基于自动识别系统信息相关系数法的阵列幅相误差校准方案
2020-04-24岳显昌李宇环易先洲
刘 念, 岳显昌, 李宇环, 易先洲
(武汉大学电子信息学院,武汉 430072)
武汉大学研制的高频地波雷达利用多信号分类(multiple signal classification,MUSIC)算法从散射回波中提取海流的波达方向(direction of arrival,DOA)信息,进行中远距离(如200 km)的海洋表面流探测[1-2]。MUSIC算法实现的前提是对阵列流型的精确已知,然而,在实际应用中,由于阵列流型的实际值与标称值存在误差,实际接收数据的信号子空间与标称的阵列流型之间将不存在精确的正交关系,从而使MUSIC算法的海流方位估计性能急剧恶化,当偏差较大时其方位估计性能甚至会失效,因此阵列幅相误差校准方法在高频地波雷达海流反演中起着至关重要的作用[3-4]。
目前,阵列的幅相误差校正方法可以分为有源校正[5-7]和无源校正[8-11]两种。有源校正需要在空间设置方位精确已知的一个或多个辅助信源对阵列扰动参数进行离线估计,自校正方法通常根据某种优化函数对辅助信源的方位与阵列扰动参数进行联合估计。有源校正方法运算量小,不需要对信号源方位进行估计,但易受环境影响,且成本高,不利于长期实施和使用;无源校正方法不需要方位精确已知的辅助信源,但只能校正较小的幅相误差,参数估计的全局收敛性不能得到有效保证,且对雷达阵型有特定要求,适用范围具有局限性。因此,一种通用性强,成本低且不需要辅助信源的幅相误差校正方法是目前阵列校正的重要研究方向。
