岸基北斗IGSO卫星反射信号相位测高
2020-04-13杭斯加张云李彬彬杨树瑚韩彦岭
杭斯加,张云,2,李彬彬,杨树瑚,韩彦岭
(1.上海海洋大学 信息学院,上海 201306;2.农业部渔业信息重点实验室,上海 201306)
0 引言
海平面高度主要受冰川融化的影响,对海运管理、海洋农业开发、港口建设和渔业捕捞等人类活动产生重大影响,会造成巨大的经济损失,威胁沿海地区人民的生命财产安全。因此,对海平面变化的监测就显得极为重要。目前,全球导航卫星系统反射信号技术(global navigation satellite system reflected signals,GNSS-R)、中分辨率成像光谱仪(moderate-resolution imaging spectroradiometer,MODIS)和合成孔径雷达(synthetic aperture radar,SAR)等多种技术手段已应用于海面高度的监测。其中,利用GNSS-R 技术进行海面高度测量的概念在1993年由欧洲空间局专家Martin-Neira 首次提出[1]。
随着全球导航卫星系统的发展,GNSS-R 技术由于其全球覆盖、全天候可用、低成本和多波段的特点,受到全球学者的关注,并开展了广泛的研究[2-5]。北斗导航卫星系统(BeiDou navigation satellite system,BDS)是GNSS-R 的重要信号源之一。北斗系统采用了混合星座的设计,包括3种卫星:倾斜地球同步轨道(inclined geosynchronous orbit,IGSO)卫星、中圆地球轨道(middle earth orbit,MEO)卫星和地球静止轨道(geostationary earth orbit,GEO)卫星。这与其他导航卫星系统有着很大的差异,例如GPS 系统就只有MEO 卫星。现阶段,北斗系统已实现区域服务能力,可以为55°S~55°N,70°E~150°E 的大部分区域连续提供公开服务,预计2020年完成全部北斗导航卫星的发射组网,将为全球用户提供服务[6]。
北斗反射信号(BeiDou reflected signals,BeiDou-R)遥感技术近年来已经取得了众多研究成果,其研究热点集中在海面测风[7]、海面溢油检测[8]、土壤湿度探测[9]及海面波高测量[10]等方面。
在海面高度测量领域,全球学者在GPS反射信号(GPS reflected signals,GPS-R)遥感技术研究方面取得大量进展,主要有码测高[11-14]、载波相位测高[15-21]和利用信噪比(signal to noise ratio,SNR)数据测高[22-24]等方法。而基于BeiDou-R 技术的海面测高研究的报道较少[25-26]。
