一种视觉传感器障碍物覆盖方法研究*
2020-04-18刁望成宋宇博
刁望成,宋宇博
一种视觉传感器障碍物覆盖方法研究*
刁望成,宋宇博
(兰州交通大学机电技术研究所,甘肃 兰州 730070)
为从视觉传感器覆盖角度提高自动驾驶车辆感知系统的感知效果,以视觉传感器探测区域内障碍物覆盖面积为量化评价指标,提出一种优化视觉传感器覆盖的方法。该方法在建立视觉传感器探测区域模型的基础上,引入不规则三角网描述障碍物表面特征,将视觉传感器探测区域覆盖面积计算问题转化为三角网格中三角形覆盖判定和三角形面积累加问题。以视觉传感器探测区域覆盖面积最大化为优化目标,构建一种面向三维覆盖的视觉传感器覆盖模型,并设计粒子群算法对模型进行求解,最后通过仿真验证该优化方法的有效性。
视觉传感器覆盖优化;三角网格;探测区域覆盖面积;粒子群算法
随着自动驾驶技术的不断普及,车辆环境感知功能越来越受到人们重视。车载摄像头具有成本低和识别功能等特点,被广泛应用到环境感知系统中。为保证自动驾驶车辆的行驶安全,需要保证车载视觉传感器具备较高的探测性能,高精度摄像头对成本和技术难度提出了一定要求,也不利于自动驾驶技术的推广。本文通过调整视觉传感器在车辆中的安装位置来增强对障碍物的探测效果。文献[1]提出了无线多媒体传感器三维覆盖模型,通过调整传感器自身位置和角度实现监测区域覆盖增强。文献[2]提出了限定传感器具体探测范围实现监测区域全覆盖算法。文献[3]提出了一种视觉传感器三维覆盖模型,通过覆盖不同建筑物和道路场景增强覆盖范围。
以上研究成果所建立的模型计算量相对复杂,且没对环境中具体出现的障碍物进行研究,不能作为实际场景下的方法推广。本文建立一种简化视觉传感器覆盖模型,针对车辆行驶过程中出现的车辆和行人等障碍物进行覆盖研究,建立视觉传感器和障碍物之间的关联关系,能够有效提高视觉传感器对障碍物的覆盖效果。
1 视觉传感器探测理论研究
本文研究的视觉传感器针对障碍物的覆盖增强,首先建立传感器的有向探测模型,使用探测距离和探测角度两个参数来建立模型,如图1所示。在相关文献基础上,该模型可用三元组(s,,)表示,其中s=(s,s,s)为视觉传感器在空间中的三维坐标,=(,)表示视觉传感器在水平方向上的偏移角度和垂直方向上的偏移角度,=(,)为视觉传感器主感知方向,为视觉传感器在水平和垂直方向上的探测角度,为视觉传感器的探测距离。

图1 视觉传感器探测模型
2 探测对象模型研究
2.1 点云网格化处理
本文采用点云数据表示障碍物,通过点云数据生成的障碍物表面三角网格模拟障碍物表面。计算视觉传感器不同的三维坐标和偏移角度下视觉传感器自身位置参数。行人和车辆是最为常见的障碍物,采用三角网生长法将点云数据生成表面三角形网格,以三角形网格每个三角形为基本单元,对障碍物进行模型建立[4],相关内容如下所示。
最接近:以最近的三点形成三角形,且各线段(三角形的边)皆不相交。
