自动控制技术在汽车碰撞系统的研究
2020-04-27王英辉
王英辉
(三亚学院,海南 三亚572000)
1 背景
汽车数量日趋增多,国民道路安全意识越来越高,许多车辆不具备防撞系统装置,汽车防撞报警系统是防止汽车在道路上行驶时发生碰撞的一种预防的安全措施,能有效减少道路交通事故的发生。防止车辆在行驶中遇到危险的障碍物,或者在车主不注意的情况下,当车辆快碰到障碍物时,自动地提醒驾驶员使汽车进行制动,能有效地防止汽车发生碰撞,减少不必要的财产损失,将交通事故降到最低[1]。
2 系统整体设计
防撞装置主要是围绕了“安全”的目标来考虑,防撞装置的信息获取处理和执行,主要分了三个模块;(1)测距信息获取模块:这个功能最主要的工作意义是获取车辆与周边车辆的距离或与边临的障碍物距离信息;(2)获取的信息控制模块:由主控器完成信息的比较,并传达指令给下边的执行元件;(3)指令执行模块:工作内容主要是执行信息处理模块发出的数据指令,从而能自动及时的通过声光报警来提示驾驶员安全行驶,或使其车辆自动刹车等[2]。起到了很好的安全作用,可以防止发生不必要的车辆碰撞,所以出于安全方面的考虑来设计的汽车防撞报警系统,将可以大大的减少了由于倒车碰撞、追尾碰撞、正面碰撞等不必要的碰撞损失。
2.1 硬件整体电路
在整个防撞报警系统的电路设计模块,包括了单片机主控电路,探测距离获取电路,系统信息处理,系统报警、显示距离等电路。每个部件模块在系统中都担当着不同的功能,在系统中信息的采集与处理执行,全由系统的测距传感器、单片机、声光报警及距离显示警报等来完成,都担任着不同的角色。传感器主要任务是获取车辆与周围物体的信息,而获取的内容传给单片机进行处理。防撞系统的整个硬件电路中,51 单片机作为处理系统模块,主要是处理数据。且该单片机具有40 个引脚端口,采用低电压工作,在运行中可以实现修改和编程,显示器的工作是接收由单片机的指令,并执行实时显示数据。蜂鸣器和发光二极管也是接收主控器的指令,由系统控制声音和光报警信息是否发送。整体电路原理图如图1 所示。
系统的主要电路部分包括超声波的发射端和接收端电路,以及选取的蜂鸣报警器,显示屏和单片机等电路组成。超声波电路模块可以实现对测量距离的获取,起到了探测距离的作用,并将其信息输送给单片机进行处理。而决定测距危险报警的主要是由单片机来处理数据,并根据接收到的数据信息与设定的危险报警距离进行对比分析,最后决定是否发出报警指令,从而控制防撞系统是否报警。
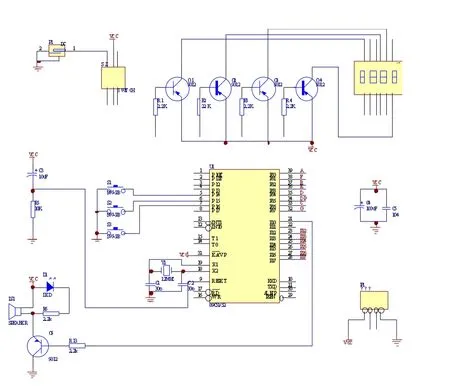
图1 防撞系统整体原理图
2.2 软件整体设计分析
软件方面,首先进行初始化LED 显示器,使其显示开机界面为初始值“0.00”的状态,表示系统还未进入工作状态。当获取40kHz 的脉冲数据时,该装置开始启动接收程序。并让子程序和中断服务程序配合运作,这样一来就可以完成了主控器的工作。主要是协助防撞系统检测处理超声波传感器的信息,且C51 单片机通过获取的信息,来判断是不是有回波,并是否采取外部中断子程序。而系统的发射端与接收端的脉冲信号传递至处理器调用及计算程序,并且显示测量的结果,同时当测量的距离信息小于设定的安全距离时,由系统做出相对的控制指令。
主控制器来实现整个软件的功能,且运用子程序来协助工作。把获取得到的数通过程序内部运算,并且把算出来的结果信息上传至显示模块。根据获取的数据和系统发出的指令来完成,再根据指令决定是不是要采取中断措施,中断程序中需要用到TH0*256+TLO,此公式的得到的数据要经过系统的转换后才可以输出。
