潜伏式武器水下施放后初始运动过程仿真
2020-04-22练永庆宋保维李宗吉
练永庆,宋保维,李宗吉
(1. 西北工业大学 航海学院,陕西 西安 710072;2. 海军工程大学兵器工程学院,湖北 武汉 430033)
0 引 言
随着海上斗争区域逐渐转向深海,深海潜伏式武器[1]等将逐渐登上战场。水下平台如潜艇作为水下隐蔽作战平台,将是运送和搭载该类武器的最佳平台之一。由于所研究的潜伏式武器口径大于现有鱼雷发射管口径,因此无法通过鱼雷发射装置[2]进行发射或布放。因此采用外部挂载的方式是潜艇等水下平台携带及施放潜伏式武器的有效方法之一。潜艇外搭载武器方面国外早已有一定的应用[3-5],国内也开展了部分研究[6]。在潜伏式武器以及水下平台外挂装置的总体论证研究中,武器施放后的初始运动规律是其所关注的重点之一,为此本文通过建立潜伏式武器施放后水下运动过程相关数学模型并进行仿真计算,对潜伏式武器施放后初始阶段的运动特性进行进行定量分析,从而为潜伏式武器及潜艇外挂装置的总体方案设计和论证提供理论依据。
1 潜伏式武器水下施放方案简介
本文研究的武器水下施放的方案如见图1所示。该方案的运载装置外挂架通过连接紧固机构固定在潜艇底部,在潜艇航行到预定区域需投放武器时,首先通过艇内的仪器对武器进行初始发射参数设定。完成设定后,则通过运载装置的操纵控制设备首先对模块储放箱的底部挡板进行解锁,再通过液压开闭结构将底部挡板打开,这时武器在其负浮力的作用下离开外挂架,开始初始运动。本文主要对武器施放后的水下纵平面初始运动进行建模与仿真研究。
2 潜伏式武器水下施放后纵平面运动数学模型
2.1 建模坐标系简介
在武器水下纵平面运动建模与仿真中,采用2种坐标系:固定坐标系(简称“定系”)和运动坐标系(简称“动系”),如图2所示。

图 1 施放方案原理图Fig. 1Schematic diagram of the weapon underwater deployment
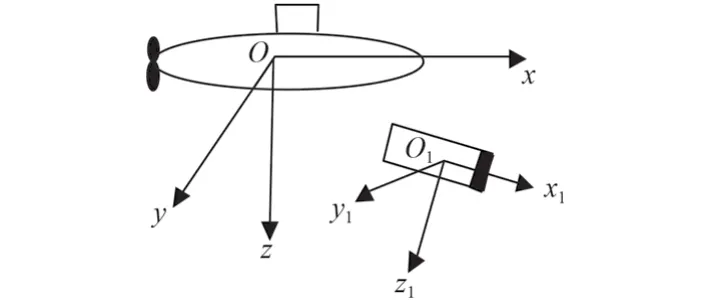
图 2 固定坐标系和运动坐标系Fig. 2Fixed coordinate system & moving coordinate system
为了简化建模过程,建模中不考虑水下海流的影响。