唯一性:不论从区域何处开始构建,最终都将得到一致的结果。
2.2 探测对象模型分析
通过运用三角网生长法对障碍物点云数据进行计算,获得探测对象三角网格模型。该探测对象模型在一般情况下,表面网格中的每个三角形周围有3个三角形相连,三角形的每个顶点与其余三角形的6个顶点相连,在表面凹凸不平的情况下会有不同特征。本文选用汽车障碍物作为探测对象进行研究,其离散化模型如图2所示。
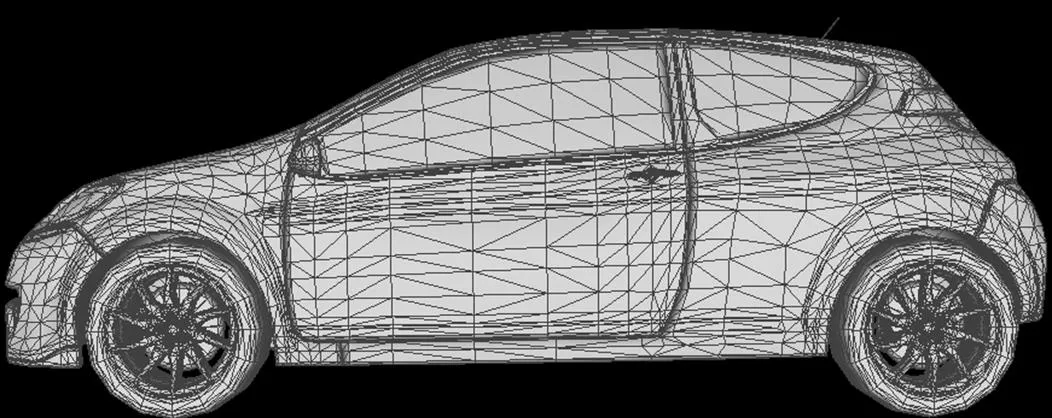
图2 探测对象模型
为了更方便计算探测对象表面被视觉传感器覆盖的面积,以每个三角形中心点k表示探测对象表面中每个对应三角形,通过判断k是否被视觉传感器覆盖来确定相应的三角形是否被覆盖,将探测对象模型表面覆盖面积的计算问题转化为三角形中心点的覆盖判定和三角形面积累加计算的问题。中心点k由空间中的三维坐标和三角网格面的法向量表示。k=(k,k,k,,),其中(k,k,k)为三角网格中心点三维坐标,(,)为三角形网格面法向量。
2.3 覆盖方法
视觉传感器三维坐标与探测对象三角网格中心点在一个坐标系下进行研究。中心点如果被视觉传感器覆盖,需要满足如下两个条件:①中心点需要出现在视觉传感器的探测距离内,还需要出现在视觉传感器探测角度内,具体判断方法为,计算目标点法向量与视觉传感器主感知方向法向量之间夹角,所得夹角应小于视觉传感器探测角度;②计算中心点与视觉传感器三维坐标距离和视觉传感器探测距离大小,所得距离应小于视觉传感器探测距离。
3 视觉传感器覆盖优化
3.1 视觉传感器覆盖优化模型
在障碍物离散化模型和视觉传感器探测模型的基础上,以视觉传感器的探测区域内所覆盖的三角形总面积之和作为量化评价的指标。视觉传感器的三维坐标和偏移角度为优化变量,建立的视觉传感器覆盖优化模型为:

式(1)中:为三角形总数;k为符合覆盖条件的三角形二进制变量,被覆盖为1,否则为0。目标函数值越大,表示视觉传感器覆盖效果越好。
3.2 采用粒子群算法构建搜索领域
视觉传感器覆盖优化模型的求解需要确定每个视觉传感器的三维坐标和偏移角度,其中三维坐标包括3个优化变量,偏移角度包括2个优化变量。
本文采用粒子群算法,针对覆盖模型中三维坐标和偏移角度的约束条件构建搜索领域,具体算法设计如下:①设置粒子数量为,在视觉传感器可以安装的范围内初始化粒子的位置和速度;②比较每个粒子的覆盖面积,选择适应度最大的粒子位置作为当前最优解;③循环第代,由粒子群算法迭代更新粒子速度和位置,迭代产生每个粒子新的位置,计算其对应的覆盖面积,分别与当前粒子最大覆盖面积进行比较,更新粒子最好位置;④比较每个粒子的覆盖面积和种群所经历的最好位置覆盖面积,选择当前全局最大覆盖面积粒子位置作为+1代全局最佳位置;⑤判断是否等于最大代数,没有则执行步骤③,若满足则输出粒子最大覆盖面积和粒子最好位置。
3.3 仿真计算分析
