阻流板对滑行艇阻力性能的影响
2020-04-22申云磊高霄鹏霍聪
申云磊,高霄鹏,霍聪
(海军工程大学 舰船与海洋学院,湖北 武汉 430033)
0 引 言
滑行艇是一种依靠水动升力支撑艇重,将艇体托出水面,从而进入滑行状态的高速快艇,由于其外形简单,工业技术要求低,发展时间长,因此广泛应用于军民领域[1]。随着无人技术拓展到海洋空间,水面无人艇作为一种智能舰艇受到广泛关注,滑行艇因为其优越的水动力性能,成为目前无人艇应用最多的高性能船型[2]。
滑行艇的水动力性能在艇体型线确定以后,通过增加阻流板、尾板、楔形块等附体改善其性能成为最常见和有效的方法。其中,阻流板是一种垂直对称安装在尾封板下沿的平板,通过超出艇底部分的细长区域影响滑行艇的水动力性能。阻流板的安装及有效参数如图1所示。图中参数d和s分别表示阻流板的作用深度和宽度。相对其他附体,阻流板的研究开展较晚。文献[3]利用CFD方法研究了阻流板对约40 m滑行艇的阻力性能影响,在中低速工况下降阻效果明显。文献[4 - 6]对阻流板的作用机制进行了研究,发现阻流板前部小范围内形成水流漩涡影响了艇底的压力分布,阻流板的作用效果除了与深度d和和宽度s有关外,与滑行艇的边界层厚度也有很大关系。文献[7 - 8]采用模型试验得到了针对特殊船型的阻流板参数。但是对于阻流板的选择,目前仍没有很好的选择标准,阻流板作用太小不能达到理想的效果,太大则会引发阻力性能恶化以及埋首现象。因此,本文通过模型试验对某新型滑行艇进行阻力性能试验研究,对比了不同深度的阻流板对模型静水阻力和运动姿态的影响效果。在此基础上利用CFD技术,通过Star-CCM+软件平台对滑行艇的静水拖航试验进行模拟,对阻流板的作用机制进行了分析。
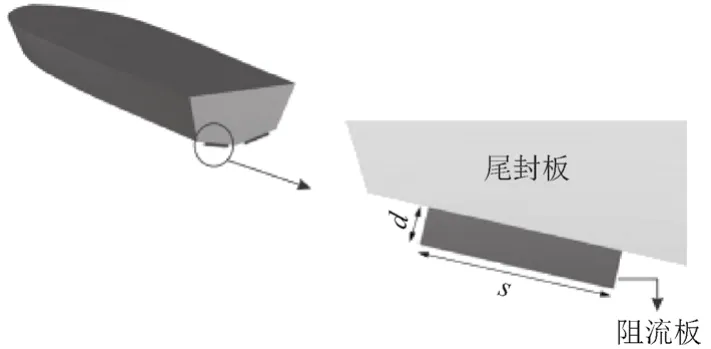
图 1 阻流板示意图Fig. 1Implementation of an interceptor aft of a planning boat
1 模型试验
1.1 模型主尺度
该艇采用细长三角形滑行底面与深V滑行艇前舭的复合型设计,模型的无量纲化参数见表1。
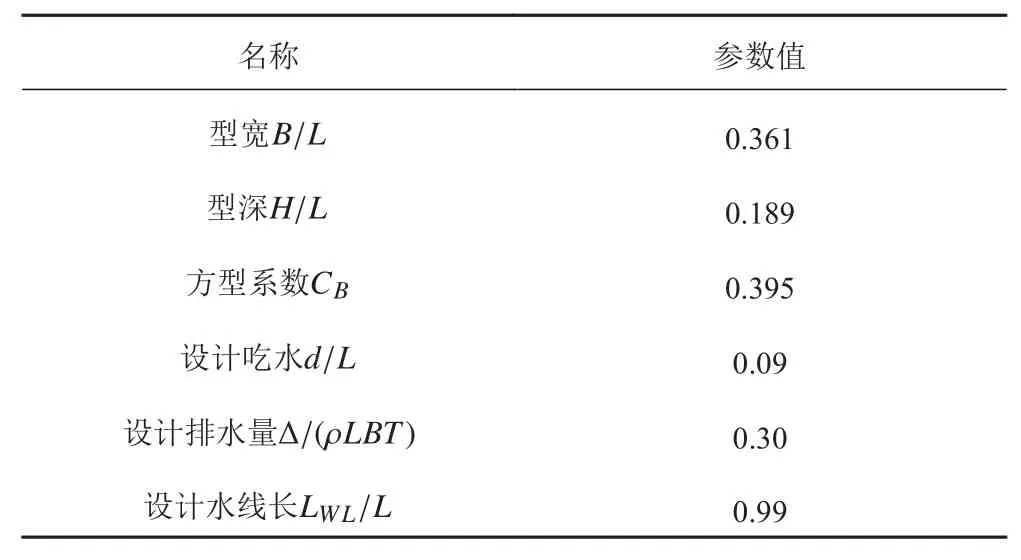
表 1 船模无量纲化主要参数Tab. 1Main dimensionless parameter of model