与北斗MEO卫星相比,IGSO卫星具有特殊的轨道姿态和较长的可见时间,可以在较长的实验时间内监测海面变化情况;相对于北斗GEO卫星,IGSO卫星的位置和仰角在运行过程中不断变化,其镜面反射点的位置也随卫星运行而变化,因此可以在较大的实验区域内监测海面变化情况。因此,IGSO 卫星兼具MEO和GEO卫星的优点,利用其反射信号能够兼顾海面测高的时间和空间分辨率。
本文将GPS MEO卫星的相位测高方法[16]应用于北斗系统IGSO卫星的测高研究中,于2014年分别在上海滴水湖和浙江大洋山海域开展了北斗IGSO卫星岸基相位测高实验,利用接收到的北斗IGSO卫星B1波段信号测得湖面和海面的高度。实验中滴水湖的水表面相对平坦,而大洋山的海平面受到海潮涨落的影响,海面高度变化较大,但在较短的实验时间内也可认为海平面是平坦的。将IGSO卫星和北斗GEO卫星的相位测高结果与实际的海面高度测量值进行了对比分析,表明不同的实验环境中利用岸基IGSO卫星反射信号相位测高的可行性。实验同时分析了海面实验中北斗IGSO卫星仰角变化对相位测高结果产生的影响。
1 BeiDou-R海面高度反演原理
1.1 北斗IGSO卫星
北斗IGSO卫星轨道高度为35 786 km,轨道倾角55°。截止至2018年,共有5颗北斗IGSO卫星在轨运行。图1表示了以中国上海为观测点时,2014年10月20日00:00至2014年10月21日00:00,北斗IGSO8、GEO2和GPS G10卫星仰角度数的变化情况。
从图1可以看到,在亚太地区,一天中北斗IGSO 卫星的可见时间长于MEO 卫星。因此利用IGSO 卫星的反射信号可以长时间地对某一特定区域进行测量。IGSO 卫星在运行过程中,其仰角变化率并非一直不变,如图1所示,北斗IGSO8 卫星在0:00—5:30的仰角变化率约为12°/h,而在7:00—10:00的仰角变化率约为0.67°/h。针对北斗IGSO卫星的该特点,本文分析了卫星仰角变化率对相位测高结果的影响。
1.2 北斗IGSO卫星载波相位测高原理

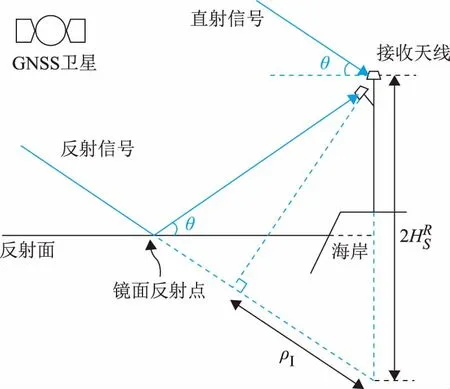
图2 GNSS-R相位测高几何模型
FABRA等提出的GPS MEO卫星相位测高原理[19]可以扩展应用在北斗IGSO卫星的湖面和海面相位测高实验中。直射信号场Ed和反射信号场Er可以合成干涉相干复数场CI,干涉相干场中包含了干涉相位φI,如式(1)所示:
CI(t,sat)=Er(t,sat)·Ed(t,sat)*=
|Er(t,sat)|·|Ed(t,sat)|eiφI(t,sat)
(1)
式中:t表示接收信号的时间序列;sat 表示捕获跟踪到的北斗卫星的伪随机噪声(pseudo random noise,PRN)码。
(2)
式中:φ0表示一个不确定的相位偏移常量;λ表示卫星信号载波波长;ζφ表示相位测高的总误差量。
(3)
(4)
(5)
反射面粗糙度对相位测高的结果有重要的影响。本文中反射面粗糙度主要受海面风速和实验区域海浪的影响,可以用干涉相位的均方根RMSφI表示反射面粗糙度,如式(6)所示:
(6)
式中:φI是1 s的干涉相位,可以由1 ms的CI经过相干积分后得出;n表示所选取的φI的时间区间。
1.3 数据处理过程

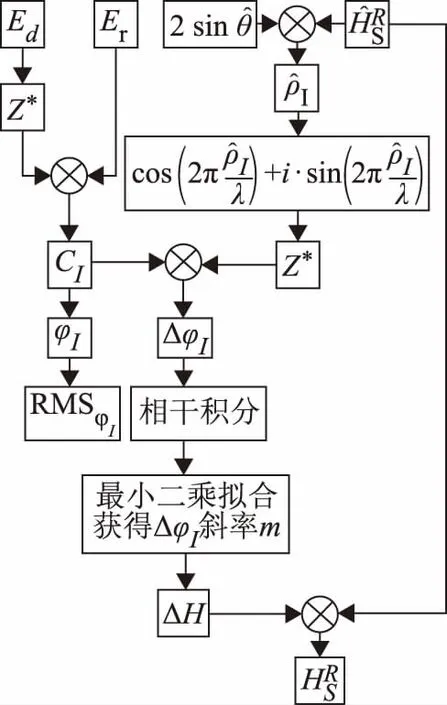
图3 数据处理流程图
(7)

(8)
2 相位测高实验
2组相位测高实验均使用北斗系统B1波段信号数据。实验中使用了2组天线:直射右旋圆极化(direct right handed circular polarization,D-RHCP)天线和反射左旋圆极化(reflected left handed circular polarization,R-LHCP)天线。R-LHCP 天线的参数如图4所示。D-RHCP 天线和R-LHCP 天线的参数如表1所示。
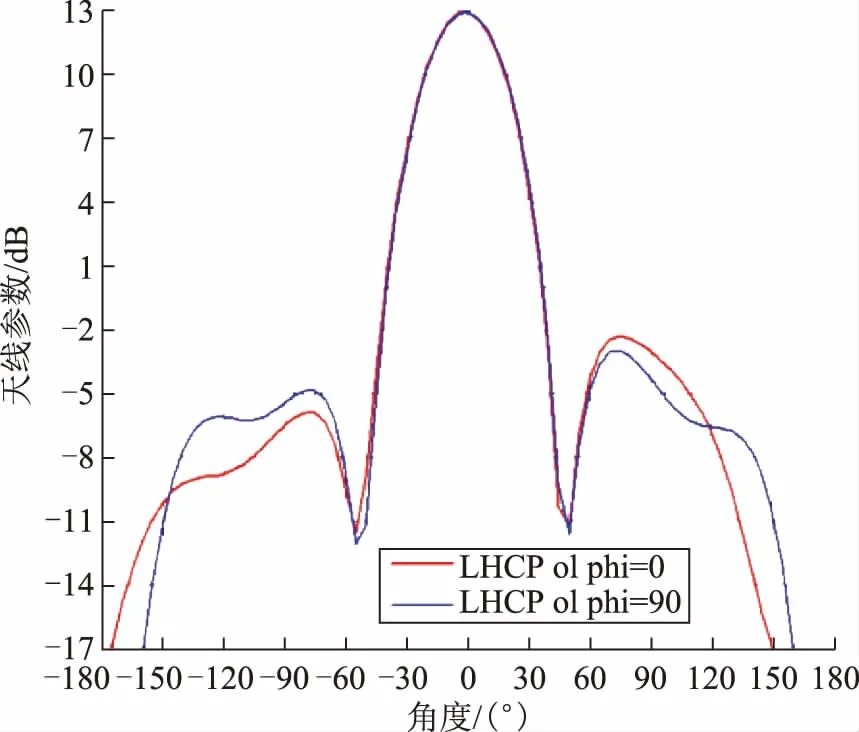
图4 R-LHCP天线参数图
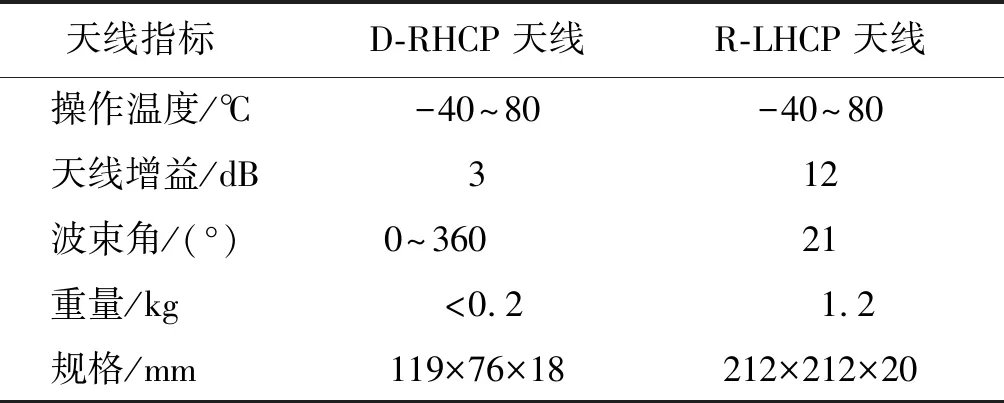
表1 2种不同天线的参数比较
如图5所示,实验中使用了4通道GNSS卫星中频信号接收机,选择其中2个通道接收D-RHCP信号和R-LHCP信号。射频模块为MAX 2769芯片,可接收GPS和北斗信号,采样频率为16.369 MHz,传输速率约为16 Mb/s[28-29],由与之相连的计算机运行数据记录程序。
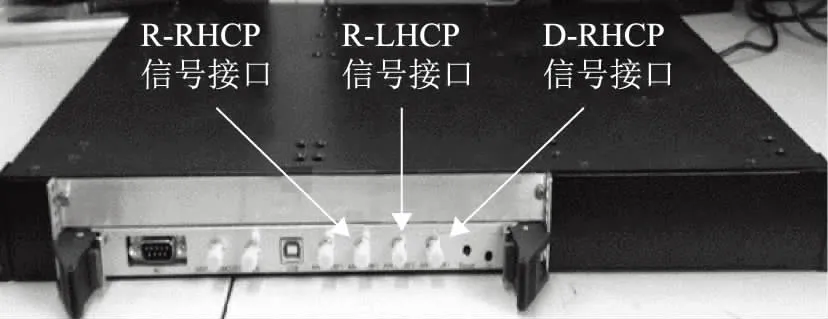
图5 GNSS卫星信号接收机
2.1 湖面实验
湖面实验在中国上海市滴水湖(30°54′15.93″N,12°56′58.50″E)开展,实验场景如图6所示。接收天线架设在湖边的平台上,使用D-RHCP 天线和R-LHCP 天线分别接收直射和反射信号数据。实验从2014年8月21日12:10开始,至当日12:45结束,通过实地测量可知天线到湖面的垂直距离为5.2 m。湖面风速为3.4~7.2 m/s,风向为东风。
