DC-AC逆变器分数阶与整数阶PID控制对比
2020-04-18龙存林申耀华王允建
龙存林,申耀华,王允建
(1.青海省药品检验检测院 青海省中藏药现代化研究重点实验室,青海 西宁 810000;2.河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引言
分布式并网发电系统可实现大容量冗余供电,被公认为当今逆变技术发展的重要方向之一。作为分布式发电系统的能量通道,并网逆变器并网运行造成的电能质量问题,如稳态电压波动、谐波污染等问题必须受到严格控制[1~3]。因此,高性能的逆变器必须满足稳定性高、动态响应速度快以及鲁棒性好等要求。
并网逆变器的控制技术决定输出电能质量。并网逆变器控制可分为间接电流控制和直接电流控制[4]。由于间接电流控制存在动态响应慢,鲁棒性差等缺点,实际并网逆变器多采用直接电流控制的方法。学术界提出和发展了多种直接电流控制方法,如基于PID的控制[5],滞环电流控制[6],比例谐振控制[7]和重复控制[8]等。但是上述控制在稳定性、快速性和鲁棒性等方面仍存在不足。
分数阶PIλDμ控制具有稳定性高和动态响应速度快的特点,将分数阶控制器用来控制三相逆变器可以获得较好的控制性能。分数阶控制器主要分为四种[9],一是TID控制器。它是由分数阶环节和传统的整数阶微积分环节并联而成。其结构简单,调节方便,但控制效果不理想。二是Oustaloup提出的CRONE控制器[10,11]。其鲁棒性、控制性能较好。三是Podlubny提出的PIλDμ控制器[12]。四是超前滞后校正补偿器[13],其控制性能较为理想,但是需要系统的设计方法。文献[14]将分数阶PIλ控制应用于单相光伏并网逆变器中,取得了比整数阶PI控制更好的控制效果;文献[15]利用分数阶PIλ控制算法去改进预测函数控制,增强了逆变器输出的稳定性和鲁棒性;文献[16]提出了基于拉格朗日差值的分数阶重复控制理论并应用于单相逆变器。相比于传统PID,PIλDμ控制器在参数整定时比较复杂,但能够提高稳定性、鲁棒性等系统性能。