2.2 潜伏式武器水下运动数学模型
当武器施放后,武器在自身负浮力作用下作下沉运动。同时由于武器重心与浮心不在同一位置,武器还将绕其形心作旋转运动。因此该阶段的运动为武器整体向下运动的同时作绕自身的旋转运动,经推导,该阶段的纵平面运动方程如下:
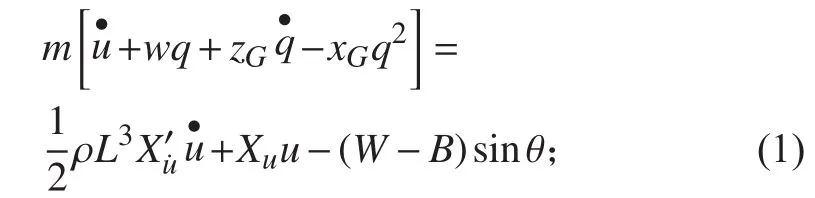
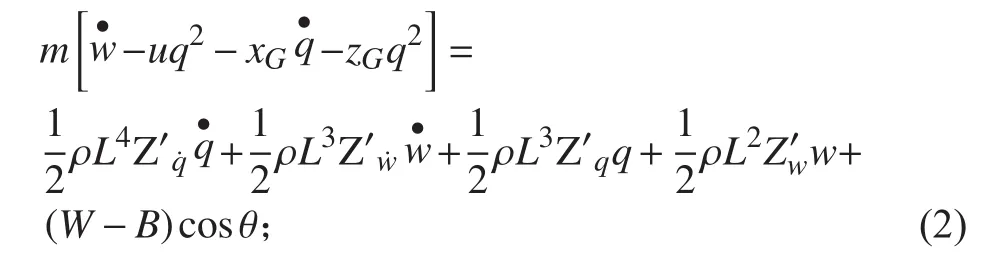

解以上方程可得在运动坐标系下的潜伏式武器任一时刻质心的加速度和绕质心的角加速度。
武器在固定坐标系下任一时刻的位置为:
式中:vx、vz分别为武器在固定坐标系下x轴、z轴方向速度,可按下式计算:

武器在任一时刻的姿态角为:

3 仿真结果与分析
3.1 标准参数仿真结果
将参数的初始值代入到仿真模型中进行运行仿真,得到武器的潜深曲线、速度曲线、速度曲线、纵倾角变化曲线(见图3~图7)。
为了更加直观反映武器在下落时初始阶段的姿态变化,仿真中给出初始段(0-5 s)武器的姿态变化图(见图7),图中直线表示为武器中心轴线,圆圈表示武器底部。
从以上仿真结果可以看出:
1)武器在施放后,由于武器的重心与形心(动坐标原点)不重合,因此武器除了自身转动外(见图7),其重心还围绕施放点垂线作类似钟摆运动(见图3),并经过一段时间的摆动后,最终保持竖直下沉方向。
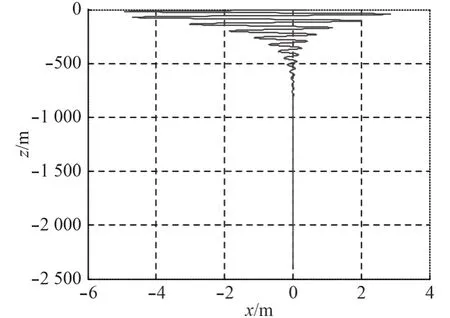
图 3 潜深曲线图Fig. 3The curve of the weapon diving depth in vertical plane
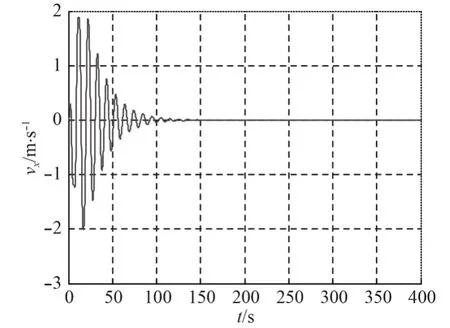
图 4 速度曲线Fig. 4The curve of the weapon's x direction velocity in vertical plane
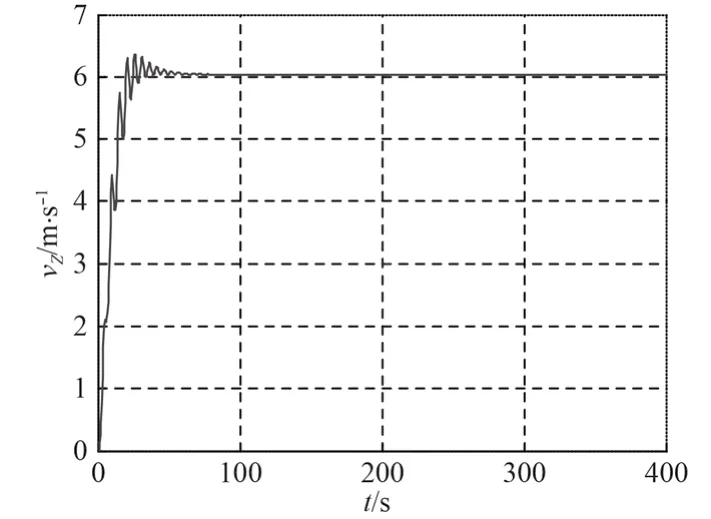
图 5 速度曲线Fig. 5The curve of the weapon's z direction velocity in vertical plane