(高度约5.2 m,风速约3.4~7.2 m/s,东风。2014年8月21日12:10~12:45,中国上海。)图6 滴水湖实验场景
2.2 海面实验
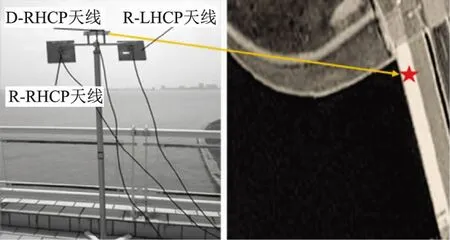
海面实验在中国浙江省大洋山海域(30°34′41.6″N,122°3′51.76″E)开展,实验场景如图7所示。实验从2014年10月18日开始,10月19日结束。为了获取海面的潮位信息,每10至20分钟用望远镜观察并记录立在实验海域中标尺上的潮位数据,实验场景如图8所示。在2014年10月18日21:10,通过实地测量获得天线到海岸的垂直距离为3.2 m,海面到海岸的垂直距离约为2.3 m。实验区域的风速为8~13.8 m/s,风向在实验期间由东南风变为西南风。
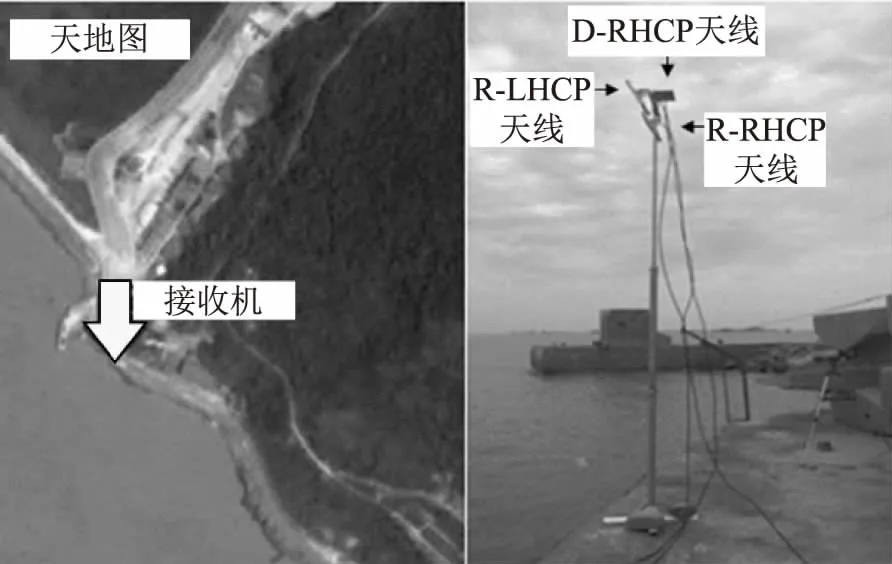
(天线到海面的高度约5.5 m,风速约8~13.8 m/s,东南风转西南风。2014年10月18日21:10,中国舟山。)图7 大洋山海面实验场景
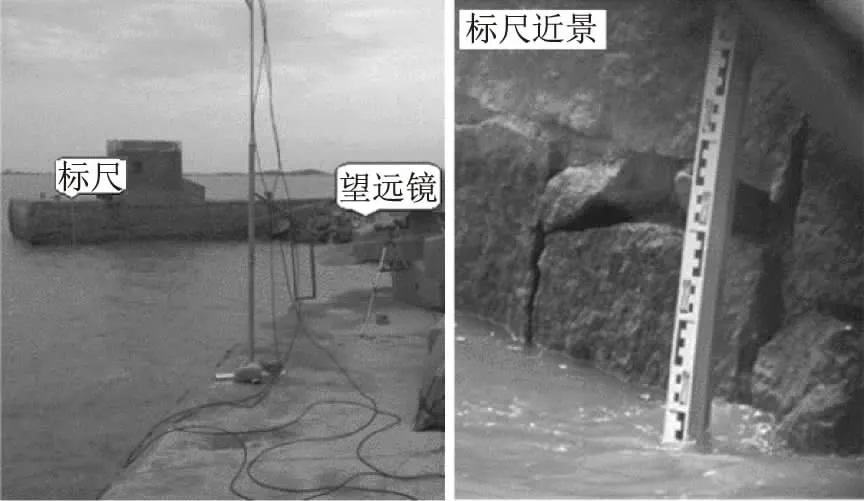
图8 海面实验中测量海面潮位高度
3 实验数据分析
3.1 湖面实验测高结果
在湖面实验中,需要根据卫星的仰角、方位角和位置信息选择合适的卫星作为发射机,使反射信号的镜面反射点落在实验区域内。实验中使用了北斗IGSO7和IGSO10卫星的B1波段信号进行分析。图9是卫星镜面反射点运动的轨迹,其中黑色三角形表示接收机的位置,天线的朝向为西南,如图中黑色箭头所示。蓝线表示IGSO10卫星的镜面反射点在2014年8月21日12:10—12:45的运动轨迹。红线表示相同时间段内IGSO7卫星的镜面反射点的运动轨迹。空心点表示镜面反射点开始移动时的位置,五角星表示镜面反射点结束移动时的位置。

图9 湖面实验中IGSO卫星镜面反射点运动轨迹
图10是IGSO7和IGSO10卫星的方位角和仰角变化情况。图10(a)中的红线表示IGSO7卫星的方位角,蓝线表示IGSO10卫星的方位角。图10(b)中的红线表示IGSO7卫星的仰角从45°变化到35.6°,蓝线表示IGSO10卫星的仰角从58.7°变化到48.5°。IGSO7卫星在实验时间内的仰角变化率为16.11°/h,IGSO10卫星的仰角变化率为17.49°/h,2颗卫星的仰角变化率相近。