3 报警显示模块
3.1 报警显示模块硬件电路设计
显示模块在防撞预警装置里是有不可缺少地部分。这一模块采用的显示器是共阳极的,并运用74LS06 驱动器来驱动显示,可以直接的让行车人员直观地看到,该汽车跟周围物体的间隔距离,且用LED 显示器来显示具体距离。而该获取的距离是由车用测距传感器传来的数据,是运用超声波来制作。这样就可以让行车人员在还没有发现危险隐患地时候,发出声光显示报警,好提醒驾驶员做出相应的安全操作,这样预警装置便可以完成多种的工作方式。
报警模块主要是利用喇叭发出报警声跟灯的闪烁来警示驾驶员注意开车。这样就可以实现当车辆在进入距离危险时能够对驾驶者提出警示。但由于电路的原因,还要用一个运算放大器来实现信号放大来完成报警。而实现报警的条件是在系统的设定的安全距离值中,当系统处理数据时,探测的距离小于或等于设定值时,蜂鸣器便会报警。提示驾驶员安全行驶,防止发生碰撞,而声光报警电路图如图2 所示。

图2 声光报警电路图
3.2 报警显示模块软件设计
防撞装置的微控软件跟硬件一同实现,来完成实物地展示。由此在硬件和软件的设计中,在信号控制上两者能够协调工作,使得软件的运行能够配合系统硬件的运行过程。且在工作的过程中,对于数据的存储保存在RAM中。而系统处理数据时,直接从RAM中获取并进行数据的转换处理。而当系统通过系统软件处理信息时,就会将所得出的结果传送给三位LED 显示器来显示。如图3 报警子程序控制流程图。
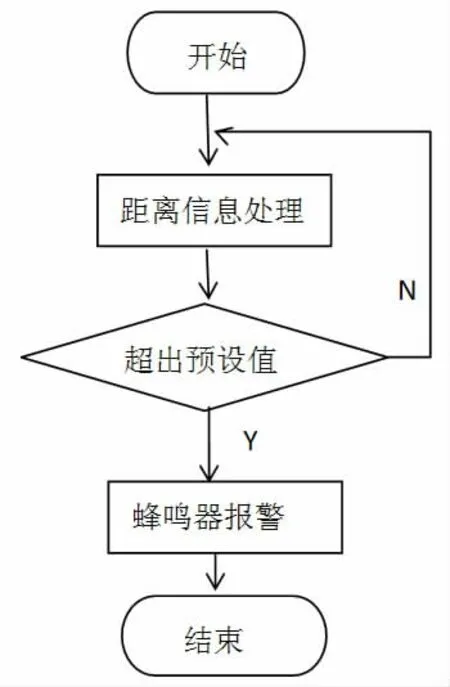
图3 报警子程序控制流程图
在处理距离报警模块时,可以清楚的了解车用传感器采集信息到报警过程的数据处理流程,而首要的距离信息获取是通过车用传感器来完成工作,而信息的处理过程主要是单片机系统控制完成,设定的区间范围距离信息会传给处理系统。由主系统控制,可以根据经过处理比较的信息数据,自主的判断,做出是否启动距离报警状态,系统会在车上做出相应的响应,发出相应的声光报警,这样可以起到警示驾驶员注意行驶车辆,防止车辆发生不必要的碰撞,造成人员伤亡或财产损失。依次完成一个工作循环。
4 系统自动控制的目的
4.1 一个驾驶员的心态、驾龄、开车时长及开车习惯等因素都有可能引起交通事故的发生,每年因为驾驶员操作不当出现很多交通事故,防撞系统具备很强的适应环境能力,系统的设计主要服务于驾驶员,起到提醒驾驶员的作用,给驾驶员预留出事件反映的时间,从而及时采取相应的措施,实现辅助车辆安全行驶[3]。
4.2 防止汽车在处于危险隐患环境下,而驾驶员并不知道,及时的提醒,使驾驶员时刻关注周围环境的变化,减少疲劳状态,提早做出反映及相应的动作。从而保护车辆及人员安全,起到了预防的作用。
4.3 提示行车员注意汽车跟旁边物体的间隔是否安全,好让行车员注意开车。当汽车离周围物体的间隔低于设定值,汽车处在危险范内,系统自动的就会发出警示的声音。且把探测到的距离传给LED 显示器,这样就可以让行车员很直观地看到汽车跟危险物的间隔,从而采取刹车或者变道等相关动作。当汽车与障碍物数据的比较,汽车处在一个安全的距离中,报警元件不会发出警示的声音。汽车可以正常行驶。
4.4 当车处在危险距离时,系统会自动的发出警报并有灯光闪烁提示,起到双重启示作用。
4.5 设计的防撞系统已经调试通过,自动控制技术得到了很好的运用,各个功能已经实现,运行效果良好,当车辆上安装防撞装置,在道路上行驶的车辆对人们生命的安全隐患将会有效降低,实现人与车,车与车和车与物之间的“安全”的目标。