根据武汉大学海态实验室在福建沿海区域的天地波组网实验,选取东山高频地波雷达站的接收数据,采用本文方法进行阵列幅相误差校准,并对一天内校准结果的稳定性进行分析,对比校正前后赤湖站直达波DOA估计结果和海流反演结果,分析该方法对于MUSIC空间谱估计和海流探测性能的影响。实验结果验证了本文方法的有效性和准确性。
1 阵列信号模型及单辅助信源校正
假设高频地波雷达阵列是由M个阵元组成的二维平面阵,以第一个阵元为参考,其各阵元坐标为(xm,ym)(m=1,2,…,M),在存在幅相误差的情况下,每个阵元的幅相误差为Γm(Γ1=1),第v个窄带远场船舶信号方向为θv,入射到阵列模型如图1所示。
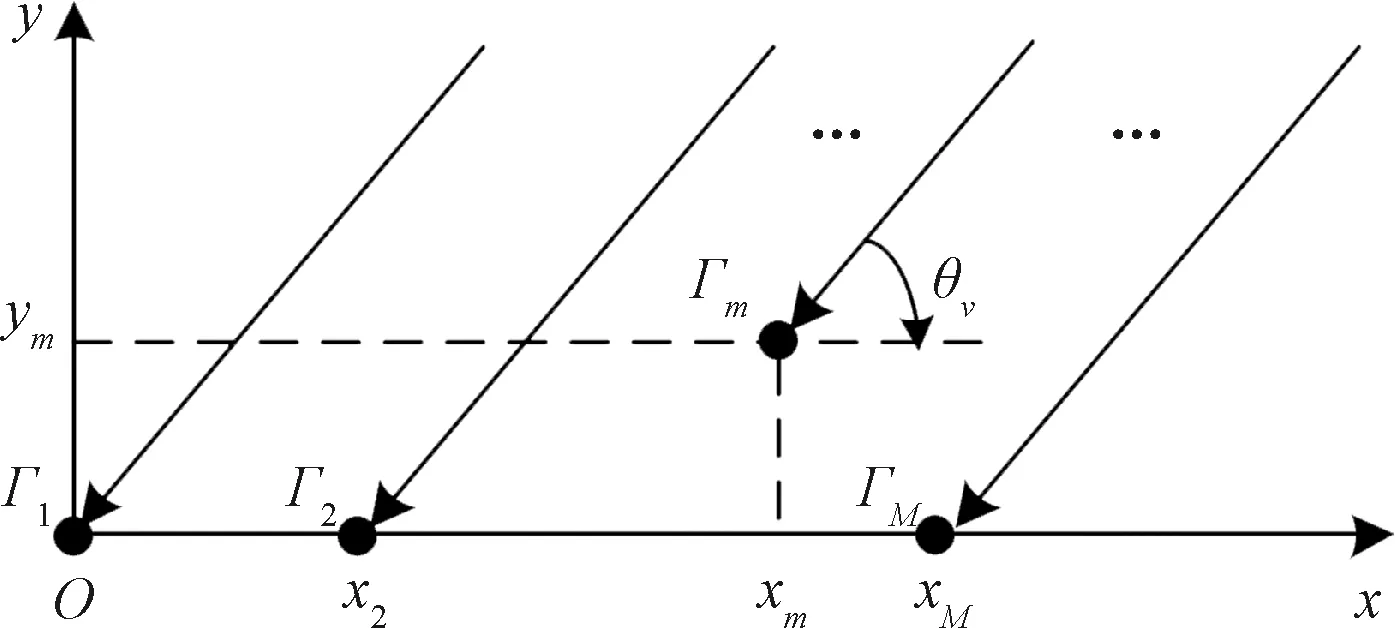
图1 存在幅相误差的天线阵列模型Fig.1 Array model with amplitude and phase errors
接收阵列的信号为
X(t)=Γvα(θv)sv(t)+N(t),t=1,2,…,L
(1)
式(1)中:L表示快拍数;Γv=diag[Γ1,Γ2,…,ΓM]表示M×M维阵列幅相误差对角阵,ΓM=gmejφm表示第m个阵元的幅相误差,gm表示第m个阵元的幅度误差,φm表示第m个阵元的相位误差;sv(t)为空间信号的1×L维矢量;N(t)为M×L维噪声数据矢量;α(θv)为空间阵列的M×1维导向矢量,且
遥感是获取地表及地物信息的一种重要手段,其实时、快速、准确及经济的特点,在地质灾害调查中发挥着越来越大的作用。利用遥感技术可以不断探测大量的地质信息,且遥感技术具有视野广阔的独特优势,结合GPS、GIS等新技术、新方法,可快速、全面、准确地查明地质灾害分布现状,提高地质灾害的调查精度和质量。遥感技术已成为开展地质灾害监测、调查、治理等最有效的方法和手段之一。