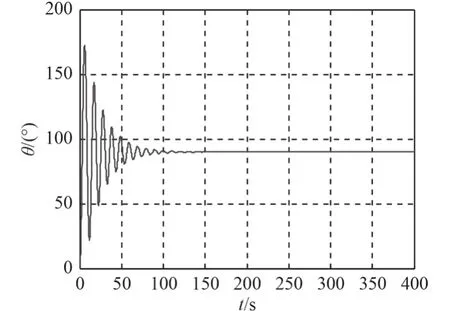
图 6 纵倾角变化曲线Fig. 6The curves of the weapon's pitch angles
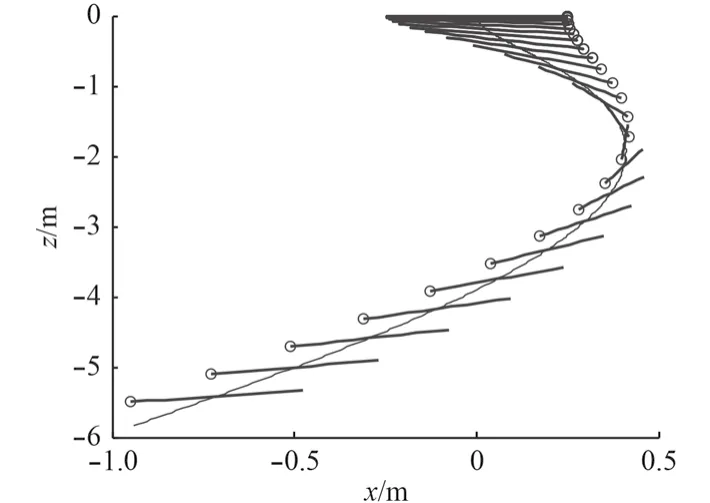
图 7 0-5 s内姿态变化图Fig. 7The weapon's movement posture changes in 5 s
4)由纵倾角仿真曲线(见图6)可见,因武器绕自身转动,则纵倾角上则是在附近震荡,并最终经过一段时间后,最终纵倾角趋向于。
3.2 变参数仿真结果
为了进一步分析潜艇平台及武器的主要参数对其水下运动的影响,在标准参数仿真模型的基础上,逐一改变标准参数中的武器的负浮力、初始速度以及转动惯量,分别进行仿真以研究这些参数对武器的施放过程以及运动的影响规律。
1)改变武器负浮力的仿真
从仿真的结果可以看出:
2)改变武器初始速度的仿真
仿真中的武器初始速度可以认为是潜艇平台在运动中进行武器施放时武器在离开潜艇瞬间将带上的初速。将武器的初始速度分别设定为,,进行仿真,仿真的结果如图12~图15所示。
从仿真的结果可见,改变武器的初始速度,主要对武器落点位置有影响,初始速度越大,武器落点离施放开始位置的距离越大,如初始速度时,落点将距离施放点约15 m左右、当,落点将距离施放点约30 m左右(见图12)。而且由于海水阻力的作用,武器轴方向的速度终将趋于0。武器的初始速度对的初始增加段有一定影响,对稳定后的速度值无影响(见图14),武器的初始速度纵倾角基本没有影响(见图15)。

图 8 潜深曲线(变负浮力)Fig. 8The curve of the weapon diving depth in vertical plane according to the negative buoyancy
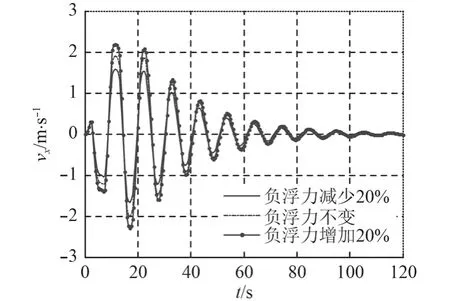
图 9 速度曲线(变负浮力)Fig. 9The curve of the weapon's x direction velocity in vertical plane according to the negative buoyancy