为获得和改善该艇的水动力性能,在中国特种飞行器研究所高速拖曳水池进行了静水拖曳试验。试验水池长510 m,宽 6.5 m,水深5 m,拖车速度最高可达22 m/s。阻力的测量采用BLR-1型拉力传感器,量程为0~40 kg,精度为0.2%。纵倾测量采用倾角传感器,精度为0.1°。升沉采用拉线式方法测量,误差小于1%。为了保证船模在高速拖曳过程中的强度,船模使用木质结构经打磨、喷漆、防漏等一系列加工而成。试验中加装了2种不同尺寸的阻流板,s取值折角线宽0.11,d取值1 mm,3 mm两个尺寸,试验模型如图2所示。
1.2 试验方案
对模型的初始状态调整后,进行从低速到高速的拖曳试验。拖曳过程中监测滑行艇的阻力、倾角、升沉,观察鸡尾流和飞溅,发生运动失稳则停止试验,调整阻流板深度,继续下一工况。滑行艇的阻力与速度采用无量纲化处理:单位升阻比,为滑行艇阻力,为模型排水量,体积弗劳德数的计算公式如下:
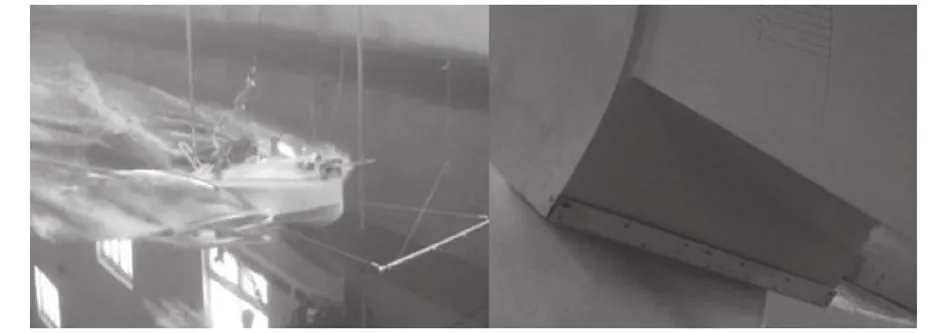
图 2 试验模型及阻流板安装Fig. 2Model of test and installation of interceptor

1.3 试验结果与分析
图3给出了模型光体以及加装阻流板1 mm,3 mm工况下的阻力、倾角以及升沉随航速的变化曲线。由图3(a)可以看出,加装阻流板可以显著降低<5.5之前的单位升阻比,普遍降幅达到20%,阻力峰相对于中高速段的差值也明显减小。在>5.5之后,阻流板的降阻效果消失,略微超出无阻流板工况下的单位升阻比。试验中发现阻流板3 mm与1 mm对于阻力的影响效果差别不大,没有继续进行阻流板3 mm状态下的高速工况。
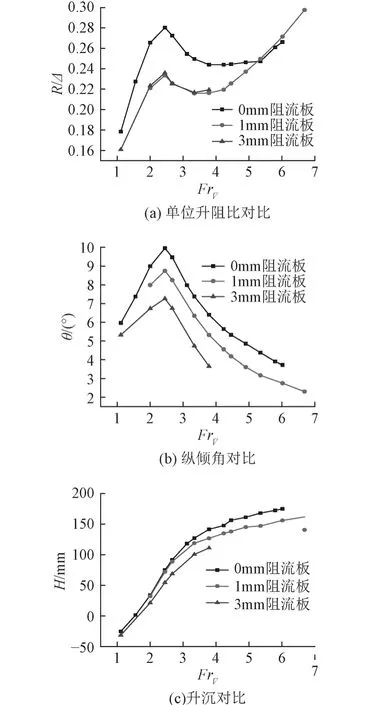
图 3 不同阻流板深度下的试验结果对比Fig. 3Comparison of test result at different depth of interceptor
