一种基于均值滤波和梯度影响因子的滤波算法
2020-04-22魏松涛何文思
魏松涛,何文思
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
0 引言
数字图像采集过程中会引入各种噪声,在进行图像处理之前要对图像进行滤波[1]。在图像处理、计算机视觉等相关领域,滤波是重要的基础研究之一,因此研究一种较为有效的滤波方法极为重要。当前,图像滤波方法主要分为空域滤波和频域滤波两类。空域滤波通常是采用邻域内像素进行加权平均的方法降低噪声,常用的空域滤波方法有中值滤波[2]、高斯滤波[3]、双边滤波[4]。频域滤波将图像转换到频域,根据噪声和图像频谱的分布差异,对噪声所在的频率范围设计相应的滤波器,去除图像中的噪声,最后将滤波后的图像从频域转换到空域[5]。常用的频域滤波方法有Wiener滤波、小波变换[6]。空域滤波和频域滤波对图像每个像素点都进行相同的操作,在滤波的同时对图像的边缘进行了不同程度的模糊。
均值滤波是一种常用的空域线性滤波方法,该方法运算过程相对简单,对高斯噪声具有良好的去噪能力。均值滤波是采用卷积核内像素灰度值的算术平均值代替卷积核中心像素灰度值。在计算卷积核中心像素灰度值时卷积核内像素的权重相同,实际上在卷积核不同位置对中心像素的影响不同,应该使用不同的权重。因为在均值滤波时卷积核内权重相同,所以在滤波的同时会破坏图像高频细节,使图像模糊。
1 基于均值滤波和梯度影响因子的滤波算法
1.1 均值滤波
均值滤波是将卷积核覆盖下原图像所有点的像素值进行求和,然后求平均值的过程。具体过程是先确定卷积核的大小,比如可以选定卷积核为3×3,然后对卷积核所覆盖下原图像9个像素值进行求和,再求平均值,最后求得的平均值作为新图像中卷积核中心所对应位置的像素值。用f(x,y)表示原图像在(x,y)点处的像素值,用w(x,y)表示均值滤波后(x,y)点处的像素值,可以用公式(1)表示f(x,y)和w(x,y)之间的关系。式(1)中的i、j是在卷积核内所对应的位置,m表示卷积核中元素的个数。对于3×3的卷积核用公式(2)表示。在卷积核覆盖下每个原图像像素值所占的权重都是一样的。这样做虽然达到了滤波的目的,但是导致很多细边缘很难保留下来。
(1)
(2)
1.2 Sobel算子
对于图像f(x,y),在(x,y)点处的梯度用公式(3)计算。梯度的幅值大小用公式(4)计算。图1中的符号表示3×3卷积核覆盖区域内像素点的灰度值,图1中的z5表示图像任意位置(x,y)图像的灰度值。在中心系数上使用权值2得到Sobel算子的导数如公式(5)所示[7],Sobel算子的卷积核如图2和图3所示。
(3)
(4)
(5)
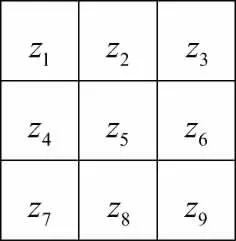
图1 卷积核覆盖下的像素值
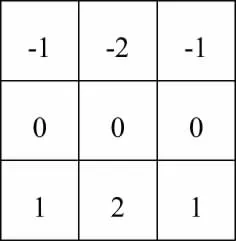
图2 x方向卷积核
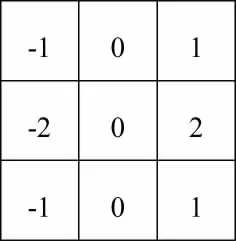
图3 y方向卷积核
1.3 梯度影响因子滤波算法
结合均值滤波和梯度影响因子进行滤波,主要是为了在滤波的同时对细边缘进行保护。主要思路是由于非边缘区域在卷积核内其梯度波动较小,故中心点外的像素值对中心点像素值的贡献较大,因此对于非边缘区域不会对边缘产生较大的影响;在边缘区域时,应该使中心点外非边缘上点的像素值对中心点像素值的贡献较小,这样对边缘产生的影响较小。可以构造函数如公式(6)所示,公式(7)为梯度影响因子,将公式(7)代入公式(6)中,公式(6)可以写为公式(8)。
(6)
d(i,j,k,l)=exp(-(gij-gkl)2/(2σ2)
(7)
(8)
1.4 梯度影响因子展开为多项式
在编程过程中直接用公式(7)所表示的梯度影响因子编程所消耗的时间较多,因此可以将其用公式(9)的形式展开为多项式,展开的梯度影响因子用公式(10)表示。在具体实现时根据实际要求选择合适的n值。
(9)
(10)
2 实验结果
2.1 滤波效果
以lena图像作为实验图像,分别进行均值滤波和改进算法滤波,并对细节部分进行对比。均值滤波和改进算法滤波如图4所示。图5和图6为均值滤波算法和改进算法细节对比,从图5中可以看出采用改进算法滤波后图像帽子上的细节纹理清晰。在lena原图像上添加高斯噪声并分别进行滤波,滤波效果如图7所示。