(2)
dm=xmcosθv+ymsinθv
(3)
式中:λ为信号波长;dm为第v个船只信号入射到第m个阵元相较于参考阵元的波程差。
阵列协方差矩阵可以表示为
(4)
式(4)中:E(·)为求数学期望。
对Rv(t)进行特征分解可得最大特征值对应的特征向量e1=[e11,e12,…,e1M]T,船舶信号为单个信源,e1与信号导向矢量α(θv)满足:
Γvα(θv)=qe1
(5)
Γvα(θv)=[1,Γ2β2,…,ΓMβM]T
(6)
2 基于AIS信息相关系数法的阵列幅相误差校准
由于成本低,便于实施等优势,利用高信噪比船只信号对阵列进行校准的方法在近年来得到了广泛的关注[13-15]。文献[13]通过检索高信噪比船只信号结合AIS信息对阵列通道进行校准。文献[14-15]通过视觉检索多普勒谱中随机存在高信噪比船只谱点对船只DOA和阵列信号幅相误差进行联合估计。这种检索过程是非常耗时的,且具有偶然性,不能满足同步校准的需求。针对这种不足,提出一种基于AIS信息和相关系数的阵列幅相误差校准方法。
雷达和AIS的信息数据率不同,雷达的探测数据率低,本文研究的高频地波雷达积累周期为10 min,而AIS系统的数据率高且具有可变性,一般为几十秒不等。由于雷达和AIS对同一目标测得的位置信息不可能来自同一时刻,所以在利用AIS信息进行阵列幅相误差校准时,首先要对雷达数据和AIS数据进行预处理,即让两个传感器的信息同步。