滑行艇航行过程中纵倾角的变化直接影响滑行艇的阻力性能与纵向运动稳定性,是反映其性能的关键参数。纵倾角越大,船体越容易出现海豚运动,并且在不同的体积弗劳德数下,存在着最优航行攻角,对应的阻力性能最好[9]。由图3(b)可以看出,阻流板可以显著降低航行过程中的纵倾角,在中高速时效果更加明显,阻流板作用深度越大,纵倾角降低幅度越大。另外加装阻流板后模型的速度上限由=6提高到=7说明阻流板使得纵倾角减小,纵向运动稳定性提高。由图3(c)可以看出,阻流板作用深度越大,升沉值越小。升沉值会影响模型航行过程中的湿表面积,升沉值越大,湿表面积越小,对应的摩擦阻力也越小。结合阻力的变化规律,倾角更能直观的反映出阻流板对滑行艇的影响效果,并起主要作用。
2 数值分析
近年来随着CFD技术的发展,针对滑行艇水动力性能的研究越来越多地采用数值计算方法开展[10-12]。利用CFD软件不仅可以预报滑行艇的性能,还可以对试验中不易监测的要素进行量化和观察,便于深入分析。本文基于Star-CCM+软件平台开展滑行艇静水拖航及阻流板作用的数值仿真。
2.1 计算域与网格设置
根据流场关于船体中纵剖面的对称性,仅对一半流场进行网格离散。考虑到滑行艇在运动过程中剧烈的姿态变化,利用重叠网格技术将整个计算域划分为重叠域与背景域,背景域在计算过程中保持静止,重叠域与船体固连,在背景域中发生运动。采用切割体网格对计算域进行离散,两域之间设置重叠网格交界面,用于流场信息的传递。的长方体构型,其中入口距船首1.5L,
重叠区域采用略大于船模尺度的长方体构型,船模表面设置为无滑移不可穿透壁面,中纵剖面设置为对称面,其余边界设置为重叠网格边界。背景域采用上表面距甲板1L,下表面距艇底2L,均设置为速度入口;出口距船尾3.5L,设置为压力出口;侧面距中纵剖面3.5L,与中纵剖面均设置为对称面。
为精确捕捉流场细节,提高计算结果的精度对船体附近自由液面等流场变化剧烈的区域进行网格加密。船体表面网格尺度为,边界层层数7层,总厚度为8 mm,增长率取1.4,保证壁面无量纲+值在30~300之间。自由液面垂向加密网格尺度为1 mm,对重叠域与背景域的重叠边界进行适当加密,保证重叠域运动过程中数据传递的稳定性。重叠域网格数量120万,背景域网格数量40万。计算域与网格划分如图4所示。
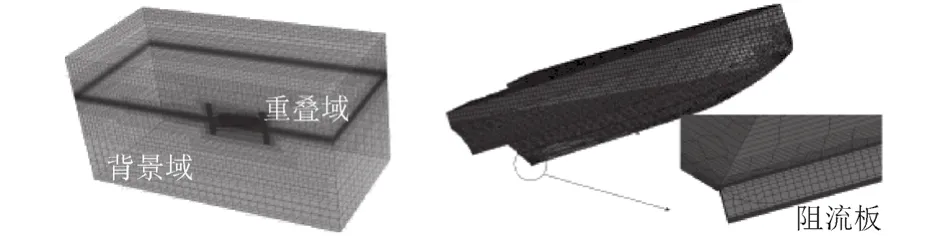
图 4 计算域与网格划分Fig. 4Computational domain and mesh sketch map
