汽车EPS系统中声表面波扭矩传感器的天线设计
2020-04-16赵青青孟旭王春风
赵青青 孟旭 王春风

摘 要: EPS系统是智能驾驶汽车不可或缺的组成环节,也是车身上安全级别最高的模块之一,本文为了简化EPS系统工作中实时动态扭矩测量系统的硬件组成,提高扭矩测量精度,降低响应时间,提出一种利用微带天线作为信号传输天线的无源无线式声表面波EPS扭矩测量系统。本文利用HFSS 15.0软件对同轴底面馈电式微带矩形天线结构进行三维建模、仿真优化,求解天线的最优结构尺寸,加工实物天线并搭建电动助力转向系统扭矩测试试验台。研究结果表明,所设计的天线能够满足车辆转向时的动态扭矩测量信号传递需求,便于布置,节省安装空间,可以实现无线传输扭矩信号。本文研究内容可以为智能驾驶汽车的其余动态性能参数测量提供参考。
关键词: EPS;声表面波;无源无线;扭矩测量;微带天线
中图分类号 :U463.4;TP212 文献标识码 :A 文章编号 :1006-8023(2020)02-0062-05
Antenna Design of SAW Torque Sensor in EPS System
ZHAO Qingqing1, MENG Xu2*, WANG Chunfeng1
(1. Department of Mechanical and Electrical Engineering, East University of Heilongjiang, Harbin150066, China; 2. School of Traffic Transportation, Northeast Forestry University, Harbin 150040, China)
Abstract: EPS system is an indispensable component of intelligent driving vehicles and one of the modules with the highest safety level. In order to simplify the EPS system works in real-time dynamic torque measurement system hardware composition, increase torque measuring precision, reduce response time, this paper proposes a passive wireless type surface acoustic wave EPS torque measurement system using a microstrip antenna as a signal transmission antenna. HFSS 15.0 software is used to conduct 3 d modeling and simulation optimization for the structure of coaxial underplane fed microstrip rectangular antenna, solve the optimal structure size of the antenna, process the real antenna and build the torque test bench for the electric power steering system. The test results show that the SAW torque measurement system designed in this paper can meet the requirements of dynamic torque measurement when the vehicle is turning, which is easy to arrange, saves installation space and can transmit torque signal wirelessly. The research content of this paper can provide reference for the measurement of other dynamic performance parameters of intelligent driving vehicles.
Keywords: EPS; SAW; passive wireless; torque measurement; microstrip antenna
收稿日期: 2019-09-30
基金項目: 国家自然科学基金(51575097);黑龙江东方学院横向课题(HDFHX180110)
第一作者简介: 赵青青,硕士,讲师。研究方向:新能源汽车电子控制。E-mail:837858480@qq.com
*通信作者: 孟旭,硕士,讲师。研究方向:声表面波扭矩测量技术。E-mali:372933190@qq.com
引文格式: 赵青青,孟旭,王春风.汽车EPS系统中声表面波扭矩传感器的天线设计[J].森林工程,2020,36(2):62-66.
ZHAO Q Q, MENG X, WANG C F. Antenna design of SAW torque sensor in EPS system[J]. Forest Engineering,2020,36(2):62-66.