图4 图像滤波细节对比
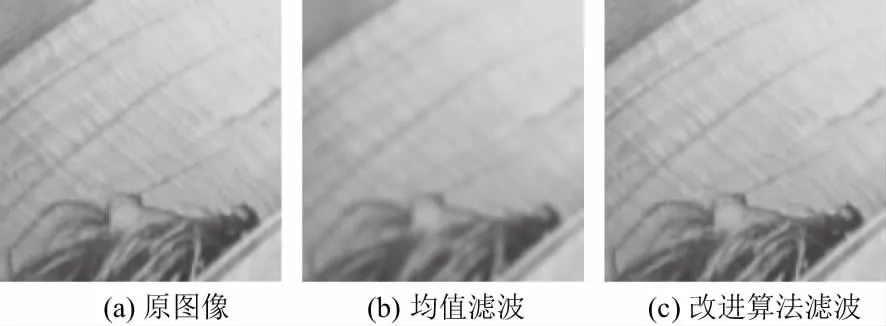
图5 细节1对比

图6 细节2对比

图7 添加高斯噪声滤波效果
2.2 评价参数
为了评价图像滤波效果,选择图像的均值、熵、标准差、平均梯度值作为评价参数(表1)。均值表示图像的亮度,熵表示图像间的一致性[8],标准差表示灰度值的分散程度,平均梯度值表示图像相对清晰程度。从表1中可以看出:滤波前后图像均值保持一致,图像亮度变化小;改进算法滤波图像的熵和原图像的熵更为接近,并且大于均值滤波图像的熵,这说明改进算法能够保证灰度图像的一致性;改进算法滤波图像的平均梯度值远高于均值滤波图像的平均梯度值,这说明改进算法很好地保护了图像的细节。

表1 评价参数
2.3 峰值信噪比
峰值信噪比(peak signal to noise ratio,RSNR)表示信号最大可能功率和影响信号表示精度的破坏性噪声功率的比值[9]。峰值信噪比是图像失真的度量,并且和均方误差(mean square error,MSE)相关。均方误差如公式(11)所示[10]。在公式(11)中f是输入图像,w是输出图像,M和N分别是图像的行数和列数。用公式(12)计算图像的峰值信噪比。公式(12)中的L表示图像点颜色的最大值。
(11)
(12)
对lena原图像采用均值滤波和改进算法滤波,对滤波后的图像分别计算峰值信噪比,同理对添加高斯噪声的lena图像也进行同样的操作。从表2中可以看出改进滤波算法滤波图像的峰值信噪比远高于均值滤波图像的峰值信噪比,说明改进算法的滤波效果比均值滤波效果好。
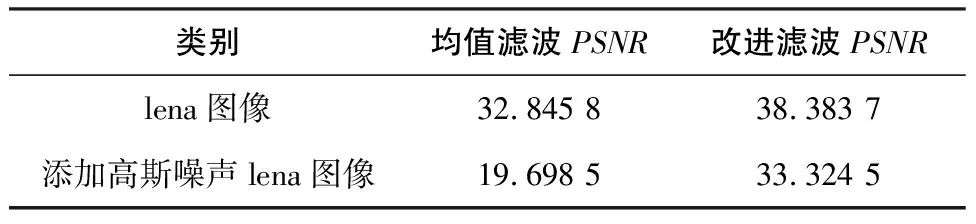
表2 PSNR值对比 单位:dB
3 结语
本文针对均值滤波卷积核内像素使用相同的权重会破坏图像边缘信息这一问题提出了改进算法。改进滤波算法增加了梯度影响因子,根据梯度影响因子自动分配卷积核内像素的权重,在卷积核内边缘上的像素点权重较大,而非边缘上的像素点权重较小。改进算法对图像滤波的同时能够较好地保护图像的细节和边缘,同时也达到了良好的滤波效果。改进算法引入了梯度影响因子,增加了算法的复杂度,故将进一步研究在保证改进算法效果的同时降低算法复杂度。