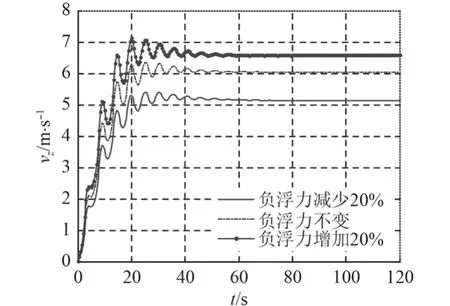
图 10 速度曲线(变负浮力)Fig. 10The curve of the weapon's z direction velocity in vertical plane according to the negative buoyancy

图 11 纵倾角变化曲线(变负浮力)Fig. 11The curves of the weapon's pitch angles according to the negative buoyancy
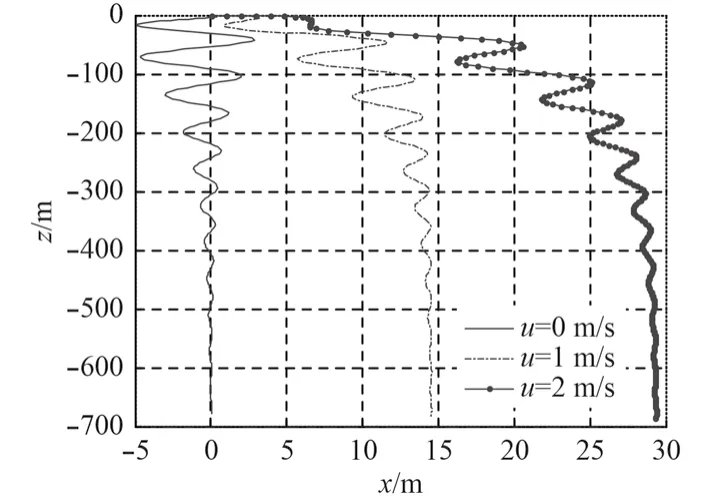
图 12 潜深曲线(变初速)Fig. 12The curve of the weapon diving depth in vertical plane according to its initial velocity
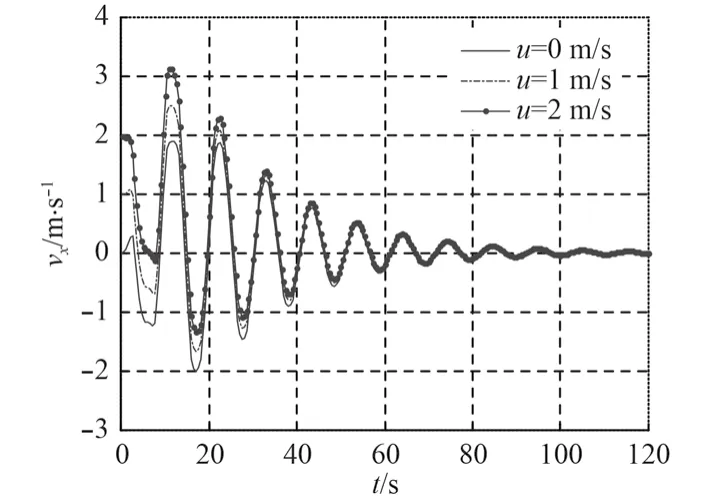
图 13 速度曲线(变初速)Fig. 13The curve of the weapon's x direction velocity in vertical plane according to its initial velocity
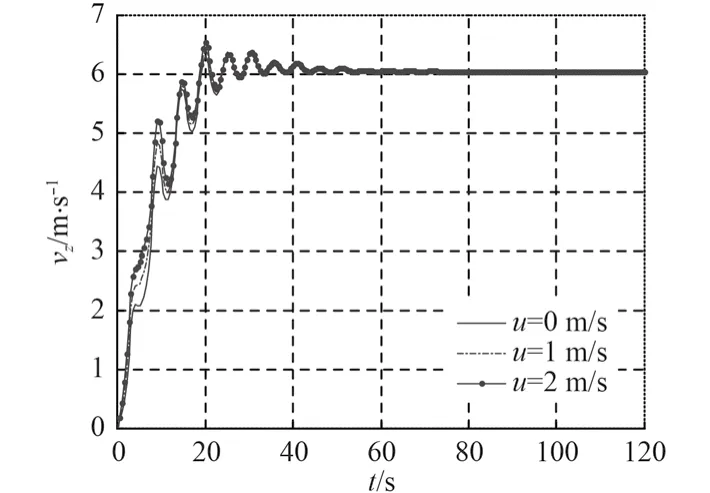
图 14 速度曲线(变初速)Fig. 14The curve of the weapon's z direction velocity in vertical plane according to its initial velocity
3)改变武器转动惯量的仿真
将武器绕y1轴的转动惯量标准参数基础上分别设定为减少1 0%()、不变()、增加10%()进行仿真,仿真的结果如图16~图19所示。
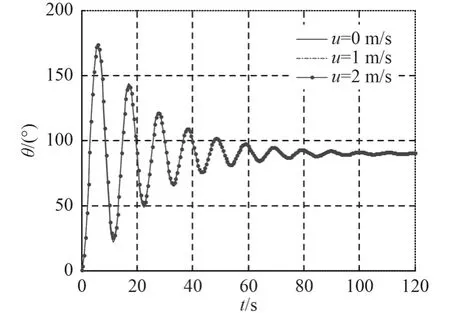
图 15 垂直面的纵倾角变化曲线(变初速)Fig. 15The curves of the weapon's pitch angles according to its initial velocity
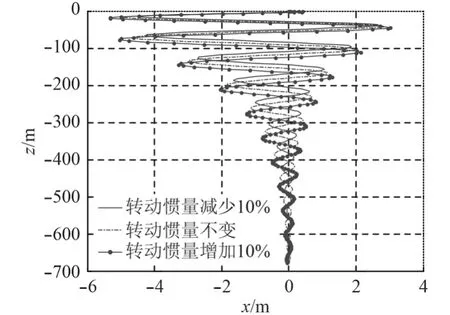
