬浮间隙的目标,当车辆载客量在AW0~AW3 变化时,按目前我国已运行的中低速磁浮车辆安装5 个悬浮架,每个悬浮架上安装2 个电磁铁,每台车安装10 个悬浮电磁铁,这10 个电磁铁5 串2 并的形式连接,根据式(7),悬浮力与电流之间的关系见表1。
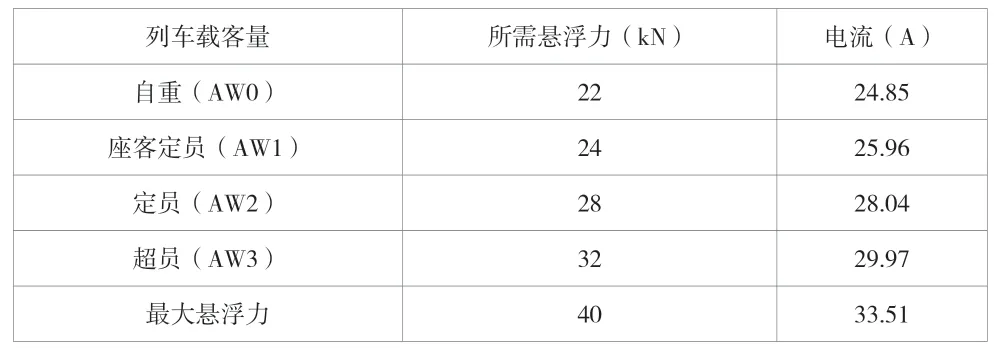
表1 悬浮力与电流之间的关系
依据表1 额定悬浮间隙下,悬浮力和电流之间的变化关系,悬浮控制器内的信号处理板解码传感器发送的间隙和加速度信号,并完成数字滤波,将滤波后的数据传输给悬浮控制板。悬浮控制板根据得到的间隙、加速度、电流、电压等数据,综合应用多种信号解算出当前的控制量,当悬浮电磁铁的线圈匝数和截面积一定时,线圈电阻就一定,根据电流的变化,得到悬浮电磁铁端电压的变化和电流的变化成正比,通过实时控制电磁铁的端电压就能使列车稳定悬浮在距轨道8 mm 的位置,以达到列车稳定悬浮,安全可靠跟踪轨道的目的。
4 结论
该文分析了电涡流式间隙传感器的测量原理,根据测量原理建立中低速磁悬浮列车轨道间隙控制模型,之后简化了磁悬浮列车和轨道之间的悬浮模型,通过控制算法,计算了悬浮力—悬浮电磁铁电流—轨道间隙之间的关系,验证了所建模型控制方案的合理性。目前我国已运营的长沙线和北京地铁S1线都是基于该控制方案进行悬浮间隙的控制,并且2 条在运行的车辆悬浮稳定,运行良好,表明该模型具有很高的可靠性和可行性,适合在磁悬浮列车间隙控制工程中应用。