本文以工作于孤岛方式的三相逆变器为研究对象,设计了PIλDμ电流内环PIλDμ电压外环、PIλDμ电流内环PID电压外环、PID电流内环PIλDμ电压外环三种控制器。仿真研究所设计的三种双环分数阶PID与传统PID双环控制,结果表明,PIλDμ控制能够有效改善逆变器输出电压质量。
1 三相逆变器
1.1 系统拓扑结构及数学模型
本文采用的三相全桥逆变器的主电路拓扑结构如图1所示。图1中,Vdc为直流电压源输入电压,Ua0、Ub0、Uc0为逆变桥桥臂三相输出电压,iLa、iLb、iLc为三相滤波电感电流,iCa、iCb、iCc为三相滤波电容电流,Ua、Ub、Uc为逆变桥三相输出电压,Ra、Rb、Rc为逆变器三相阻性负载,ia、ib、ic为逆变器三相输出电流。系统的状态空间方程如式(1)所示。对式(1)进行Park变换可得dq旋转坐标系下的状态空间方程如式(2)、(3)所示。
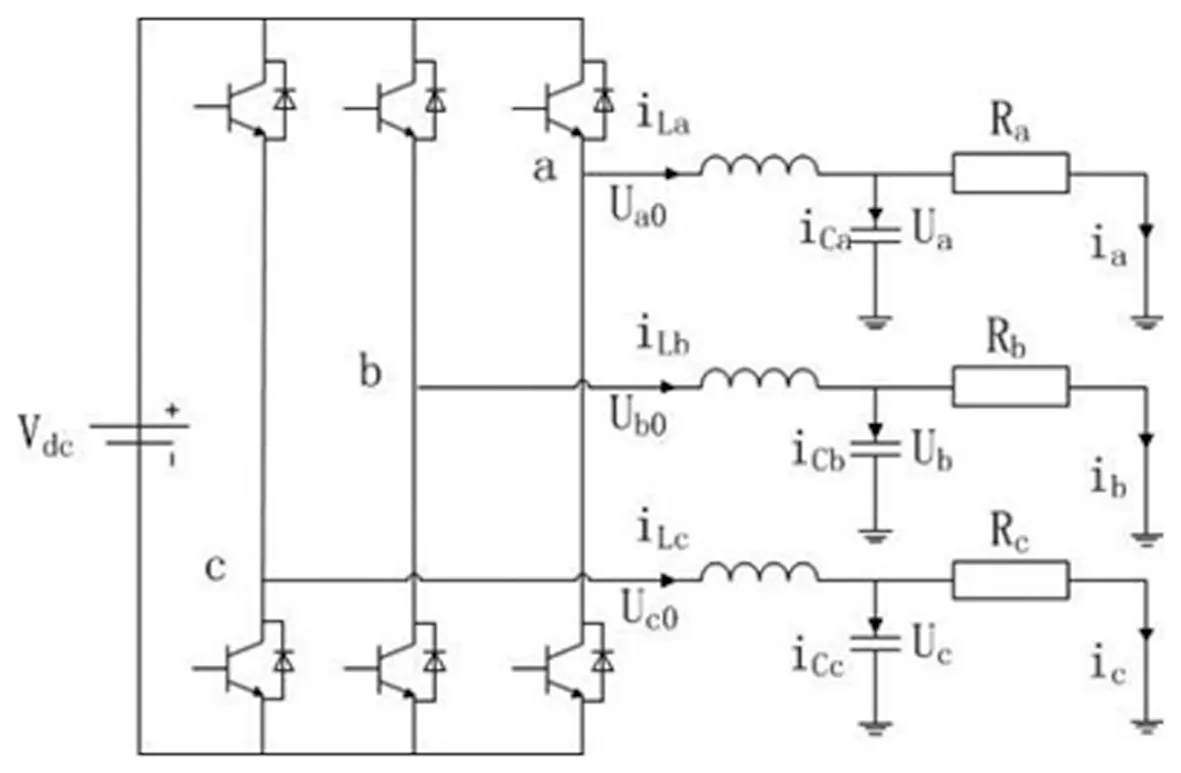
图1 三相全桥逆变器主电路拓扑图
(1)
(2)
(3)
本文采用单极性SVPWM调制方式,从控制电压小信号至占空比小信号的传递函数为:
(4)
其中,Vr为三角载波峰值,本文中取值为1。
从占空比小信号至逆变桥输出电压小信号的传递函数为:
(5)
联立(4)、(5)可知,从控制电压小信号至逆变桥输出电压小信号的传递函数为:
Kpwm=Vdc
(6)
三相逆变控制器的任务是保证逆变输出电压Ua、Ub、Uc的稳定和较低的谐波含有率及较好的动态响应速度。
1.2 双环控制原理
为了获得稳定的电压输出并提高系统的动态响应速度,三相全桥逆变器采用输出电压外环和滤波电容电流内环的双环控制策略。根据式(2)、式(3)可得电压外环控制律如式(7)所示,电流内环控制律如式(8)所示。其中,电压外环控制律包含了滤波电容电流解耦及负载电流前馈,电流内环控制律包含了滤波电感电压解耦及输出电压前馈。双环控制结构框图如图2所示。其中,PID1为电压外环控制器(后文中控制器下角标1为电压外环控制器),PID2为电流内环控制器(后文中控制器下角标2为电流内环控制器)。
(7)
(8)

图2 双环控制结构框图
2 分数阶PIλDμ控制器设计