在本文的高频地波雷达体制中,校准周期为10 min,雷达接收数据经第一次快速傅里叶变换后得到距离信息,该信息经第二次快速傅里叶变换(fast fourier transform,FFT)后得到运动目标的多普勒信息,至此可以确定有效的船舶信号相对于雷达站的距离、径向速度范围。
图2所示为东山站2016年1月22日通道3的距离速度谱,从图中可以看出,在200 km,径向速度为35 km/h的范围内并不能确定出明显的可用于校准的船只信号。从AIS数据中截取校准周期内存在数据的所有船舶信息,根据雷达站的位置信息计算出该时间段内相对于雷达站的距离、径向速度,剔除无法对应于多普勒谱的船舶信号,对筛选出船只10 min内计算所得的信息(相对于雷达站的距离、径向速度、经纬度)取均值即可同步于雷达数据。完成雷达数据和AIS信息的预处理后,可进行阵列幅相误差校准。
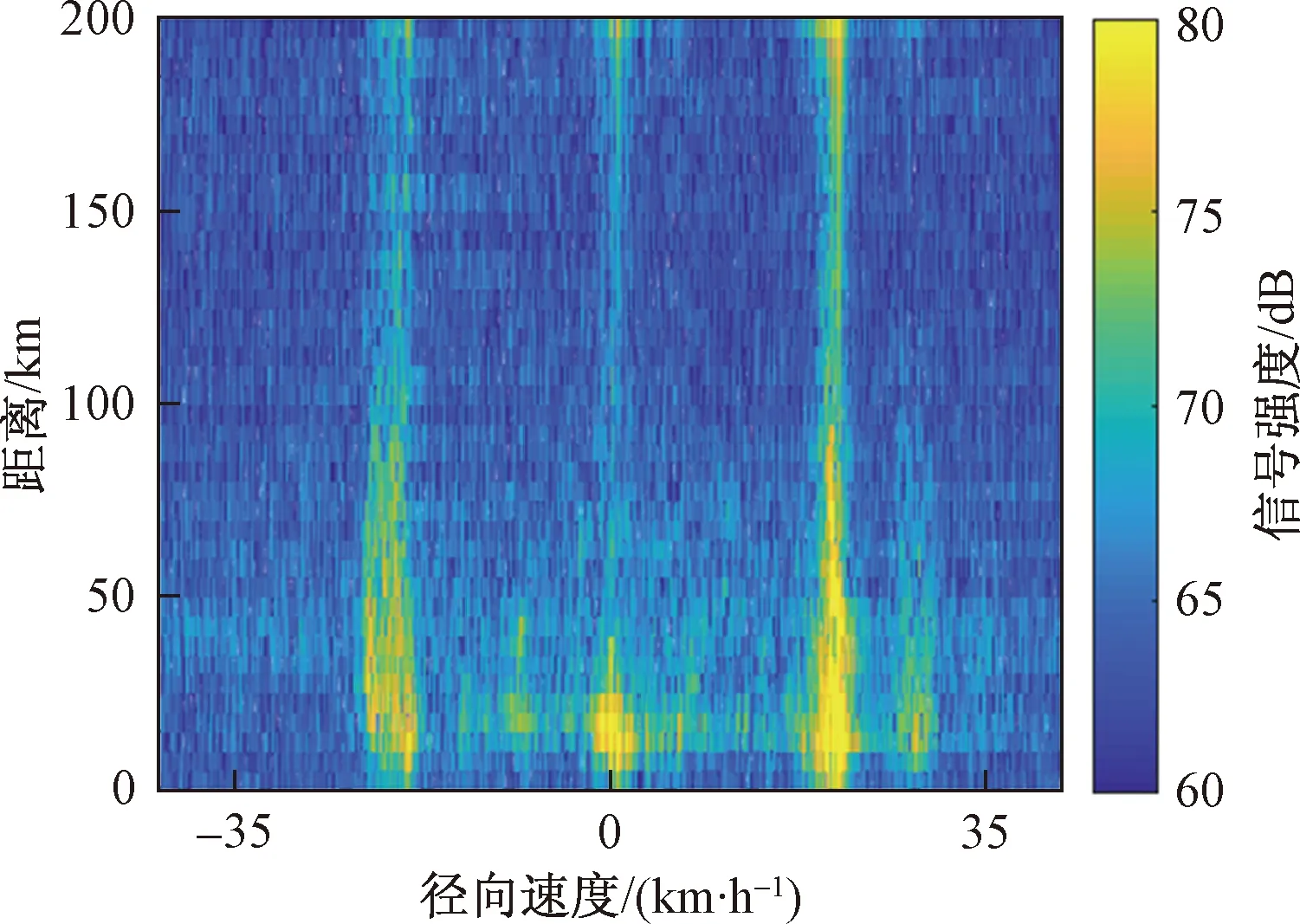
图2 东山站单通道的距离速度谱Fig.2 Distance-velocity spectrum of single channel at Dongshan station
假设船只信号均为单信源,一共筛选出V个可以对应于多普勒谱的船只回波信号,通过AIS数据提供的10 min内经纬度信息均值和高频地波雷达站的位置信息计算出V个船只信号的DOA,经第一部分介绍的单辅助信源校准法处理可以得到V个船只回波信号多普勒谱点对应的校准值数据集C={γ1,γ2,…,γV}。在进行阵列幅相误差校准时,幅度估计和相位估计分开进行,进行幅度估计时只保留C的幅度部分作为幅度校准数据集,进行相位估计时只保留C的相位部分作为相位校准数据集。
