基于北斗卫星的BGAN应急指挥监控系统设计
2020-04-29杨瀚驰高旭东
杨瀚驰,高旭东
(1.西南交通大学 经济管理学院,成都 610000; 2.太原理工大学 计算机科学与技术学院,太原 030024)
0 引言
卫星技术出现于20世纪60年代,该技术一经出现就得到了人们的广泛欢迎,相应的通信技术、业务内容和产业规模也不断发展[1]。北斗卫星系统是我国自行研制的系统,根据三球交会测量原理设计,不仅能够完成全球卫星定位工作,同时可以实现通讯控制工作。北斗卫星系统是一套十分成熟的卫星系统,它将用户的所有信息汇总到地面中心站中,利用地面中心站实现用户与用户之间的双向通讯,它的出现使我国数字化建设工作进展得更加顺利[2]。由于北斗卫星系统在数据传输方面不存在任何困难,所以十分适合监控车辆,通信能力也要高于GPS,使用北斗卫星系统进行车辆监控,可以直接从中心站调取用户信息,然后把从中心站得到的命令转达给用户。北斗卫星系统已经全面覆盖我国大陆地区和海区,就连部分周边地区也覆盖了北斗卫星系统,覆盖能力高于电信蜂窝网络,是真正意义的无盲区覆盖,可以针对各类车辆进行大范围监控和调度[3]。
BGAN指的是Inmarsat宽带全球区域网,英文全称为broadband global area network,该区域网络针对Inmarsat宽带设置,起着通信作用,具有接入宽带网络、实时视频通讯等能力,用户在全球的任何一个地点和任何时间,都可以连接该网络,业务内容包括语音通讯、视频通讯、传真、短信连接等等。BGAN最大的优势就是全球覆盖,用户无论在何时何地都可以得到最可靠的服务,除此之外,BGAN的宽带业务能力也很强,满足当代人在数据通讯方面的需求[4]。
目前研究的应急指挥系统在通信链路可靠性、通讯数据传达准确性和资源整合速度等方面都有着很大的缺陷[5]。针对上述缺陷,基于北斗七星设计了一种新的BGAN应急指挥监控系统,构建监控中心,根据监控中心开发移动终端,通过实验验证该监控系统的有效性,本文的研究可以很好地解决目前车辆监控系统存在的一些问题。
1 基于北斗卫星的BGAN应急指挥监控系统硬件设计
1.1 系统总体框架及原理
系统的总体架构包括采集模块、处理模块、通讯模块、指挥监控模块4部分组成。系统的总体框架如图1所示。