2.1 三种分数阶双环控制器的控制律
为了提高逆变器输出的电能质量和鲁棒性,本文设计了三种分数阶双环控制器。其中,PIλDμ电流内环PIλDμ电压外环控制器的控制律如式(9)、(10)所示。
(9)
(10)
PIλDμ电流内环PID电压外环控制器的控制律如式(11)、(12)所示。
(11)
(12)
PID电流内环PIλDμ电压外环控制器的控制律如式(13)、(14)所示。
(13)
(14)
2.2 分数阶PIλDμ公式推导
根据GL定义可得分数阶微积分的离散形式如式(15)所示。当α>0时,为分数阶微分的离散形式;当α<0时,为分数阶积分的离散形式[17]。
(15)
分数阶PIλDμ控制器的时域表达式为:
农民用水协会的组建,既明确了末级渠系工程的管理责任主体,也有效保证了支斗渠维修资金的来源。《宁夏引黄灌区支斗渠水费管理办法(试行)》明确规定,引黄灌区支斗渠水费专项用于:管理人员工资、办公及业务费、支斗渠工程设施维修养护费等。协会每年利用30%的支斗渠水费,通过“一事一议”及时进行支斗渠维修、清淤,完全改变了以往末级渠系水利工程维修资金不落实、有人用、无人管的局面,真正实现了支斗渠维修管理的经常化、常态化和制度化,确保各类水利工程长期发挥效益。
(16)
根据式(15),对式(16)离散化,可得分数阶PIλDμ的表达式:

(17)

2.3 基于神经网络算法的参数自整定

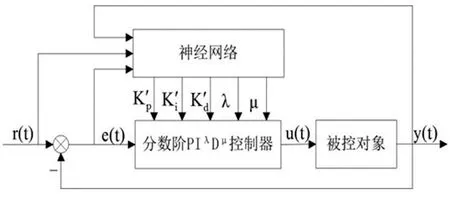
图3 BP神经网络分数阶PIλDμ控制器原理
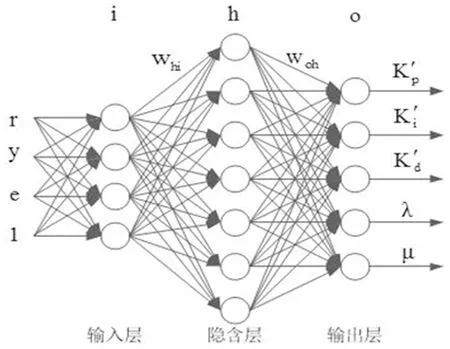
图4 BP神经网络结构图
定义代价函数为:
E(k)=e2(k)/2
(18)
网络输出层权值调整算法为:
Δwoh(k)=ηδ0(k)Hh+αΔwoh(k-1)
(19)
(20)
其中,η为学习因子,α为惯性系数,Hh为隐含层的输出。y′(net0)为神经元的功能函数对输出层的输入net0的导数。
Δwhi(k)=ηδh(k)Ih+αΔwhi(k-1)
(21)
(22)
其中,φ′(neth)为神经元的功能函数对隐含层的输入neth的导数。