考虑到理想的单信源船只回波信号,不叠加其他信号,估算出的校准值逼近真值,所以这些信号估计出的校准值之间具有很高的相关系数。对于问题船只回波信号谱点估计出的校准值是随机分布的,如果对校准值不加区别的直接取均值,则会严重影响校正精度,因此必须将正确的校准结果从中分离。利用正确校准值之间的高相关性,对于校准值γv(v=1,2,…,V),分别计算它和其余各组校准值的相关系数:
(7)
式(7)中:j=1,2,…,V且j≠i;E(·)为求数学期望。
统计ρij大于0.95的个数Ni,重复上述步骤依次处理V组校准值,Nmax为最大Ni,Nmax对应的校准值γmax即为所求。
图3所示为东山站2016年1月22日上午01:10时的111艘船只信号用于相位误差估计时Ni按升序排列的统计结果。由于错误校准结果的随机性,和其余校准结果很难有0.95以上的相关系数,从图中可以看出,根据相关系数可以剔除错误校准结果,选取Ni=25的4组校准结果取均值,即为所求。
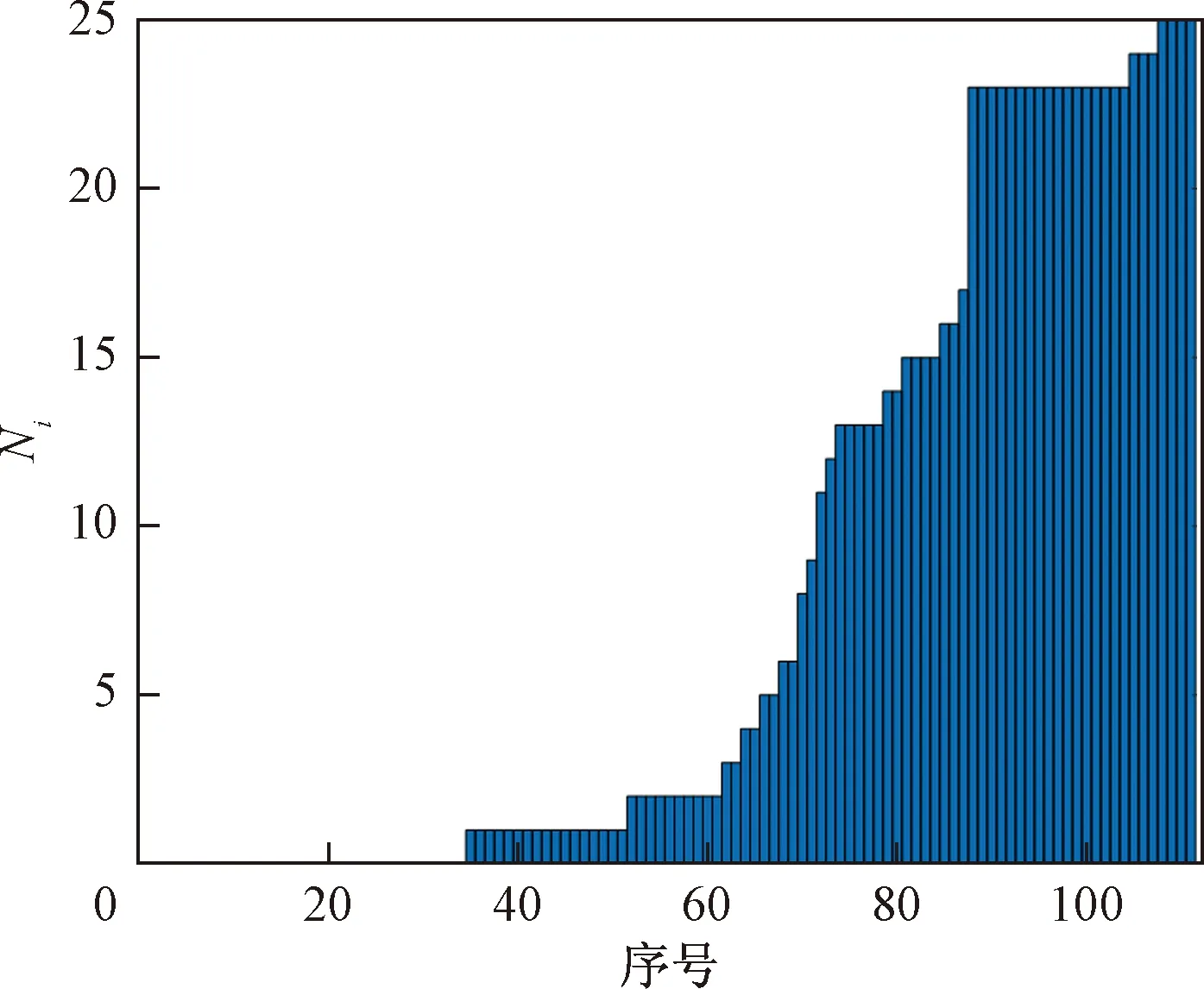
图3 东山站2016年1月22日上午0:10时的111艘 船只所得相位校准值间相关系数大于0.95的统计按 升序排列的柱状图Fig.3 A histogram of 111 vessels with correlation coefficients greater than 0.95 in ascending order at 01:10 AM on Jan 22nd, 2016 at Dongshan station
3 实测数据验证
