使用机器人进行货架补货的 操作规划和控制
2020-04-16编辑部编译
编辑部编译


机器人在物流领域的应用正在迅速增加。由于物品在尺寸、形状、重量和易碎性方面存在很大的差异,并且物品的放置任务都有特定的约束条件,使用机器人自动化地完成这些任务仍是一项挑战。操作规划和控制是机器人系统的相关组成部分。以REFILLS项目为背景,Marco Costanzo、Simon Stelter、Ciro Natale、Salvatore Pirozzi、Georg Bartels、Alexis Maldonado、Michael Beetz等几位研究人员对使用机器人进行超市内货架补货的问题进行了研究。这项研究也得到了欧盟委员会的支持。
操作规划和控制是机器人系统的相关组成部分。它们的紧密集成是提高机器人自动化的关键因素,并使机器人能够执行越来越复杂的操作任务,例如店内物流领域所需的那些操作任务。在超市中需要将各种各样的物品放置在货架上,而这些放置任务都有特定的约束条件。因此,使用机器人完成这些任务是一项挑战,机器人需要很高的灵活性。然而,反应性抓取控制和运动规划的集成,可以使机器人即使在使用灵活性有限的夹持器的情况下,也能够执行此类任务。本文的主要贡献在于提出了一种新的方法——使用提供了更多控制形式(即避免滑倒和控制滑动)的反应性控制层来规划操作任务的执行。使用配备了移动机械臂夹持器的新型力/触觉传感器的实验表明,该方法使机器人能够成功地执行标准固定抓取无法实现的操作任务。
引言
机器人在物流领域的应用正在迅速增加,但目前大多仅限于物流中心,例如,Kiva移动机器人的使用提高了包装过程的效率。然而,产品装箱很难实现自动化,这主要是由于箱子中的物品在尺寸、形状、重量和易碎性方面存在很大差异。实际上,移动操作解决方案在市场上很少见。亚马逊发起了著名的亚马逊拾取挑战赛(Amazon Picking Challenge,APC)[1],很多研究人員从中对抓取已知和未知物体产生了新的见解,例如Zeng等人在2018年IEEE机器人与自动化国际会议(International Conference on Robotics and Automation)上所提出的“利用多功能抓取和跨域图像匹配,实现机器人在复杂环境下新物品的拾取与放置”。正如在关于第一届APC的综述论文(Correll等人于2018年)中所详细讨论的那样,在“机器人有朝一日能够有助于提升效率和吞吐量,同时降低成本”之前,还有许多挑战有待解决。
本文以REFILLS项目[2]为背景,对超市内货架的补货问题进行了研究。除了在APC中看到的那些挑战之外,这个场景还提出了新的挑战。机器人将需要一个大量的技能集来执行获取和放置任务,因为它们必须在狭小的空间中操作并处理各种物体。这个技能集必须包括在控制中的操作(in-hand manipulation),以至少避免耗时的重新抓取。图1给出了一个示例。假设机器人必须在桌子中央拾取红色物体,并将其放置在中间的架子层中,以实现图中右侧的目标姿态。显然,具有夹持器姿势的固定抓取无法实现,并且无法避免拾取和放置姿势的碰撞。在标准的规划过程(Chitta、Sucan和Cousins于2012年提出)中,只有在缓冲托盘上执行重新抓取的动作才能使机器人执行任务。然而,通过在保持物体固定的情况下旋转夹持器来执行物体受控制的旋转滑动(即所谓的夹持器绕轴旋转),规划器具备更大的搜索空间,并且可能会找到可行的路径。
最近有两篇关于在控制中的操作的论文。第一篇论文通过利用微分平坦(differential flatness)概念和反馈线性化(feedback linearization)技术解决平面推动问题。第二篇论文涉及到同样的应用,但重点是基于运动锥(motion cone)的概念规划推动轨迹。然而,根据定义,开环的方法不会对感知反馈做出反应。在不确定的环境中,需要基于传感器的控制来稳健地执行规划。在过去,我们一直在研究一种控制器,该控制器可以进行参数设置,以在避免所持物体滑动和控制所持物体旋转滑移之间进行切换(Costanzo、Maria和Natale于2018年提出)。根据众所周知的外部灵活性(Dafle等人于2014年提出)的概念,提高机器人灵活性是通过对抓取的智能控制来实现的,而不是通过使用额外的自由度。它被证明可以足够可靠地处理各种各样的物体。
然而,这仅仅是机器人将需要的上述技能之一。要以更高的自动化程度使用这种新潜力,必须将其与具有利用潜力的运动规划器相结合。
在REFILLS项目中,最终需要一个基于知识和规划的控制架构,即,受Beetz等人于2012年所发表的论文的启发,从一个规划库中有能力地选择和执行规划。Winkler等人(于2016年)已经成功地证明,基于知识和规划的控制范式非常适合零售环境中的机器人货架补充任务。
本文的主要贡献在于,提出了一种实现底层反应性控制层与运动规划器紧密集成的方法,该运动规划器是REFILLS架构的组成部分。其重点是货架补给任务的取出和放置阶段,在此阶段,必须安全地处理各种各样的物体,即,以特定的姿势(可能与抓取姿势不同)将其取出并放在架子上,同时避免物体滑倒。该方法依赖于一种通过抓取控制器在控制中的操作能力来提供给运动规划器的能力,改变机器人的运动学模型,以扩大搜索空间,从而使其更有可能找到解决方案。