根据公式(16)可得∂Δu(k)/∂O(k)为:
(23)
3 仿真研究
3.1 系统参数
为了考察三种分数阶PIλDμ控制的性能,并与传统的PID控制进行仿真对比,本文利用Matlab搭建了PID电流内环PID电压外环、PID电流内环PIλDμ电压外环、PIλDμ电流内环PID电压外环、PIλDμ电流内环PIλDμ电压外环四种控制器逆变系统仿真模型。系统参数为:直流电压Vdc=537.5V,滤波电感L=3.1mH,滤波电容C=32.6μF,纯阻性负载R=6.9Ω,在5s时刻突变到R=41.6Ω。逆变输出:频率f=50Hz,线电压有效值VL=380V;桥路开关频率fs=5kHz。神经网络的学习因子η=0.25,惯性系数α=0.05。由神经网络整定的双环控制器的参数如表1所示。

表1 BP神经网络整定的双环控制器参数
3.2 四种控制器的仿真对比分析
根据神经网络整定的参数进行仿真,系统的单位阶跃响应曲线如图5所示,图5内的子图为6ms~7ms的局部放大图。由图5可知,在6ms时三种分数阶PIλDμ控制系统都达到稳态,而PID控制系统还在爬升,即三种分数阶PIλDμ控制系统的响应速度要优于PID控制系统的响应速度。

图5 阶跃信号响应曲线
将控制器应用于系统,仿真运行10s,在5s时刻负载由R=6.9Ω突变到R=41.6Ω,其仿真曲线如图6所示。图6(a)为输出线电压每个正弦波周期的THD对比图,图内的两个子图为4.5~5s和9.5~10s的局部放大图。图6(b)为输出线电压每个正弦波周期的有效值对比图,图内的三个子图为0~0.5s、5~5.5s和9.5~10s的局部放大图。由图6可知,无论负载是否突变,分数阶PIλDμ控制系统输出线电压THD和稳定性都要优于PID控制系统。其中,PIλDμ电流内环PID电压外环控制系统输出线电压的快速性和稳定性最好,THD最低,0.02s时就能够输出有效值为380V±0.1V,THD为0.5%以内的线电压,负载突变后0.02s就能够输出有效值为380V±0.1V,THD低于0.6%的线电压。
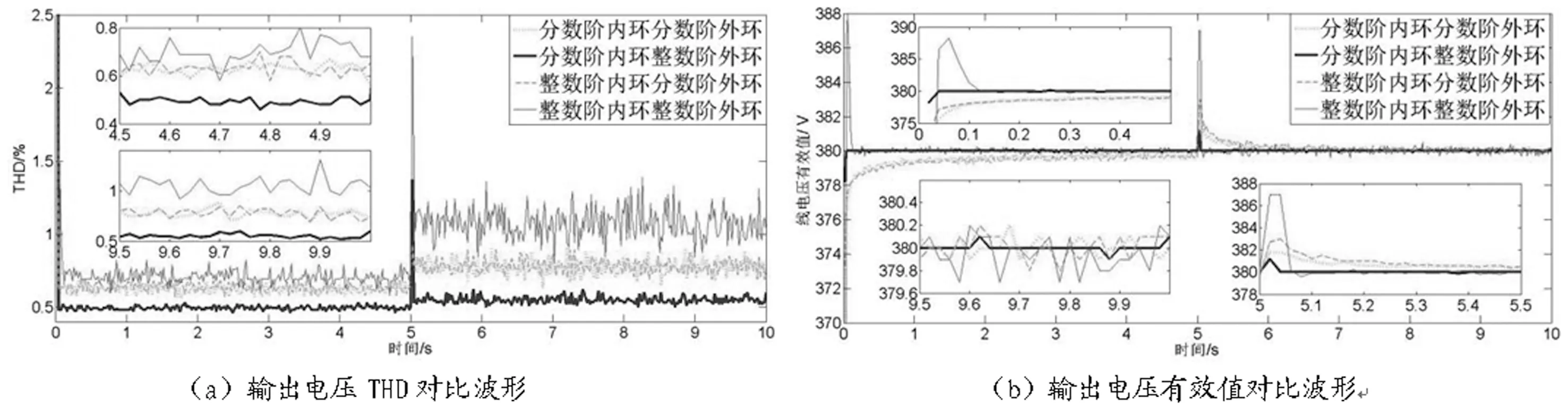
