基于CAN总线的底盘综合控制系统设计
2020-04-22崔晓琳
崔晓琳

摘 要:设计了基于CAN总线的底盘综合控制系统,主要包括对整车、四轮驱动、转向系统和制动系统的控制器设计。采用CAN总线实现电动汽车各控制器间的通信,并完成了 CAN 网络应用层协议的制订。在综合考虑相关影响因素基础上,设计了各控制器的硬件,建立伪逆控制分配算法实现常规的控制量分配,以及必要时实现控制再分配,保证车辆的操纵稳定性。系统的仿真结果表明,该系统可有效地完成常规和再分配控制量,兼顾电动汽车的灵活与稳定。
关键词:分布式驱动电动汽车; CAN总线; 底盘综合控制
中图分类号: TG409
文献标志码: A
Abstract:This paper completed the design of chassis integrated control system based on CAN bus. The design includes the vehicle, four-wheel drive, steering system and brake system controller. The system adopts CAN bus to realize electric vehicle controller, the communication between each formulation and the application layer protocol of the CAN network is completed. After considering relevant factors, the controller hardware is selected, pseudo-inverse control allocation algorithm is established to realize conventional control allocation. In the necessary case, the control of redistribution can be realized to ensure that the vehicle steering stability. The simulation results show that the system can effectively complete the conventional and redistribution control quantity, and give consideration to the flexibility and stability of electric vehicles.