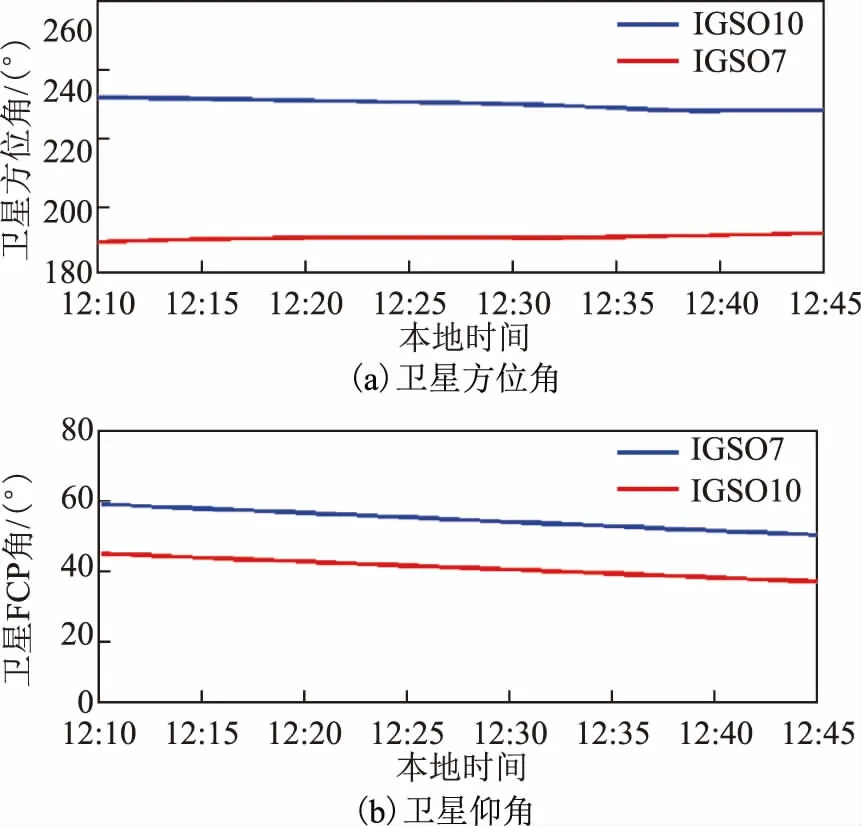
图10 湖面IGSO卫星方位角和仰角变化情况
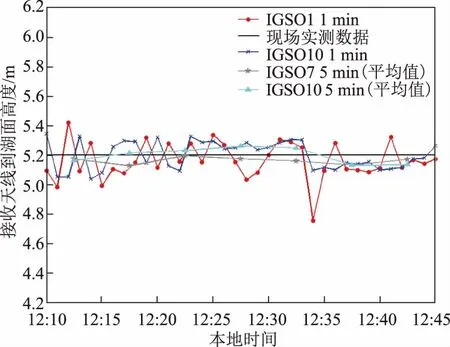
图11 IGSO7和IGSO10卫星湖面测高结果
湖面相对于海面较为平坦,且在实验过程中湖面高度的变化可以忽略不计。在数据采集程序中设置了每1 min采集一组数据,在数据处理的过程中可以先分别计算出湖面高度数据,再对每5 min的数据计算平均值。因为对于每个1 min的数据集对应的剩余干涉相位ΔφI数据较少,在计算ΔφI的斜率时受到其中一些异常点的影响会更大,导致测高结果的误差较大,因此通过对每5 min的数据进行平均处理提高结果的精度。测得的湖面到接收天线的高度如图11所示。图中黑色实线表示现场实际测量的海面高度,红色点画线表示IGSO7卫星1 min数据测得的海面高度,蓝色点画线表示IGSO10卫星1 min数据测得的海面高度,灰色点画线表示IGSO7卫星测得的海面高度数据的5 min数据平均值,青色点画线表示IGSO10卫星测得的海面高度数据的5 min数据平均值。
表2列出了用IGSO7和IGSO10卫星测得的湖面高度与实际测量的高度对比的均方根误差(root mean square error,RMSE),如式(9)所示,该值反映了测高结果的精度。
(9)

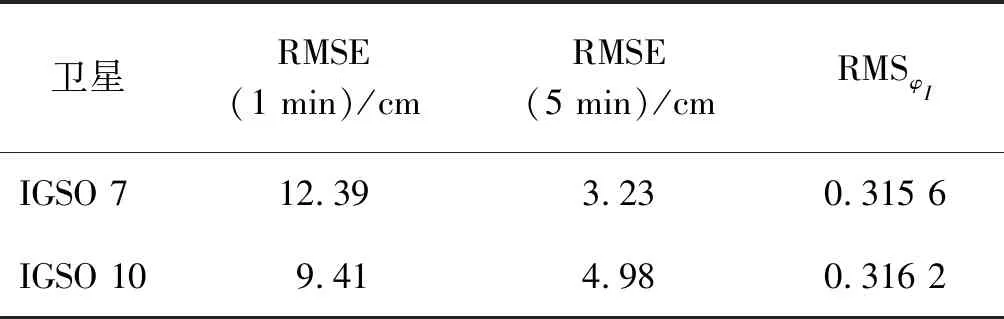
表2 IGSO 7和IGSO 10卫星湖面测高结果比较
3.2 海面实验测高结果
在海面实验中,使用了IGSO8、IGSO9和IGSO10卫星B1波段信号数据进行分析,并用GEO3卫星的数据对比分析。图12是这4颗卫星的镜面反射点的运动轨迹。黑色三角形是接收机的位置,箭头方向表示天线的朝向为正南方。红线是IGSO10卫星在2014年10月18日21:10至2014年10月19日10:30镜面反射点运动的轨迹。蓝线是IGSO9卫星在2014年10月18日21:10至2014年10月19日3:30镜面反射点运动的轨迹。绿线是IGSO8卫星在2014年10月18日3:30至2014年10月19日3:30镜面反射点运动的轨迹。空心点表示镜面反射点开始移动时的位置,五角星表示镜面反射点停止移动时的位置,GEO3卫星的镜面反射点为黄色圆点,且位置固定不动。

图12 海面实验中北斗IGSO和GEO卫星镜面反射点的运动轨迹