0 引言
电动助力转向(EPS)系统是智能驾驶汽车不可或缺的重要辅助单元[1]。搭载有EPS系统的车辆每百公里可以减少0.4~0.6 L的燃油消耗量以及0.8~1 kg的CO2排放量。车辆在行驶过程中不可避免地会遇到泥泞、沙石和柏油等不同路面情况和起步、加速和减速等不同工况,这些复杂的行驶状况对EPS系统在采集车辆转向扭矩信号方面提出了苛刻的要求,既要求EPS系统在采集扭矩信号时的实时性与准确性,又要求扭矩测量系统可靠性要高,具有适应大范围温度变化及抗污染、抗电磁干扰等能力。
现代检测扭矩的方法可划分为磁弹性式、应变式、振弦式、光电式、磁电式、电容式、光纤式、磁敏式、激光多普勒式、软测量式和激光衍射式等多种扭矩测量方法。这些方法都各有优势,但同时也都存在着一些缺陷[2-10]。英国Sensor Technology公司的A.Lonsdale在1997年最先提出用声表面波(SAW)元件测量旋转轴扭矩的方法,并分析了该项技术的优势[11]。从中可以发现SAW扭矩测量技术不仅具有无源无线的优势,更对大范围温度场、电磁干扰和污染等恶劣情况有着极强的天然抗性。
1 声表面波扭矩测量原理
SAW扭矩测量方法是利用粘贴于转轴上的声表面波谐振器(SAWR)在扭矩发生时,其谐振中心频率的变化量与扭矩的变化量成线性关系这一特点来实现扭矩测量的。典型的单端对SAWR结构如图1所示。其具体工作原理是当天线接收到的激励信号被叉指换能器(IDT)转换成SAW沿基底表面向两侧传播,经过反射栅加强与反射后在基底表面形成驻波,该驻波通过IDT转换回电信号通过天线发送给阅读器。通过该回波信号可以解析出SAWR的谐振频率。谐振频率f0由SAW波速v0及IDT周期λ0决定,如公式(1):
f0= v0 λ0 。 (1)
当转轴在扭矩的作用下出现弹性变形时,会导致粘贴于轴上SAWR的SAW波速以及IDT结构发生改变,最终导致谐振频率f0改变[12]。
由图2可知,当弹性轴受到扭矩作用时,沿着轴线45°和135°两个方向上会受到数值相等方向相反的拉应力σ1与压应力σ3。如果按照这两个方向以差分的形式布置两个结构参数相同的SAWR1与SAWR2,可以通过检测SAWR1与SAWR2的回波信号,获取到两个谐振频率,最终通过谐振频率的改变量与扭矩的对应关系得到具体的扭矩值。
2 微带天线设计
2.1 设计指标的确定
通过分析SAW技术测量彈性轴扭矩的优势以及测量扭矩的基本原理,本文拟针对以铌酸锂为基底的中心工作频率在920 MHz的声表面波谐振器,设计一具有良好通信能力的信号传输天线。
已有研究对半波偶极子天线、小环天线、倒F天线(IFA)、微带天线以及折合振子等几种适用于射频技术的天线进行了分析[13-18],本研究决定使用矩形微带天线作为重点研究内容,因为与其他天线相比,矩形微带天线是平面结构,结构简单,易于加工且方便布置于EPS系统狭小的空间内,满足工程上大批量生产的要求,而且微带天线可以同时在多频段工作,更易与SAW传感器阵列相匹配[19]。
微带天线共有微带线、同轴以及电磁耦合3种馈电方式,虽然同轴馈电方式结构上比较复杂,但是其天线位置位于辐射层背面,不受天线辐射影响,且馈电点可以选择在天线内的任意位置上,方便实现阻抗的匹配。所以,本文选择同轴底面馈电方式的微带天线作为最终的天线形式。
2.2 天线参数求解
微带天线由3部分构成,最底层的参考地、中间的介质层以及覆在介质层上的辐射元,具体结构如图3所示。本文设计的微带天线介质层采用FR4A1级覆铜板材料,厚度h=1.6 mm,介电常数εr=4.4,耗损正切tan δ=0.02。
在已知天线工作的中心频率f后,可以计算出辐射元的宽度w,即为:
w= c 2f εr+1 2 - 1 2 。 (2)
式中:c为光速。
当考虑到边缘缩短效应后,实际的辐射元长度L应为:
L= c f εe -2ΔL。 (3)
式中:εe是有效介电常数;ΔL是等效辐射缝隙长度。它们分别可以通过下式计算得出:
εe= εr+1 2 + εr-1 2 1+12 h w - 1 2 。 (4)