Key words:Distributed drive electric vehicle; CAN bus; Integrated chassis control
0 引言
控制器局域網(CAN)具有构造简单、性能稳定、数据通信实时性强等优势,现阶段已在汽车领域广泛应用,并且形成了国际标准。作为绿色交通工具,电动汽车是目前国内外研究的热点,要使电动汽车得到广泛应用,其的综合性能是关键影响因素之一,对电动汽车的底盘综合控制系统的设计可有效解决这一问题[1]。
1 底盘控制系统的总体设计
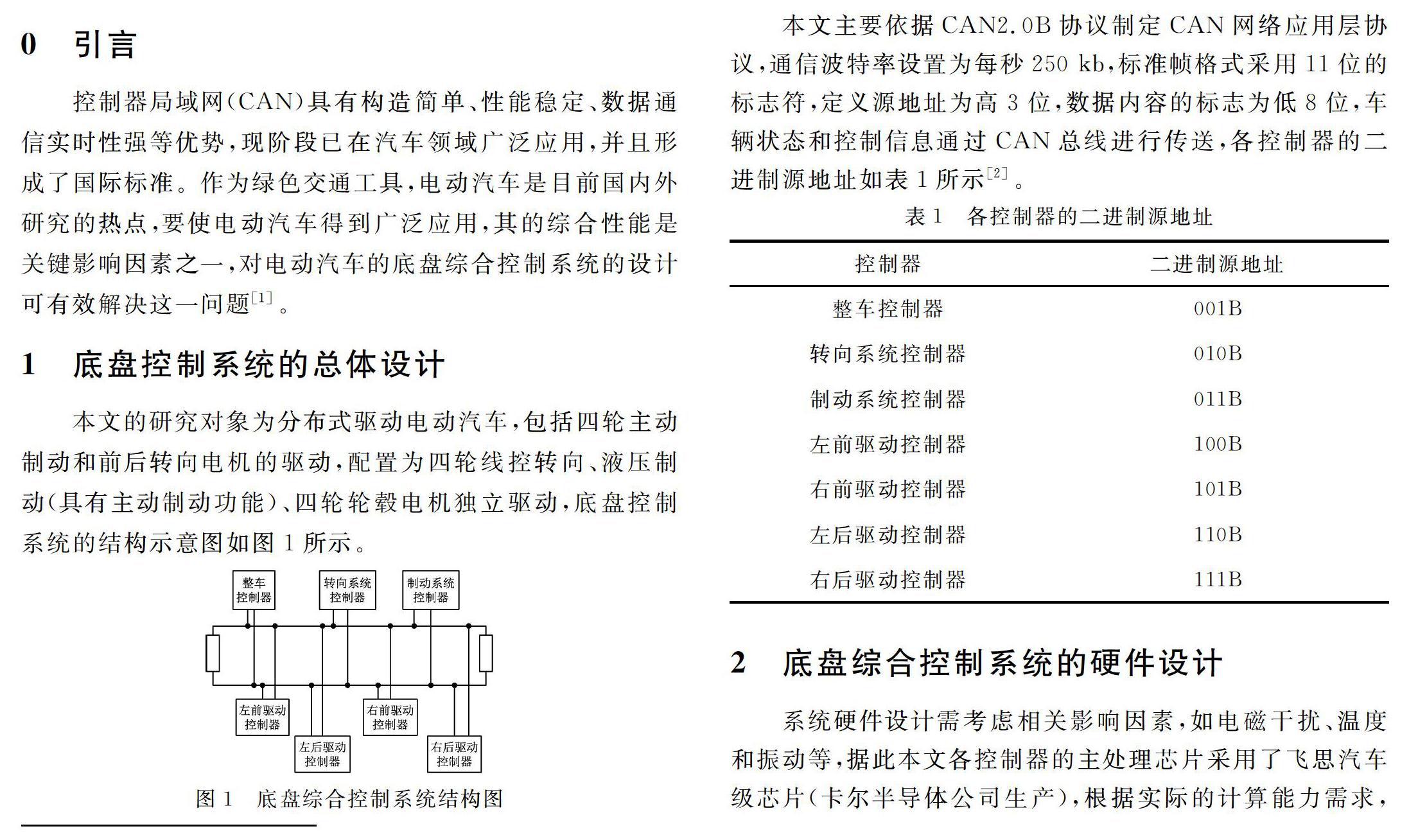
本文的研究对象为分布式驱动电动汽车,包括四轮主动制动和前后转向电机的驱动,配置为四轮线控转向、液压制动(具有主动制动功能)、四轮轮毂电机独立驱动,底盘控制系统的结构示意图如图1所示。
本文主要依据CAN2.0B 协议制定CAN网络应用层协议,通信波特率设置为每秒250 kb,标准帧格式采用11位的标志符,定义源地址为高3位,数据内容的标志为低8位,车辆状态和控制信息通过CAN总线进行传送,各控制器的二进制源地址如表1所示[2]。
2 底盘综合控制系统的硬件设计
系统硬件设计需考虑相关影响因素,如电磁干扰、温度和振动等,据此本文各控制器的主处理芯片采用了飞思汽车级芯片(卡尔半导体公司生产),根据实际的计算能力需求,各控制器的主处理芯片如表2所示。
在实验使用的电动车上,各控制器的控制电路用电源(12 V)供电,设计了电源转换电路转换为本文控制器所需的5 V电源。为保证CAN总线运行的可靠性,使用TJA1040作为接口芯片,高速光耦(U4 、 U5)具有隔离作用保护单片机,信号的滤波作用由L31完成。
2.1 整车控制器设计
作为电动汽车底盘控制系统的关键组成部分,整车控制器起到整体的协调控制作用,具体结构如图2所示。
主处理芯片采集转向盘转角信息、车身横摆角速度、加速踏板位置、侧向加速度信号,经滤波后被单片机采集。通过 CAN 总线,主处理芯片还采集轮速、转向角、故障信息等,发送执行机构的期望控制量至其它控制器上。个辅助处理芯片则可以完成主处理芯片故障的诊断。
2.2 驱动控制器设计