图6 阻性负载下四种逆变器THD及有效值对比
将按照纯阻性负载整定的控制器应用于感性负载和非线性负载。感性负载参数为:R=114.125Ω,L=0.24412H;非线性负载采用电阻、电感和二极管桥式整流电路串联的结构,其中,R=114.125Ω,L=0.24412H,直流负载为120Ω。图7所示为感性负载下四种逆变器输出线电压每个正弦波周期的THD和有效值对比图,图7(b)内的子图为4.5~5s的局部放大图。图8所示为非线性负载下四种逆变器输出线电压每个正弦波周期的THD和有效值对比图,图8(b)内的子图为4.5~5s的局部放大图。由图7、图8可知,应用于感性负载和非线性负载时,分数阶PIλDμ控制系统输出线电压的THD和稳定性仍然优于传统的整数阶PID控制系统。其中,PIλDμ电流内环PID电压外环控制系统输出电压的质量最好,谐波抑制能力最强。应用于感性负载,在0.02s就能输出380V±0.1V,THD低于0.7%的线电压。应用于非线性负载,在0.04s就能输出380V±0.1V,THD低于0.75%的线电压。

图7 感性负载下四种逆变器THD及有效值对比
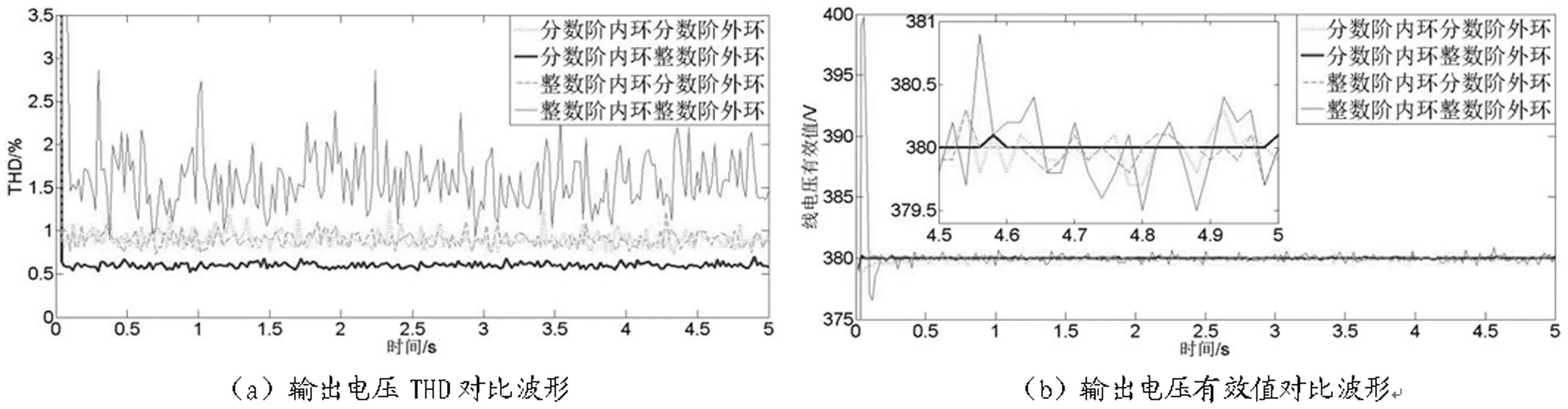
图8 非线性负载下四种逆变器THD及有效值对比
通过仿真对比可得,三相逆变器采用分数阶PIλDμ电流内环PID整数阶电压外环控制,无论是系统稳定性、响应速度、THD还是抗负载变化都是四种控制中最优的。
4 结论
为了提高三相逆变器输出电压质量,增强系统鲁棒性,本文提出了用分数阶PIλDμ双环控制代替传统的整数阶PID的双环控制方法,并将控制器应用于感性负载、非线性负载和突变的纯阻性负载。仿真研究了系统的控制性能,结果表明,相比于传统的整数阶PID双环控制器,采用分数阶PIλDμ的双环控制器能够有效提高逆变器输出电压质量和系统鲁棒性。其中,相比于分数阶PIλDμ电流内环分数阶PIλDμ电压外环控制系统和PID电流内环分数阶PIλDμ电压外环控制系统,PIλDμ电流内环PID电压外环控制系统输出电压质量最好,谐波抑制能力和鲁棒性最强。