为验证视觉传感器覆盖效果增强,仿真实验设置在长度50 m,宽度10 m的场景中,障碍物位于智能车中心点的正前方35 m,障碍物设置为2辆小汽车,位于智能车正前方。视觉传感器数量为2,探测距离为60 m,探测角度为20°。根据智能车实际能放置视觉传感器的位置设置约束条件,如表1所示。
表1 视觉传感器参数设置
传感器x坐标/cmz坐标/cm水平偏移角/rad垂直偏移角/rad 视觉传感器1[-75,0][70,120][1.05,2.09][1.05,2.09] 视觉传感器2[-75,0][70,120][1.05,2.09][1.05,2.09]
仿真实验结果,2台视觉传感器总覆盖面积之和如图3所示,视觉传感器自身位置不同,参数在粒子群算法优化前后所对应的总覆盖面积如表2所示。
4 结论
由图3可知,视觉传感器感知区域的覆盖面积之和随着迭代代数的增加不断增加,最后粒子群算法达到收敛,得到总覆盖面积的最大值。由表格数据可知,每个视觉传感器覆盖面积均有所增加,其覆盖效果有所增强,同时得到每个传感器的三维坐标和偏移角度。该方法会因障碍物形状不同差生不同结果,但是对实际自动驾驶车辆如何安装视觉传感器也有一定理论价值,对实际工程问题具有一定指导作用。
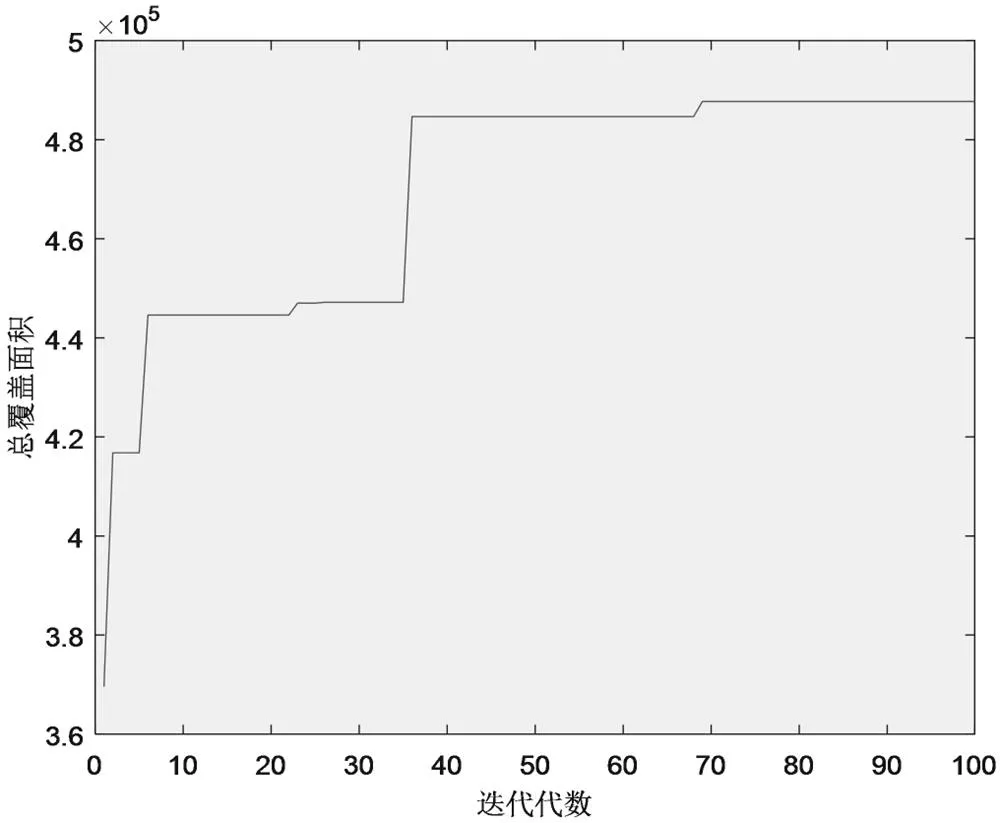
图3 总覆盖面积迭代图
表2 视觉传感器覆盖面积
优化前x坐标/cmz坐标/cm水平偏移角/rad垂直偏移角/rad覆盖面积/cm2 视觉传感器1-161131.711.58122 283.53 视觉传感器2261121.621.66212 822.07 优化后x坐标/cmz坐标/cm水平偏移角/rad垂直偏移角/rad覆盖面积/cm2 视觉传感器1-56.87106.741.481.54244 078.61 视觉传感器231.0891.071.511.55243 635.96
[1]肖甫,王汝传,孙力娟,等.一种面向三维感知的无线多媒体传感器网络覆盖增强算法[J].电子学报,2012,40(1):167-172.
[2]王艳娇,毕晓君,滕志军,等.三维无线多媒体传感器网络全目标覆盖算法[J].吉林大学学报(工学版),2015,45(5):1671-1679.
[3]高飞.视频传感器网络多目标多要素三维覆盖优化调度方法[D].南京:南京师范大学,2018.
[4]黄浩洋,邓飞,隆振海,等.二维离散点集Delaunay三角网生长算法的改进[J].电脑知识与技术,2016,12(23):188-191.
2095-6835(2020)06-0083-02
U495
A
10.15913/j.cnki.kjycx.2020.06.030
刁望成(1993—),男,山东菏泽人,在读硕士研究生,研究方向为自动驾驶环境感知传感器布局优化。
宋宇博。
甘肃省高等学校科学研究项目(编号:2018C-10)
〔编辑:严丽琴〕