图1 系统总体框架
采集模块主要负责采集车辆信息,处理模块能够调度监控的车辆所在的地图,并对得到的地图进行拖拉、缩放等工作,通讯模块通过线程读取北斗卫星系统中的各项数据,监控模块连接局域网计算机和外网计算机,所有的监控结果都展示在彩色监视器上。系统软件结构在C/S体系结构的基础上加入了4个层次,分别是:支撑层、基础层、服务层和业务层,从而实现系统的通信报告功能和指挥服务功能。
1.2 采集模块
采集模块主要负责采集车辆信息,在采集模块使用的采集芯片型号为AHD80H-9721。在采集芯片外部加入了DSP、CPLD、A/D采样保持器,并外设Flash,利用调理电路和电源控制模块的正常运行。采集器可以直接采集移动终端中的数据,将采集到的数据通过PDA、移动终端等手持设备连接客户端,每个移动终端都会连接一台BGAN设备,由连接的BGAN设备接收卫星网络信息,使手持终端设备可以顺利地和服务器端进行通讯。在服务器端内部设置监控中心,以设置的监控中心作为指挥调度的主题,当卫星传输终端接收到移动终端传来的信息后,会自动上传到监控中心,监控中心对接收的数据进行处理,并将处理结果存储在中央数据库中,显示在运行图上,根据数据的运行状态实时下发对应的控制命令,确保可以很好地监控每个运行的终端[6]。
信号会从设备的PT/TC流入到模块内部,主要包括电流信号和电压信号,利用光耦隔离变换和二阶滤波处理得到新的数字信号,由A/D转换电路将滤波的结果传给DSP,通过傅里叶变换计算出采集的信号的有效值,将得到的值存储在外设FLAH存储器中。
1.3 处理模块设计
在处理模块中加入了由Intel公司生产的型号为GDS110BB芯片,该芯片属于通信IC处理芯片,电源电压在4.5~5.5 V之间,功率为32 W。该处理器内部高达1.7 GHz的双核Krait使系统具有高速性能,ADRENO GPU适用于高级图形,MEXAGON DSP适用于各种应用程序,且消耗功率很低,处理器内部的摄像高达13.5 MP。处理模块能够调度监控的车辆所在的地图,并对得到的地图进行拖拉、缩放等工作。当系统打开相应的地图资料后,对地图资料的图层进行添加,修改对应的属性以及数据,保存修改的地图,根据修改地图分析监控的车辆运行状态和所在环境。
处理模块中拥有多个数据集,通过查询模块查询数据集、矢量数据集、选择集、记录集、地图窗口确定处理方式,被查询的内容对应关系和结构如图2所示。
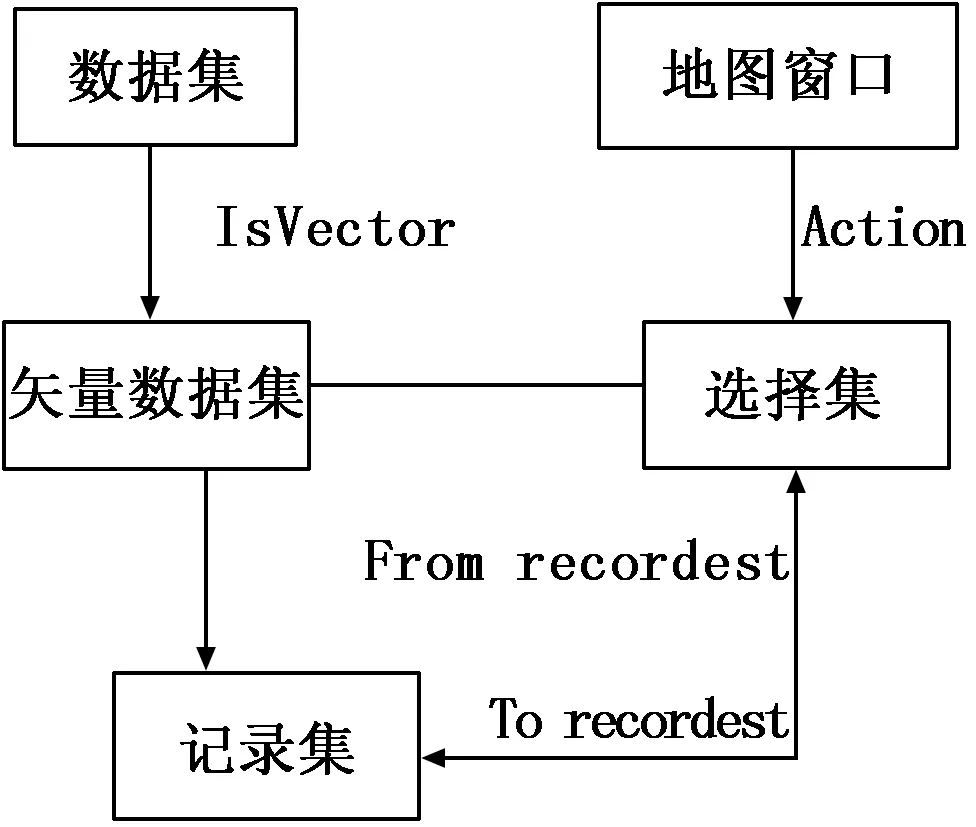
图2 查询类及其结构
分析图2可知,向量数据集、记录集和选择集之间有着密切的关系,所有的数据集都要以集成记录的方式进行汇总,被查询的信息在高亮状态下被选中,清晰地展示在用户面前[7]。通过处理模块进行路径分析,根据分析的网络数据确定出最短路径。在进行最短路径分析时,要确定起始点和终止点的数据,分析不同等级道路的最高限速,由于限速不同,所以最短路径无法代表花费时间最少的路径,因此在确定最短距离路径时也要标注出行驶时间[8]。最短距离路径和最短时间路径都以高亮的方式显示,由用户自己选择需要的路径[9]。
1.4 通讯模块设计
通讯模块是应急指挥监控系统的重要模块,通讯模块中选用美国TASE公司研究的EXS2511芯片,该芯片同时设置了LPT接口、USB接口、音频接口,同时设计了PCI扩展槽、AGP扩展槽和多个芯片组。通讯模块中内部加入定位报告子系统,由定位报告子系统将本地的报告策略文件导入,不同类型的报告策略文件指挥不同的用户车,在指挥过程中配置对应的策略界面。系统的串口会展示通讯线程,利用通讯线程读取北斗卫星系统中的各项数据,并且对得到的数据进行局域网授时。当用户配置报告策略确定下来后,定位报告子系统会上传或者下发信息,在分发系统的接口中发送和接收所有的数据。
通讯模块发送的字节数越少,发送过程越简单,效率越高,为了减少发送的字节数,应急指挥监控系统的软件程序可以对指挥中心的各项信息进行压缩,在众多压缩算法中,半字节压缩算法运行过程简单,处理结果强,因此成为本文的首选压缩算法。利用半字节压缩算法去除整个字节中的冗余位,将重复的部分和相似的部分压缩出去,从而使字节数得以减少。
1.5 指挥监控模块设计
监控模块同时包括了吸顶式彩色摄像机、红外一体化彩色摄像机,外置解码器、串口转换器,指挥监控模块连接局域网计算机和外网计算机,所有的监控结果都展示在彩色监视器上。
监控模块通过无线自组织网络运行,这样即使带宽条件有限,也可以精准地实现定位。由于指挥车中的下发数据含量很大,监控起来比较困难,所以所有的指挥车下发数据都要进行增量编码,通过对比存储值,得到下发数据的差值,除了差值需要进行下发之外,符号也需要进行下发,在进行数据导航时,要尽可能多地分析各类数据的变化信息,如果数据量固定不变,这可以减少发送。
系统的整个运行期间,监控模块都会采用定时的方式监护各个设备的运行状态,并将监控结果反馈给监控分系统。当被监控的信息出现异常时,由双机热备管理下发切换命令,出现异常的进程会被列为重点监护对象。一旦进程监控服务启动失败,系统就会自动出现告警信息,出现的告警信息会传送给监控分系统。进程监护服务能够同时接受管控系统和分系统传来的命令,当接收到终止了命令时,所有的进程都会在短时间内相继被终止,终止结果也会反馈给下发命令的系统。
2 基于北斗卫星的BGAN应急指挥监控系统应用功能设计
利用C/S体系结构开发系统软件,使系统能够更好地继承前期系统的技术优势,从而提高系统的集成能力和兼容性,满足客户的需求。设计的软件结构在C/S体系结构的基础上加入了4个层次,分别是:支撑层、基础层、服务层和业务层,基于北斗卫星的BGAN应急指挥监控系统软件各层次逻辑结构如图3所示。