图 16 潜深曲线(变转动惯量)Fig. 16The curve of the weapon diving depth in vertical plane according to its moment of inertia
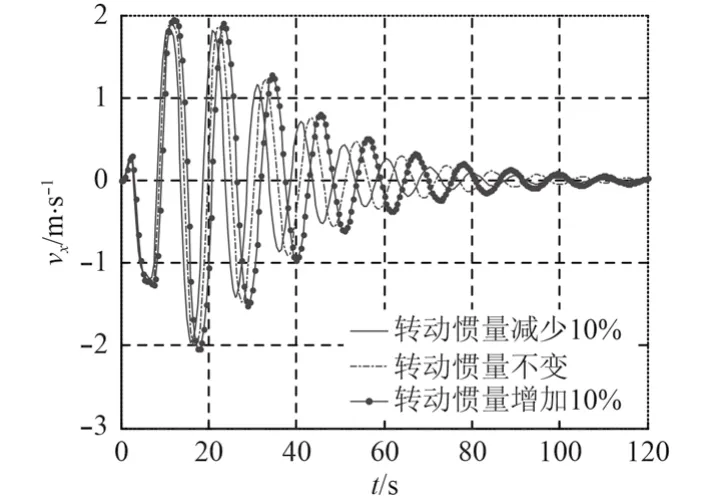
图 17 速度曲线(变转动惯量)Fig. 17The curve of the weapon's x direction velocity in vertical plane according to its moment of inertia
4 结 语
为了研究潜伏式武器水下施放后初始阶段的运动规律,建立潜伏式武器水下施放后的初始阶段运动模型并进行仿真分析。从仿真结果可知,无动力的潜伏式武器施放后,由于武器的重心和浮心不在其形心处,因此在投放后的武器初期运动为形心的下沉运动与绕形心钟摆式转动,这种摆动随着下沉深度加大幅度逐渐减小直至成垂直下沉状态。在这阶段中,武器水平初始速度、负浮力以及转动惯量等对其运动有影响。水平初始速度主要对武器落点位置有影响,初始速度越大,武器落点离施放开始位置的距离越大;负浮力对武器稳定后z方向的运动速度影响较大,随着负浮力的增大而相应增大;而转动惯量则主要影响投放开始过程武器自身转动幅度及趋于稳定的时间。从仿真结果分析可见,所建立的模型基本正确,能反映武器施放后各阶段的基本运动规律。后续将在现有模型基础上增加海底涌浪影响模块,完善整个运动模型,以便更好地为潜伏式武器及水下平台外挂装置的总体设计论证提供理论支撑。
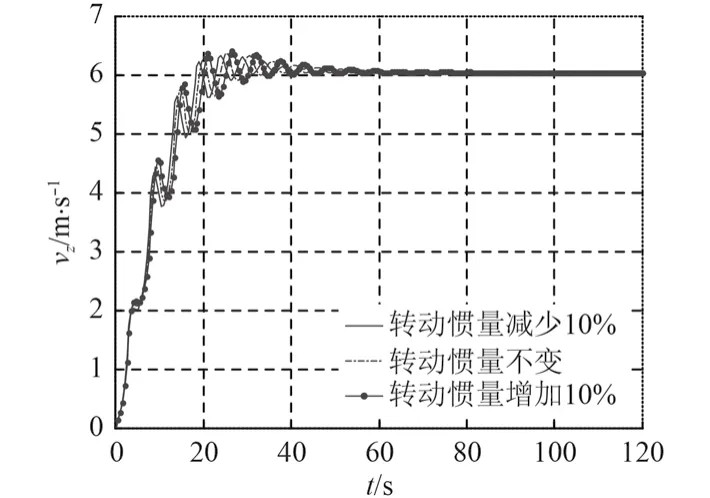
图 18 速度曲线(变转动惯量)Fig. 18The curve of the weapon's z direction velocity in vertical plane according to its moment of inertia

图 19 纵倾角变化曲线(变转动惯量)Fig. 19The curves of the weapon's pitch angles according to its moment of inertia