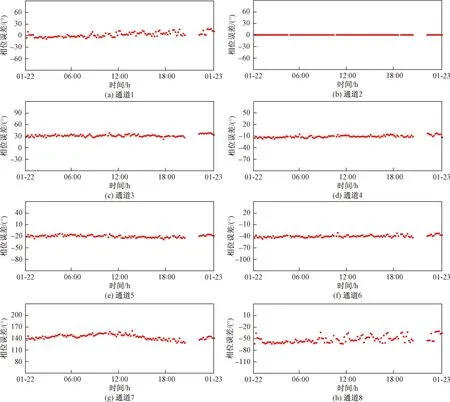
图4 2016年1月22日东山站阵列相位误差估计曲线Fig.4 Array phase errors estimation curve on Jan 22nd, 2016 at Dongshan station
利用上述方法对2016年1月22日东山站高频地波雷达探测数据进行分析。雷达工作频率为7.77 MHz,阵列为8元面阵,第二个阵元作为参考阵元,雷达接收沿海区域200 km以内的海洋回波和船只回波信号,相干积累时间为10 min,阵列校准值每10 min更新一次,雷达的距离分辨率为5 km。在雷达站附近布置AIS接收机,在实验中接收附近大约100 km范围内装有AIS设备的船只发出的AIS信息。AIS采用GPS提供位置信息精度远高于高频地波雷达,在忽略定位误差的情况下,将通过AIS数据和雷达站位置信息计算出的DOA作为真实的船只信号方位角。图4和图5所示分别为2016年1月22日东山高频地波雷达站阵列相位和幅度误差估计结果。表1所示为东山站校准结果的均值和标准差统计结果。
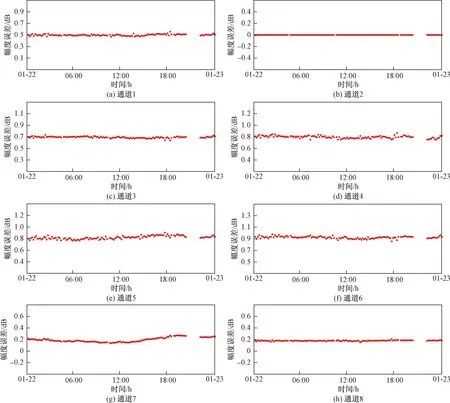
图5 2016年1月22日东山站阵列幅度误差估计曲线Fig.5 Array gain errors estimation curve on Jan 22nd, 2016 at Dongshan station
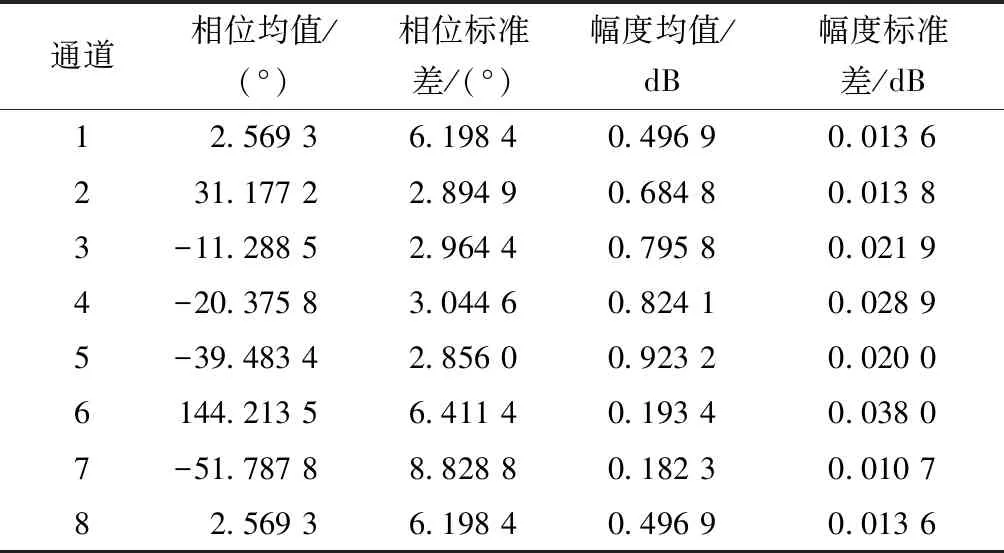