图13表示了这3颗IGSO卫星方位角和仰角变化的情况。图13(a)中的红线表示IGSO10卫星的方位角,蓝线表示IGSO9卫星的方位角,绿线表示IGSO8卫星的方位角。图13(b)中的红线表示IGSO10卫星的仰角从43°变化到77°再变化到33°,蓝线表示IGSO9卫星的仰角从72°变化到18°,绿线表示IGSO8卫星的仰角从49°变化到65°。从图中可以看出IGSO10卫星仰角的变化率在不同的时间段有明显差异,其对测高结果的影响将在下文做进一步分析。
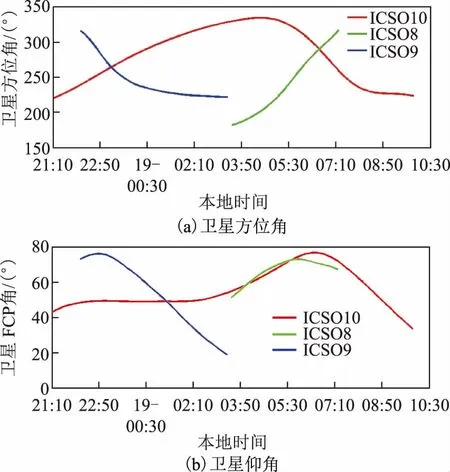
图13 海面实验中IGSO和GEO卫星方位角和仰角变化情况
根据相位测高理论测得的海面到接收天线的高度如图14所示。实验中使用的每组数据的时长为30 min。如图14所示,所有IGSO卫星的测高结果几乎都与潮汐高度的实测数据一致。同时也使用北斗GEO3卫星的数据计算出海面高度,与IGSO卫星的测高结果对比分析,相同实验区域的北斗GEO卫星测高结果和分析可以参考文献[26]。
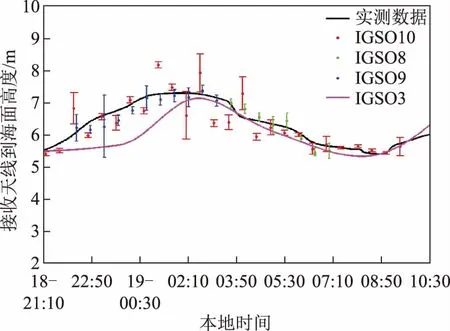
图14 北斗IGSO 8、9、10卫星海面测高结果图
表3是北斗IGSO和GEO卫星在两段实验时间内的测高结果与实际测量的高度对比的RMSE值。从2014年10月18日21:10至2014年10月19日2:10的时间段内,GEO卫星测得海面高度的RMSE为63.04 cm,IGSO卫星测得海面高度的RMSE为38.47 cm;从2014年10月19日2:10至2014年10月19日10:30的时间段内,GEO卫星测得海面高度的RMSE为3.31 cm,IGSO卫星测得海面高度的RMSE为32.16 cm。IGSO卫星的相位测高结果在时间段1内优于GEO卫星的结果,而在时间段2内GEO卫星的相位测高结果优于IGSO卫星的结果。IGSO卫星的高度反演的结果相对于GEO卫星更加精确,这是由于GEO卫星的镜面反射点的位置固定,而IGSO卫星的镜面反射点不断移动。相对于IGSO卫星,海面环境的变化对GEO卫星的相位测高结果的影响更大。受到海风和海潮的作用,当海面粗糙度越大时,GEO卫星测高结果的精度越小。
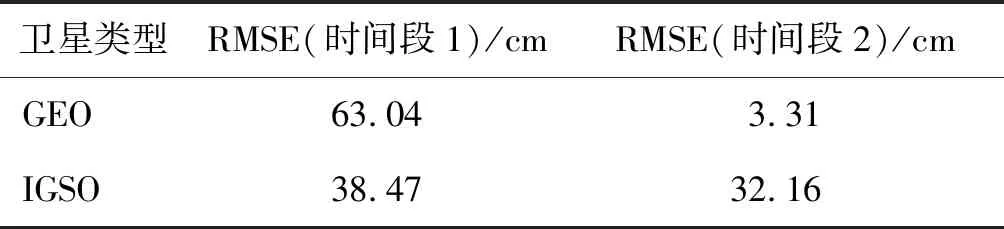
表3 IGSO和GEO卫星海面测高结果比较
注:时间段1为2014年10月18日21:10至2014年10月19日2:10;时间段2为2014年10月19日2:10至2014年10月19日10:30。