图3 应急指挥监控系统软件各层次逻辑结构
2.1 通信报告功能
通信报告功能实现流程如图4所示。
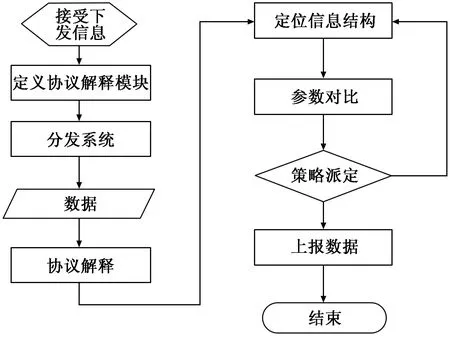
图4 通信报告功能实现流程
指挥系统的串口可以确定车辆所在位置信息,这些信息在被确定之后,全部保留下来。当指挥车接收到新的上报信息后,对应的车辆信息也会被更新,所有的用户配置接口都可以上报信息,用户在读取完指挥车的信息后,可以自行选择上报内容,即确定是部分上报还是全部上报。用户拥有手动请求的原理,当用户输入请求后,系统会进行上报或者下发工作。通信报告确定的策略文件必须要由用户确定后才可以生效,用户有权利进行手动修改,被修改的结果会自动储存。被上报的策略会跟系统储存在数据库中的策略进行对比,分析时间数据、高度数据和速度数据,在比较参数结果后,分析被指挥的车辆是否与报告中的标准相吻合,利用用户调整确定不同参数的门限值,使用两点之间的经纬度数据确定移动距离。
2.2 指挥服务功能
在基础软件层上运行服务层,使上层软件能够很好地得到支撑服务,在处理信息这一问题中,服务层是一个十分重要的环节,服务层可以提取和抽象应用软件的共性部分,使上层应用软件在设计中得到简化,软件之间的耦合性得以降低,进而提高软件的扩展能力,增强软件处理结果的可靠性。服务层同时具备进程监护、业务调度、消息服务三项功能,进程监护主要是监护每个服务器的运行状态,判断业务的工作进程,由此来确保服务器运行过程是安全可靠的。
当服务器开机时,应急软件监控系统就会自动启动进程监护,这一项目也变成了首要启动项,进程监护服务程序中拥有进程表,其它进程的启动需要根据进程表的顺序运行,通常会首先进行业务调度,然后进行双机热备管理,接着进行消息推送,再接着进行时间校验,最后完成信息发送。进程监护的启动和终止序列如图5所示。