表1 东山站阵列幅相误差校准值统计结果Table 1 Statistical results of array calibration values of amplitude and phase errors for Dongshan station
从阵列幅相误差校准结果来看,以第二个阵元为参考阵元,第二部分所提方法估计出的幅相误差在24 h内基本保持平稳,相位误差的标准差在9°以内,比幅度误差的标准差在0.1 dB以内,新方法具有很好的稳定性。下面用赤湖站直达波信号的方位角信息来验证校准结果的准确性。东山站经纬度分别为117.48°和23.66°,赤湖站经纬度分别为117.90°和24.04°,通过位置信息可以计算出赤湖站直达波DOA的理论值为177°。
图6所示为东山站接收信号的距离多普勒谱,谱中包含了龙海、赤湖和东山三站的信号,根据各站预先设置的偏置信息和雷达站的地理位置可以将它们分离开。利用MUSIC算法对赤湖站直达波信号的DOA进行估计。
图7所示为1月22日01:10时校准前后赤湖站直达波DOA估计结果,可以看出,校准前MUSIC空间谱分辨率差且估计误差大,校准后MUSIC空间谱幅度有了显著的提升,角度分辨率提高,DOA估计值为176.5°,缩小误差在1°以内。
通过本文所提方法对阵列幅相误差进行校正,对校准后的数据利用MUSIC算法进行海流到达角估计,最终可以得到海流状态信息。图8所示为校准前后海洋表面径向流图,可以看出,校准后海流图的完整性和连续性都得到了明显提升。
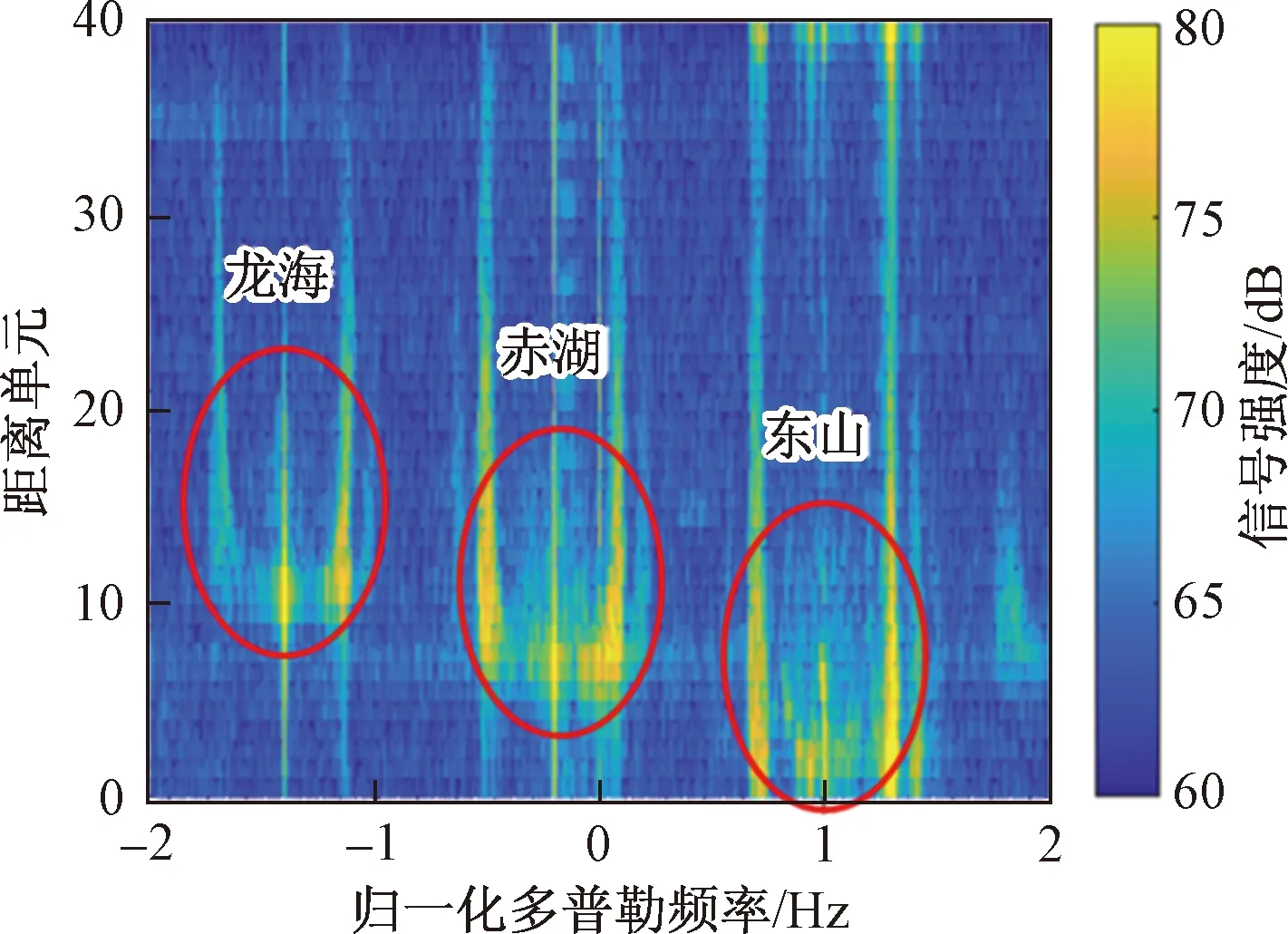