ΔL=0.415h εe+0.3 w h +0.264 εe-0.258 w h +0.8 。 (5)
矩形微带天线的工作主模式为TM10模,这就意味着电场只在L方向上改变,而在w方向上保持不变,所以,当天线输入阻抗为50 Ω时,馈电在L方向上的位置可以由下式计算得出:
Xf= L 2 ξre(L) 。 (6)
ξre(L)= εr+1 2 + εr-1 2 1+12 h L - 1 2 。 (7)
通过经验公式计算所得的具体天线结构尺寸见表1。
2.3 天线参数优化及结果分析
在HFSS 15.0中建立一个新工程,将计算得出的所有天线参数初始值以变量的形式进行定义,可以为后续的结构参数优化节省大量的时间。除具体的结构参数,还需要设定软件仿真时的分析类型为默认类型,模型的长度单位为mm。所建天线模型如图4所示。
通过公式(1)—(7)可以清楚的发现,当天线的结构与材料固定后,谐振中心频率与匹配阻抗只与辐射元的长、宽和介质层的厚度有关,通过HFSS 15.0软件的优化仿真功能确定了中心频率为920 MHz时的天线结构尺寸以及其重要性能参数的仿真结果,优化后的天线结构参数见表1。
采用表1中所优化后的相关天线结构参数,对天线参数进行二次建模并进行相关性能参数仿真求解,由图5可知天线在920 MHz中心频率处的回波损耗为-29.32 dB,相对带宽(RBW)=(0.927 7-0.911 5)/0.920 0×100%=1.8%,大于0.1%的行业要求。由图6的史密斯圆图可以发现天线在920 MHz中心频率处的S11参数为0.93,接近于理想值1。
3 系统性能测试
根据仿真优化结果,制作天线,如图7所示。
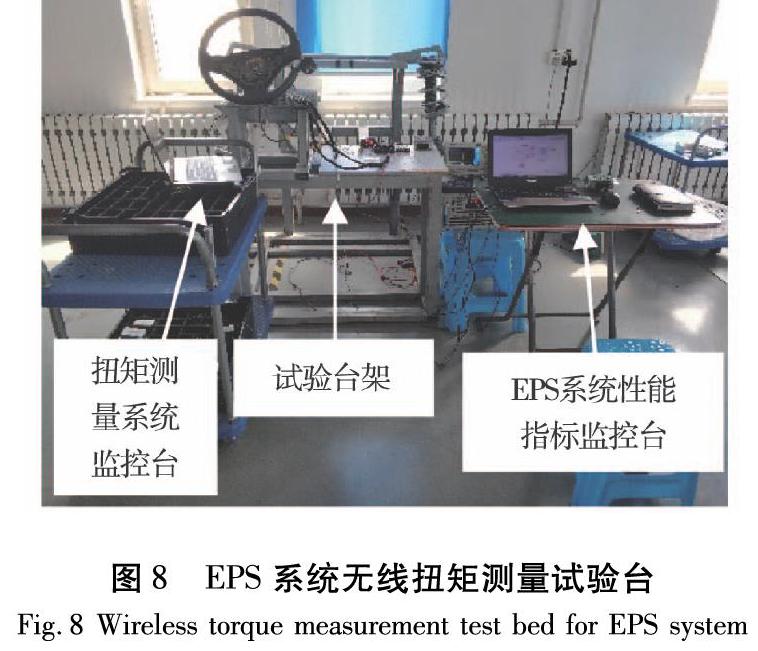
为了进一步验证所设计天线在EPS系统中利用SAW进行转向扭矩测量的可行性,本文搭建了无线测量系统试验台,如图8所示。
将无线测量系统安装在EPS综合性能测试试验台上,测试台组成与结构如图8所示。此时,操作人员顺时针旋转转向盘,标准扭矩传感器(海拉扭矩转角传感器)检测到的扭矩值,会通过EPS系统性能指标监控台上的电脑显示界面呈现出来,采用无线测量系统得到的谐振频率值,会通过扭矩测量系统监控台转变为电压输出信号在显示界面呈现出来,当转向盘达到极限位置时,改为逆向旋转至极限位置,并往复旋转数次。
图9为SAWR1、SAWR2及传统接触可变电阻式EPS系统扭矩传感器在EPS系统综合性能测试试验台上进行测试后的输出数据。图9(a)是SAWR1在经过反复正向与逆向旋转弹性轴后进行的输出信号采样,采样点共5 000个,图中阶跃部分为外部输入信号不稳造成的,与传感器本身性能无关。图9(b)是SAWR2的输出信号采样图,采样点同样为5 000个。图9(c)为利亚纳车型原有可变电阻式扭矩传感器的输出信号采样图,采样点为5 000个。
通过图9(a)、(b)、(c)对比分析得知,本文所提出的基于声表面波谐振器与同轴底面馈电方式的微带天线所组成的EPS系统扭矩测量系统,在线性度、抗噪声及输出信号稳定性等方面均有着明显的优势。
4 结论
本文设计了一款短距离通信的同轴底面馈电方式的微带天线,主要由参考地、介质层、辐射元和射频传输线组成。通过HFSS 15.0软件进行了天线的三维结构建模与各可变参数的优化,加工天线实物。并将无线扭矩测量系统搭载于EPS综合性能测试试验台上进行了系统试验。
【参 考 文 献】
[1] 张硕,余强,闫光辉,等.商用车EPS助力控制策略的研究[J].汽車工程,2013,35(9):812-816.
ZHANG S, YU Q, YAN G H, et al. Study on EPS power control strategy for commercial vehicles[J]. Automotive Engineering, 2013, 35(9):812-816.
[2] 王岩,储江伟.扭矩测量方法现状及发展趋势[J].林业机械与木工设备,2010,38(11):14-18.