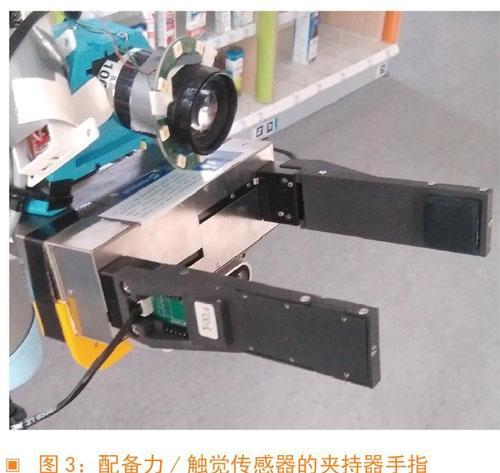
除此之外,我们还提供了一个力/触觉传感器(Costanzo等人于2019年提出)的改进版本,该传感器与反应性控制算法配合使用。该传感器已经集成到一个商业夹持器的手指上,并且其尺寸适合进入货架上物体之间的狭窄空间。其PCB(Printed Circuit Board,印制电路板)设计已经得到改进,以通过LED的电流馈电来提高信噪比,使用模拟缓冲器将电压信号连接到模数转换器(Analog-to-Digital Converter)以及微型控制器与通信接口的几种可能性在板上的集成。
实验将展示货架补给所必需的操纵任务,尽管在固定抓取的情况下不可行,但通过使用对滑动的控制所提供的额外灵活性如何变得可行。实验在一个移动机械臂上进行(如图2所示)。该机械臂配备了一个带有力/触觉传感器的夹持器(如图3所示,但本文中未使用相机)。图4所示的5个物体被用于实验。
传感装置
这项研究中所使用的感应手指是基于De Maria、Natale和Pirozzi(于2012年)的论文中所最初提出的技术。发达的触觉传感器主要由三部分组成:印制电路板(PCB)、剛性网格(rigid grid)和可变形垫(deformable pad)。 Costanzo等人(于2019年)对这些触觉传感器进行了初步设计。其与本文所用版本的主要区别在于印制电路板(PCB)的设计。
PCB设计:本研究设计了一个不同版本的PCB来改善以下几个方面。PCB上的每个感应点(称为taxel)都由New Japan Radio (代码NJL5908AR)制造的光反射器(photo-reflector)构成。该PCB集成了25个以5×5矩阵排列的taxel,空间分辨率为3.55毫米。在先前版本中,光反射器的LED是由电压电源和串联电阻驱动的。而在这种情况下,LED由可调电流源(制造商代码LM334)驱动,通过降低其温度漂移(temperature drift)来提高反射光的稳定性。此外,为了提高信噪比并简化查询固件,也进行了进一步的改进。
该解决方案能够避免使用额外的SPI接口,从而获得具有可编程设备的完整集成的传感器,可用于通过不同接口采集传感器数据。在本文中,已通过USB到串行商业电缆开发了一个标准串行接口。所有传感器数据的最终采样频率为500Hz。图5展示了重新设计和组装的PCB。
刚性网格:本研究对网格框架略加修改,使其机械部分与PCB和taxel完美匹配,而无需使用先前版本中所使用的刚性销钉(rigid pin)。因此,该网格是用氰基丙烯酸酯基胶水粘在PCB上的。
可变形垫:它的作用是将施加的力转化为可被taxel检测到的变形。它已经实现了Costanzo等人(于2019年)发表的论文中详细说明的一致的尺寸、材料和成型程序。
组装好的力/触觉传感器被固定在一个盒子内,该盒子是用于放置传感器的,并安装在WSG系列凸缘上。
实施和架构
在本节中,我们展示集成系统的架构(如图6所示)。任务执行器将目标发送给运动规划器,这些目标是完成任务(例如补充货架)所需要的。该模块能够访问知识库并设置摩擦系数?, ?是物体滑动控制器的具体参数。
该运动规划器生成关节空间(joint space)轨迹,以实现给定的目标,同时利用机器人的能力将被抓取的物体进行绕轴旋转。
控制模式切换模块在将轨迹发送给机器人之前对其进行后处理(post-process)。在执行轨迹时,模块向滑动控制器发送命令,在两种控制方式之间进行切换。
我们详细介绍了滑动控制器、对运动规划器的更改,以及控制模式切换。我们省略了任务执行器,因为它在我们的实验中是运动目标的一个简单序列。
实验评估
本节描述了用图4中的物体所进行的实验评估,描述了三组实验。第一组评估物体在绕轴旋转过程中的角度;第二组评估有和没有绕轴旋转的情况下进行简单拾取和放置任务的可行性;第三组是一个配备不同物体和障碍的完整的拾取和放置实验。
结论
本文展示了抓取控制与运动规划器的紧密集成如何使移动机械臂在现实的物流场景中解决复杂的操作任务。该规划算法利用底层滑动控制层提供的在控制中的操作能力来解决有限空间中的取出和放置任务。这是通过在两种不同的抓取控制模式(避免滑倒和夹持器绕轴旋转)之间的一种新颖的切换方法来实现的。夹持器绕轴旋转使机器人能够改变抓取配置,而无需重新抓取物体,这有效地增加了自由度。滑动控制器需要一个物体的具体摩擦参数才能工作,该参数目前是预先估计好的并保存在知识库中。
未来,我们计划将其集成到为REFILLS项目而提出的基于知识和规划的控制架构中,用于自动补充超市货架。另外,我们希望通过对未知物体的触觉探测来自主地估计物体的具体摩擦参数。
参考文献
[1] “Amazon picking challenge,” http://amazonpickingchallenge.org/ how-much-has-amazon-invested-in-automation/, accessed: 2019-08-31.
[2] “Refills project,” http://www.refills-project.eu, accessed: 2019-09-01.