图5 进程监护的启动和终止序列
3 实验研究
3.1 实验目的
为了进一步验证本文基于北斗卫星的BGAN应急指挥监控系统的实际效果,同时与传统应急指挥监控系统进行对比,设置了验证实验。
3.2 实验参数与实验环境设计
设置实验参数如表1。

表1 实验参数
设定的实验环境如图6所示。

图6 实验环境
3.3 实验结果与分析
根据上述实验参数和实验环境进行实验,同时选用传统的BGAN应急指挥系统以及本文研究的基于北斗卫星的BGAN应急指挥系统进行应急指挥,进行实验测试,得到的实验结果如下:
3.3.1 平均响应时间测试
由图7可知,本文系统较传统系统的平均响应时间缩短了35 ms,响应时间由三部分组成,分别为传输时间、处理时间和绘制时间,传输时间指的是PC机向下位机发送连接请求,再反馈给上位机反馈给PC机所用的时间;处理时间是指下位机伺服系统接收到处理请求到处理完成这一过程花费的时间;绘制时间是指PC机将得到的处理数据反馈到PC机端花费的时间,整理实验结果数据,得到表2。

图7 平均响应时间测试实验结果
表2 平均响应时间实验结果数据对照表

系统运行内容传统系统平均响应时间/ms本文系统平均响应时间/ms登录2521参数设置624601发送信息332308读取数据6560信息设置412390显示设备运行状态信息409371显示数据库信息2517
根据上述实验结果对照表可知,基于北斗卫星的BGAN应急监控系统花费的平均响应时间始终低于传统系统的平均响应时间,这主要是由于基于北斗卫星设置的监控系统CPU使用率高,卫星MODEM模块中多个线程都会启动运行。由此可知,基于北斗卫星的BGAN应急监控系统响应速度快,响应时间短,更适合进行应急指挥工作。
3.3.2 噪声干扰下指挥信号波形
由图8可知,在噪声干扰下,基于北斗卫星设置的指挥信号波形图波动更小,稳定性更高。传统的应急指挥监控系统在受到噪声干扰时,动态响应能力和数据分发能力大大减少,各个移动终端难以迅速分析到车辆的运行情况。本文研究的应急指挥监控系统通过与北斗卫星进行配合,能够有效地过滤掉无用数据,即使受到外界的噪声干扰,也能够高速有效地进行指挥监控工作。

图8 噪声干扰下指挥信号波形图
3.4 实验结论
根据上述实验结果,得到如下实验结论:本文甚至的应急指挥胸膛能够很好地确保硬件结构能够顺利地处理信息。通过设置外购软件操作整个系统的运行环境,为各项程序的运行提供良好的环境,即使在受到外界信息感干扰,系统也能够高速稳定地运行。系统可以顺利完成进程监护、业务调度、消息服务和校验等支撑服务,并且可以在短时间内完成响应工作。
4 总结与展望
针对目前车辆信息管理存在的需求,利用北斗卫星设置了BGAN应急监控系统,软件选择C/S作为架构,通过ASP.NET服务器网页开发工具完成设计。设计的系统能够利用北斗卫星精准地完成定位工作,并将得到的结果反馈给监控指挥中心,针对监控指挥中心提出的命令进行信息处理、数据管理等工作。该系统不仅具备定位跟踪、运输指挥功能,同时可以进行数据通讯、信息传输和安全监控,集成度高,实时性强,保密性好,且北斗卫星系统遍布全国,所以设计的应急指挥监控系统适用范围极广。
由于研究时间和研究技术有限,未来还需要进一步加强指挥系统安全保密工作的分析,使系统整体运行都能处于一个安全的环境,同时也要尽可能多地丰富系统的业务功能,提高系统运行的灵活度。