如表4所示,IGSO8卫星测得海面高度与实际测量的高度对比的RMSE为17.96 cm,IGSO9卫星测得海面高度与实际测量的高度对比的RMSE为15.27 cm,IGSO10卫星测得海面高度与实际测量的高度对比的RMSE为43.45 cm。
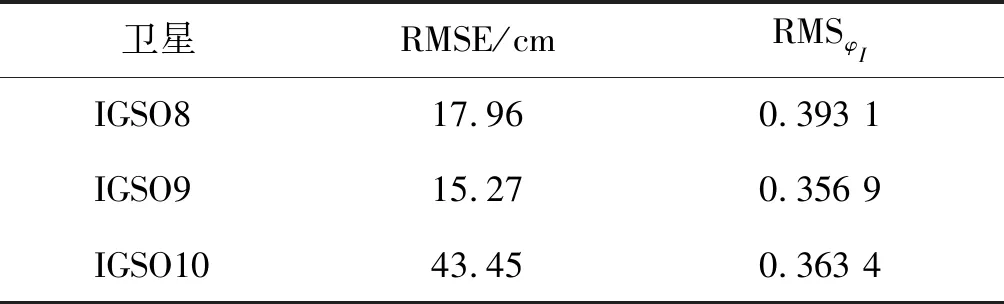
表4 IGSO 8、9、10卫星海面测高结果比较
由表4可见,IGSO10卫星测高结果的精度最差。为了分析其中的原因,将IGSO10卫星的数据分为3个时间段进行分析,这3段时间中海面高度的RMSE 如表5所示。从表5的结果可以看出测高精度在时间段C 中最好,在时间段B 中最差。通过与图13对比分析,可以确定卫星的仰角变化情况是影响测高精度的重要因素。
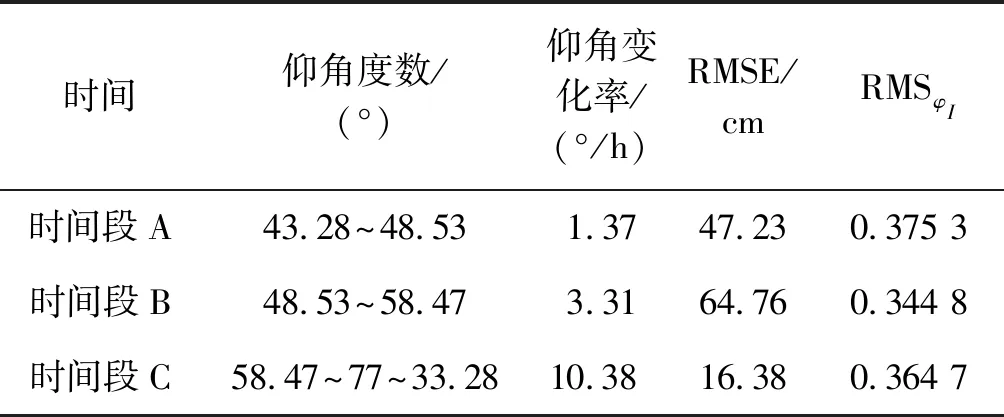
表5 IGSO 10卫星在3个时间段内的测高结果比较
注:时间段A为2014年10月18日21:10至2014年10月19日1:00;时间段B为2014年10月19日1:00至2014年10月19日4:00;时间段C为2014年10月19日4:00至2014年10月19日10:00。
如图13所示,在时间段A、B 内卫星的仰角变化明显率小于时间段C 内的仰角变化率。在实验数据处理的过程中使用了式(7)中的标准最小二乘线性拟合方法,该方法的准确性与卫星仰角的变化相关,仰角变化较大的卫星数据有助于提高相位测高的精度[27]。如表5所示,尽管在时间段A 的仰角变化率小于时间段B,但时间段A 测得海面高度的RMSE比时间段B 的RMSE 小,这是由于在时间段B 内IGSO10卫星的镜面反射点更靠近岸边,且海水逐渐退潮,岸边礁石逐渐露出海面,从礁石上反射的信号功率增强,影响了在数据处理过程中构建干涉相干复数场CI的过程,进而使得相位测高结果的误差扩大,精度减弱。虽然IGSO10卫星在时间段A、B内的仰角变化较小,但IGSO10卫星也不能使用北斗GEO卫星的测高方法,这是因为IGSO10卫星的仰角变化远大于GEO卫星的仰角变化值,如北斗GEO3卫星的仰角在实验13 h内只发生了约3°的变化,而IGSO10卫星在时间段A(约4 h) 内仰角变化了5.25°,在时间段B (3 h)内仰角变化了9.94°。
对比表2和表4的结果可以发现海面实验的IGSO卫星测高结果RMSφI均大于湖面实验的RMSφI。在湖面实验中,研究区域的风速约为3.4~7.2 m/s,在海面实验中,研究区域的风速约为8~13.8 m/s,海面的最高潮和最低潮之间的高度相差约2 m,RMSφI显示了海面实验中的反射面粗糙度大于湖面实验。此外,通过表3和表4可以看出RMSφI和相位测高精度之间没有明显的相关关系,可以利用表5和图14描述海面潮汐变化的情况。