控制系统中,车轮的无刷直流轮毂电机由四轮驱动控制器控制,在正常情况下,整车控制器通过CAN 总线发出命令,驱动控制器接收后完成对轮毂电机的驱动力矩的控制,同时按照平均分配规则,采集加速踏板位置信号后,完成备用期望驱动力矩的计算,一旦整车控制器发生故障,对轮毂电机的控制可依据备用期望驱动力矩完成,通过霍尔传感器轮毂电机传递位置信息给驱动控制器[3]。
2.3 转向系统控制器设计
该模块主要负责采集并滤波处理车轮转向角和转向盘转角,然后传送给主处理芯片,根据转向盘转角信息,转向系统控制器完成期望前轮转向角的计算,并与整车控制器的值相加,得到总的车轮转向角。前、后车轮分别使用有刷直流电机作为转向电机,通过两个H 桥控制转向电机,最终实现前/后轮的左右偏转。
2.4 制动系统控制器设计
电动汽车上轮速的采集由磁电式轮速传感器完成,轮速信号的转换(将正弦波转换为方波信号)则由控制器中的NCV1124 芯片完成,并传送给主处理芯片。转换的同时诊断轮速传感器是否存在断路故障;控制器中,液压管路压力的调节通过控制线圈的通断实现,控制过程则由3个TLE6228 芯片实现,同时诊断线圈是否存在线路故障;制动系统的液压单元通过电机完成电压的增减,在控制器中,电机的通断由MOS 管完成控制。控制器采集四轮的轮速并据此完成车轮状态的判断,通过对电磁阀和电机状态的控制,实现车轮的驱动防滑、防抱死制动及主动增压制动等功能。
3 底盘综合控制系统的软件设计
3.1 基本控制分配算法的设计
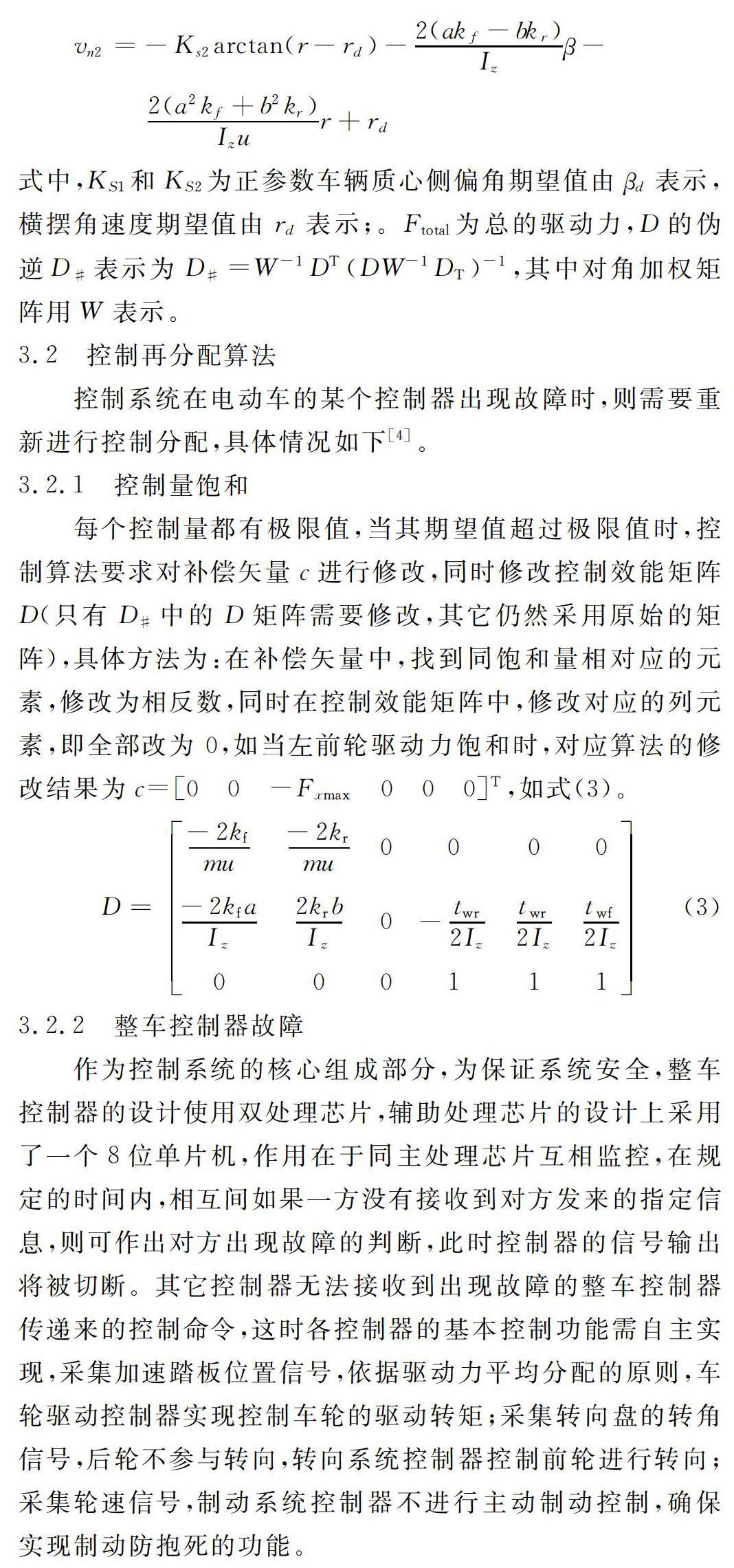
3.2.2 整车控制器故障
作为控制系统的核心组成部分,为保证系统安全,整车控制器的设计使用双处理芯片,辅助处理芯片的设计上采用了一个8位单片机,作用在于同主处理芯片互相监控,在规定的时间内,相互间如果一方没有接收到对方发来的指定信息,则可作出对方出现故障的判断,此时控制器的信号输出将被切断。其它控制器无法接收到出现故障的整车控制器传递来的控制命令,这时各控制器的基本控制功能需自主实现,采集加速踏板位置信号,依据驱动力平均分配的原则,车轮驱动控制器实现控制车轮的驱动转矩;采集转向盘的转角信号,后轮不参与转向,转向系统控制器控制前轮进行转向;采集轮速信号,制动系统控制器不进行主动制动控制,确保实现制动防抱死的功能。
3.2.3 车轮驱动系统故障
当至少一个车轮的轮毂电机(或驱动控制器)出现故障时,在伪逆控制分配算法中,控制算法会修改其使用的对角加权矩阵(W),具体方法为:找出对角加权矩阵中的对角元素(與出现故障的控制量相对应的),将其扩大1 000倍,有故障的车轮的驱动力通过此种方法可置为零,重新分配剩余没有发生故障的车轮的驱动力,同时为了抵消驱动力不对称所导致的横摆力矩,适当补偿车轮的转向角。