计算中选用隐式非定常模式和欧拉多项流,利用VOF方法处理船体运动时兴波自由面重构等强非线性现象,湍流模式采用SST模式,压力-速度的耦合求解采用PISO算法。同时在DFBI中,释放船模沿方向的平动以及绕轴的转动2个自由度。非稳态时间离散采用1阶格式,时间步长s。为保证计算收敛,在计算的初始阶段固定模型,使得模型在接近稳定的流场中进行姿态的调整。同时在释放模型后的一定时间内对模型运动幅度进行限制,使船体和重叠域边界的初始运动幅值在很小的范围内变化,保证计算的稳定性。
2.2 数值有效性验证
为验证计算方法的有效性,根据试验内容,计算滑行艇光体以及加装阻流板时不同航速下的单位升阻比和纵倾角。表2和表3给出了光体及阻流板3 mm工况下的计算结果和试验值及其误差。可以看出该数值方法计算所得的单位升阻比和倾角与试验值吻合较好,中低速工况下,升阻比最大误差不超过5%,整体误差均小于10%,满足工程应用的要求。误差产生的原因主要是所采用的网格尺寸对滑行艇的喷溅捕捉精度有限以及阻流板作用尺度相对于船体尺度是一个极小量,计算误差较大。

表 2 阻力计算值与试验值对比Tab. 2Comparison of resistance between calculations and experiments
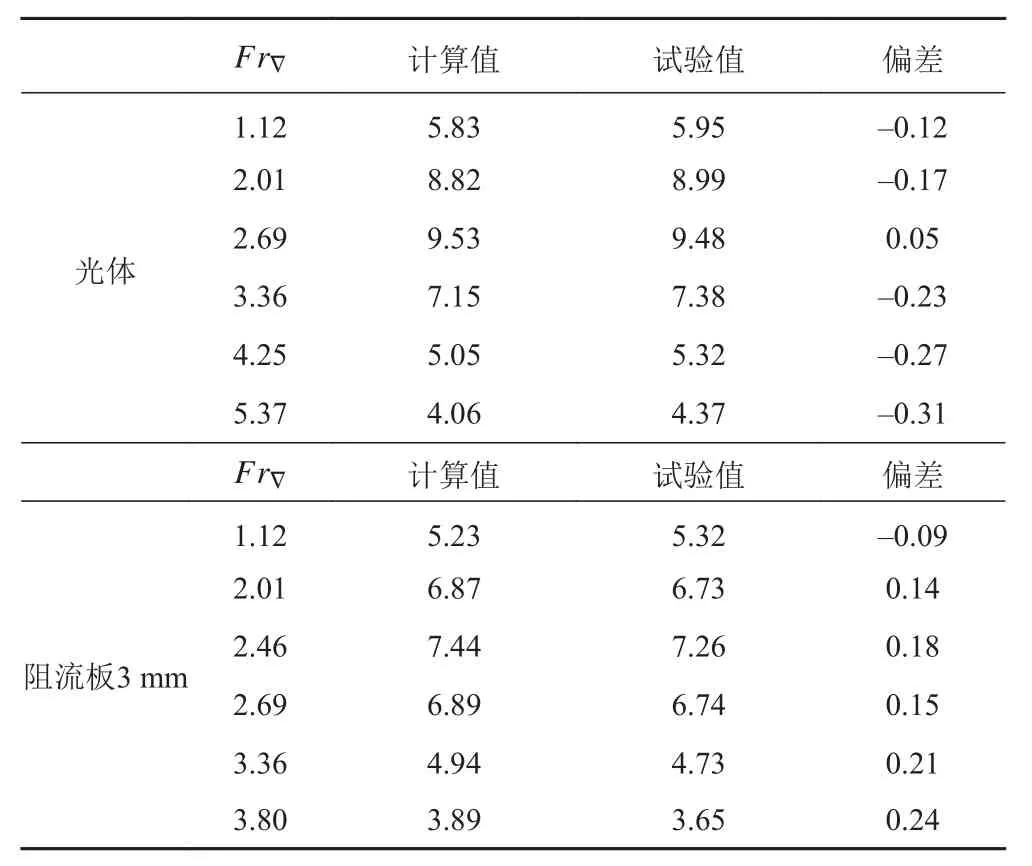
表 3 纵倾角计算值与试验值对比Tab. 3Comparison of trim between calculations and experiments
2.3 阻流板水动力特性
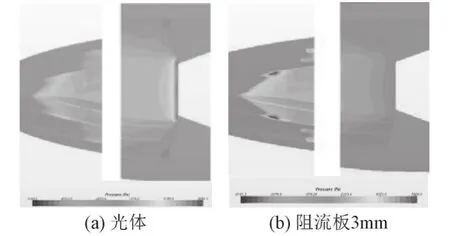
图 5 艇底压力云图Fig. 5Comparison of pressure distribution of bottom
3 结 语
1)合适长度的阻流板可以一定程度上改善滑行艇性能,显著降低中高速静水阻力和提高滑行艇的海豚运动临界速度点。
2)基于Star-CCM+软件可有效预报滑行艇以及加装阻流板的静水阻力性能,仿真结果与试验值吻合良好。
3)阻流板通过改变艇底压力分布减小滑行艇的航行纵倾角从而改善静水阻力性能和提高纵向运动稳定性。
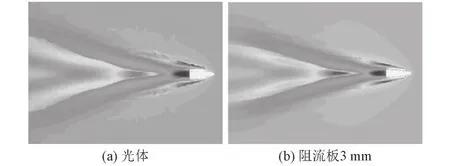
图 6 兴波云图Fig. 6Comparison of wave pattern contour