海面相位测高实验中使用了约13 h的反射信号数据。原始信号数据设置为半小时采集一组,因此每半小时就可以获得一个海面测高结果。相对于其他遥感技术,时间分辨率大大提高。
由于缺乏浮标或其他测量工具,观测到的海洋潮位数据的精度很容易受到海面潮水浮动的影响。研究中只是初步分析了海面风速和潮汐变化对测高结果的影响,缺少高精度的风速和风向数据,无法进一步研究海面粗糙度与测高精度之间的关系,在未来的实验中可以配合高精度的风速风向分析对相位测高结果的影响。
4 结束语
随着北斗导航卫星系统的不断发展完善,在GNSS-R技术的研究和应用中将获得更多的信号资源。基于载波相位测高原理和北斗IGSO卫星反射信号的特性,本研究团队开展了湖面和海面实验,验证了岸基北斗IGSO卫星反射信号相位测高的可行性。
在湖面实验中,利用北斗IGSO卫星反射信号测出了湖面到天线的垂直高度,测高精度可以达到厘米级。IGSO7卫星测高结果的RMSE(5 min平均值)为3.23 cm,IGSO 10卫星测高结果的RMSE(5 min平均值)为4.98 cm。
在海面实验中,最高潮时的海面高度和最低潮时的海面高度相差约2 m,IGSO卫星的测高性能比GEO卫星更为稳定,所有IGSO卫星的测高结果与潮位高度的变化相一致。其中,IGSO8卫星测高结果的RMSE 为17.96 cm,IGSO9卫星测高结果的RMSE 为15.7 cm,IGSO10卫星测高结果的RMSE 为43.45 cm。通过分析IGSO10卫星在3个不同时段内的测高结果(表5)可见,由于在相位测高过程中使用了标准最小二乘线性拟合的方法,卫星仰角变化率较大的卫星数据可以使相位测高的结果更加稳定。
反射面粗糙度也是影响相位测高结果的重要因素。在实验中,获得了反射面粗糙度、风速和潮汐变化之间的关系。然而,由于缺少高精度的风速和风向记录,无法对海面粗糙度做进一步的评估。
在2组实验中,时间分辨率相对于其他遥感方式提高较多,这也是GNSS-R 技术的主要优势之一。由于北斗MEO卫星的镜面反射点在实验区域内的时间很少,所以在实验中没有比较MEO卫星和IGSO卫星测高的结果。
BeiDou-R湖面相位测高实验的精度达到厘米级,并且湖面和海面相位测高实验的结果都有较高的精度,可见GNSS-R相位测高技术有着广阔的应用前景。目前,国际上已经开展了机载和星载GNSS-R数据的研究,这为相位测高的研究提供覆盖范围更大、时间分辨率更高的数据源,需要对各类误差修正模型加以研究。