图6 2016年1月22日01:10时东山距离多普勒谱Fig.6 Doppler spectrum of Dongshan station at 01:10 AM on Jan 22nd, 2016
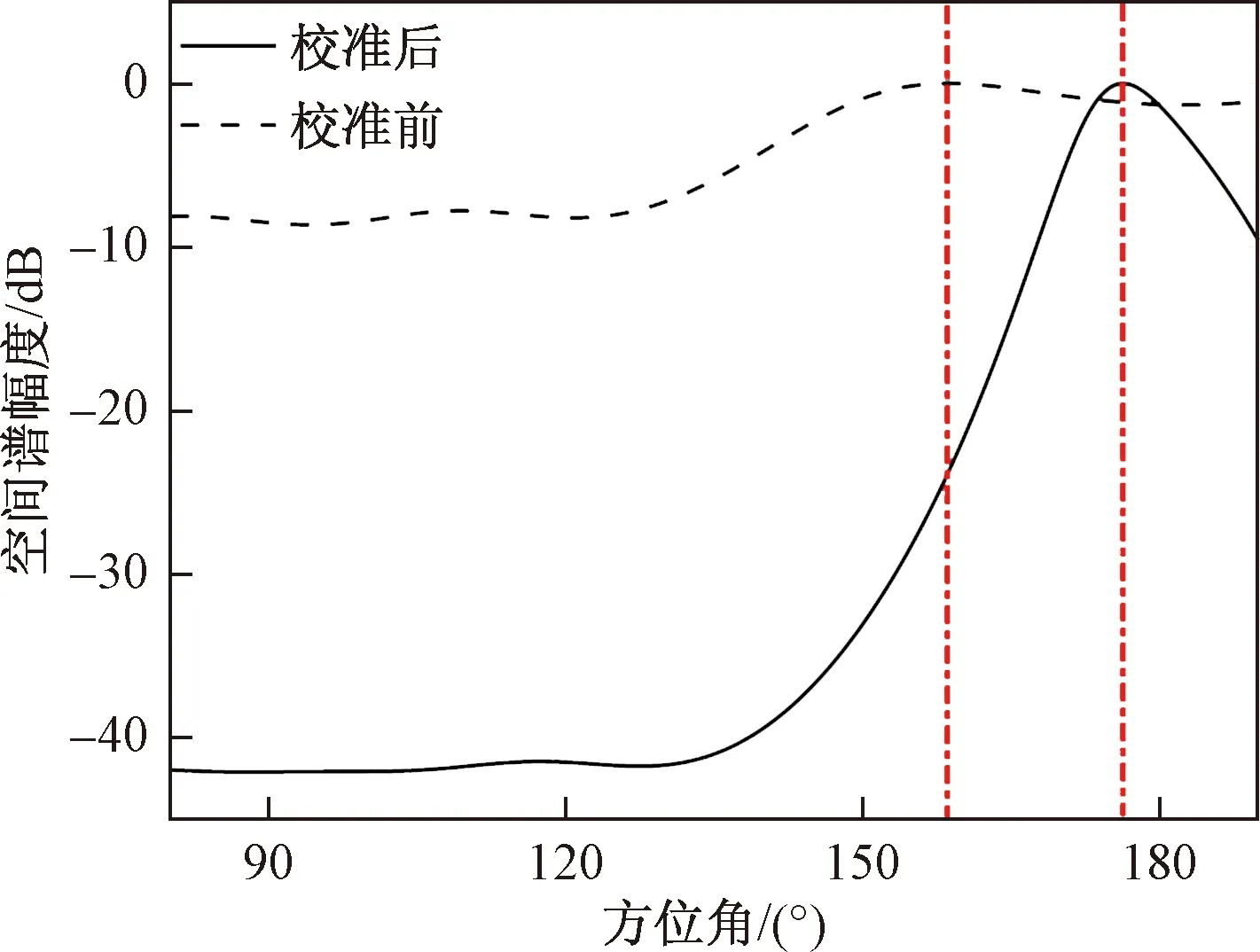
图7 2016年1月22日01:10时校准前后赤湖站 直达波MUSIC空间谱估计结果对比Fig.7 Comparison of MUSIC special spectrum estimation results of direct waves at Chihu station before and after calibration at 01:10 AM on Jan 22nd, 2016

图8 2016年1月22日01:10时校准前后的 东山站径向海流图Fig.8 Radial current map of Dongshan station before and after calibration at 01:10 AM on Jan 22nd, 2016
4 结论
阵列幅相误差的不一致性会严重影响MUSIC等超分辨算法的性能,甚至完全失效,因此必须进行校准。针对高频地波雷达系统提出了一种基于AIS信息和相关系数的阵列幅相误差校准方法,该方法不需要额外设置辅助校正信号源,节约成本且便于实施。相较于其他用船只进行阵列校准的方法,不需要筛选高信噪比随机存在的船只信号,耗时少且可进行同步校准。通过对实测数据进行处理分析,得到以下结论:
(1)本文方法得到的校准值在长时间内有很好的稳定性。
(2)校准前后MUSIC空间谱估计性能有了显著提高。
(3)校准前后径向海流图的完整性和连续性有了很大改善。