3.2.4 转向系统故障
这部分故障可分为控制器或转向电机的故障,若是控制器出现故障,此时整车控制器发挥作用,修改各执行机构的控制量,将其全部改为零,禁止汽车继续工作;若其中一个转向电机出现故障,控制算法会完成对另一个转向电机的控制,实现前轮/后轮转向,若两个电机同时出现故障,汽车停止工作。
3.2.5 制动系统故障
这部分出现故障时会导致控制器的防抱死失效,弱化主动制动功能,汽车恢复常规液压制动;汽车在制动系统液压回路发生故障时,制动失效的可能性极大,此时整车控制器发挥作用,修改各执行机构的控制量为零,禁止汽车继续工作[5]。
4 系统仿真测试
本文在 Matlab/Simulink 环境下完成对算法的仿真分析,结果表明与常规 4WS 的汽车相比,汽车采用控制分配算法后,对路径的跟随能力明显提升,且质心侧偏角较小,可见其稳定性更好,说明本文设计的基于 CAN 总线的底盘综合控制系统可有效分配执行机构的控制量,更好的地兼顾了驾驶意图和车辆的稳定性,某个控制器出现故障,电动车通过控制再分配算法仍具有良好的稳定性。
5 总结
本文完成了基于 CAN 总线的底盘综合控制系统的设计,主要包括对整车、四轮驱动、转向系统和制动系统的控制器设计,采用CAN 总线实现电动汽车各控制器间的通信,并完成了 CAN 网络应用层协议的制订,在综合考虑相关影响因素基础上,设计了各控制器的硬件,建立伪逆控制分配算法实现常规的控制量分配,以及必要时实现控制再分配,保证车辆的操纵稳定性。通过对系统进行仿真,结果表明,该系统可有效地完成常规和再分配控制量,兼顾电动汽车的灵活与稳定。
参考文献
[1] 李以农,杨阳,孙伟, 等. 电动汽车底盘一体化控制技术的发展趋势与展望[J].世界科技研究与发展,2016(3):481-491.
[2] 邓婕.CAN总线通信原理分析[J].电子设计工程,2012(7):104-107.
[3] 褚文博,罗禹贡,赵峰,等. 分布式驱动电动汽车驱动转矩协调控制[J]. 汽车工程, 2012(3):185-189.
[4] 褚文博,李深,江青云,等.基于多信息融合的全轮独立电驱动车辆车速估计[J].汽车工程, 2011(11):962-966.
[5] 陈无畏,汪洪波.基于功能分配的汽车悬架/转向系统可拓控制及稳定性分析[J].机械工程学报,2013(24):67-75.
(收稿日期: 2018.06.28)