WANG Y, QU J W. Current situation and development trend of torque measurement methods[J]. Forestry Machinery and Woodworking Equipment, 2010, 38(11):14-18.
[3] 赵浩.一种基于霍尔效应的扭矩传感器[J].传感技术学报,2016,29(10):1505-1508.
ZHAO H. A torque sensor based on hall effect[J]. Journal of Sensing Technology, 2016, 29(10):1505-1508.
[4] 吕华溢,杨军,宋娜.轴系扭矩测量方法与发展趋势[J].计测技术,2017,37(2):6-10.
LV H Y, YANG J, SONG N. Measurement method and development trend of shaft torque[J]. Measurement Technology, 2017, 37(2):6-10.
[5] 李志鹏,方玉良,杨凤英,等.电动助力转向系统扭矩传感器研究现状与发展趋势[J].传感器与微系统,2013,32(8):11-13.
LI Z P, FANG Y L, YANG F Y, et al. Research status and development trend of torque sensor for electric power steering system[J]. Sensors and Microsystems, 2013, 32(8):11-13.
[6] 陈世超,易伟,李程.动态扭矩检测技术研究[J].中国测试,2016,42(11):75-78.
CHEN S C, YI W, LI C. Research on dynamic torque detection technology[J]. China Test, 2016, 42(11):75-78.
[7] 余永华,董俊威.逆磁致伸缩扭矩传感器特性分析[J].武汉理工大学学报,2017,39(1):68-72.
YU Y H, DONG J W. Characteristic analysis of inverse magnetostrictive torque sensor[J]. Journal of Wuhan University of Technology, 2017, 39(1):68-72.
[8] 童锐.声表面波扭矩检测研究[D].南京:南京航空航天大学,2016.
TONG R. Research on torque detection of acoustic surface wave[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016.
[9] 王艳新,唐文秀,吴函,等.基于多传感器融合技术的智能抢险救灾机器人设计[J].林业机械与木工设备,2018,46(5):17-20.
WANG Y X, TANG W X, WU H, et al. Design of intelligent emergency rescue robots based on multi-sensor fusion technology[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(5): 17-20.
[10] 李涛,林杰俊,李江,等.基于光纤光栅的扭矩传感器[J].船舶工程,2017,39(2):27-31.
LI T, LIN J J, LI J, et al. Torque sensor based on fiber Bragg grating[J]. Ship Engineering, 2017, 39(2):27-31.
[11] VARADAN V V, VARADAN V K, BAO X Q, et al. Wireless passive IDT strain microsensor[J]. Smart Materials and Structures, 1997, 6(6), 745-751.
[12] 孙聪.声表面波扭矩传感系统的设计与实现[D].南京:南京航空航天大学,2017.
SUN C. Design and implementation of surface acoustic wave torque sensing system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017.
[13] 周静,谭亮.扭矩传感器SAW在船舶推进主轴扭矩检测的应用[J].舰船科学技术,2018,40(10):100-102.
ZHOU J, TAN L. Application of torque sensor SAW in torque detection of ship propulsion spindle[J]. Ship Science and Technology, 2018, 40(10):100-102.
[14] 李婷.RFID关键技术及其应用研究[D].南京:南京邮电大学,2017.
LI T. RFID key technology and its application research[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2017.
[15] 方慧.矩形宽带微带天线的设计[J].物联网技术,2017,7(4):52-53.
FANG H. Design of rectangular broadband microstrip antenna[J]. Internet of Things Technology, 2017, 7(4):52-53.
[16] 闫天婷.基于微带贴片天线的应变传感器与检测技术研究[D].北京:北京工业大学,2017.
YAN T T. Research on strain sensor and detection technology based on microstrip patch antenna[D]. Beijing: Beijing University of Technology, 2017.
[17] 姚小勇,朱德灿.传感器在无人驾驶汽车中的应用研究[J].林业机械与木工设备,2020,48(1):32-35.
YAO X Y,ZHU D C. Research on application of sensors in driver-less vehicles[J].Forestry Machinery & Woodworking Equipment,2020,48(1):32-35.
[18] KIRUTHIKA R, SHANMUGANANTHAM T. Comparison of different shapes in microstrip patch antenna for X-band applications[C]// International Conference on Emerging Technological Trends, 2016:1-6.
[19] 劉岩,潘勇,曹丙庆,等.声表面波阵列传感器研究进展[J].化学传感器,2010,30(1):25-29.
LIU Y, PAN Y, CAN B Q, et al. Research progress of surface acoustic wave array sensor[J]. Chemical Sensors, 2010, 30(1):25-29.
