基于扰动观测器的瞬变电磁发射机恒压控制算法研究
2020-04-13田德志张一鸣张云睿王旭红
田德志,张一鸣,张云睿,梁 彪,王旭红
(北京工业大学 信息学部,北京 100124)
0 引 言
瞬变电磁法是一种常见的地球物理勘探方法,利用接地电极或不接地回线作为负载,向负载发射占空比为50%的双极性方波激发一次场,在一次场间歇,通过检测地下介质的感应二次场反演出地质信息。该方法因其方便灵活、受地形影响较小的优点,在矿产勘探、地下水探测和矿井采空区等方面得到了广泛应用。
瞬变电磁发射机是应用瞬变电磁法的必要设备,主要作用是稳定发射具有50%占空比的双极性方波。瞬变电磁发射机的工作特点决定了其需要进行频繁的空负载状态切换。作为时变、强非线性系统,负载扰动会影响工作稳定性。国内学者对瞬变电磁发射机的研究主要集中在电流下降沿整形方面[1-3],要求发射机线性度高,关断时间断的电流下降沿。主流电磁发射机多采用电池供电(如加拿大PHOENIX 公司的T-4发射机,澳大利亚Monex GeoScope 公司的Terra TEM24发射机等),具有携带方便的优点,且受负载扰动的影响较小,但电池供电的发射机难以支持长时间大功率的发射任务。采用发电机供电的发射机(如美国Zonge 公司的GGT-30)实测,发射波形并不理想,具有较大纹波。
传统的瞬变电磁发射机传统的电压闭环PID 控制是基于偏差调整控制量的控制方法,应用广泛,结构简单,具有一定的抗扰动能力,但其响应速度和动态性能较差,当系统受到强扰动时保证输出稳定。文献[4]提出基于假负载耗能的调节方式,在发射桥关闭后,系统向假负载供电,使系统一直处于负载状态。这种控制方式会降低系统效率,且在真假负载值相差较大时也会产生相同的问题。基于扰动观测器的前馈控制是一种主动抗扰的方式,可以在强扰动出现后迅速得到补偿量,在扰动产生影响前进行补偿,消除其对输出端的影响,明显提升系统的动态性能和抗干扰能力。文献[5]采用内膜扰动观测器估算扰动,通过与无差拍电流预测控制方案相结合,在提高电流跟踪精度、改善电流波形的同时,减小负载突变对永磁同步电动机所带来的影响。文献[6]针对PMSM 转速伺服系统设计了基于扰动观测器的电流环自适应滑模控制方法。利用扰动观测器估计系统的外部负载扰动,并前馈补偿到电流环控制器,有效抑制滑模控制系统抖振,保证系统具有良好的动态跟随性能。文献[7]建立了带有Boost 电路的光伏发电机模型,并设计了该模型基于扰动观测器的两级自由度反馈控制系统。仿真和实验结果证明,在极限条件下,该控制系统相较于传统控制器能够更好地保证系统的闭环性能。文献[8]在传统的PI 控制策略基础上提出了变积分参数比例积(VAPI)控制策略,以解决系统干扰问题。策略设计了扰动观测器测出参数摄动与负载变化带来的系统扰动,提高系统的收敛速度和抗扰动能力。基于扰动观测器的主动抗扰算法在电机控制方面得到了成功的应用,但目前还未在瞬变电磁发射机方面得到应用。文献[9]介绍了两相交错并联Boost 变换器,分析了其各开关模态并通过信号流程图建立起数学模型,通过仿真验证了扰动观测器对干扰有较好的衰减能力。文献[10]提出了一种基于干扰观测器控制三相AC-DC变换器的无偏模型预测算法,利用标准Luenberger 观测器估算未知干扰,消除了偏移跟踪误差,保证了闭环系统的全局稳定性。文献[11]通过设计状态观测器得到负载电阻和输入电压的估计值,使变换器输出电压跟踪参考值。
1 工作原理与拓扑结构
瞬变电磁勘探系统由电源、发射机、接收机、发射线圈以及接收线圈构成。在小功率发射时,发射机多采用电池供电;在大功率发射时,发射机多采用发电机供电。工作示意图如图1 所示。
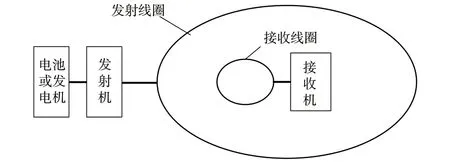
图1 瞬变电磁法工作示意图
瞬变电磁法工作原理为电磁感应定律。瞬变电磁发射机典型波形如图2 所示,其为占空比为50%的双极性方波,常见频率在0.062 5~32 Hz。周期内可以分为4 个时间间隔。在t0~t1时间段内,发射机向负载供电,在大地建立稳定的一次场;t1时刻开始,发射机停止供电,为维持一次场,根据电磁感应定律,地下介质激发出感应电流,并由此电流产生二次场;t1~t2时间段内,接收线圈接收感应二次场信号;t2~t4时间段,发射机反向供电,系统反向激发磁场。根据接收机采集的二次场数据,经过数据校正和TEM 反演,可以得到地下视电阻率,由此可以得到地址剖面图。
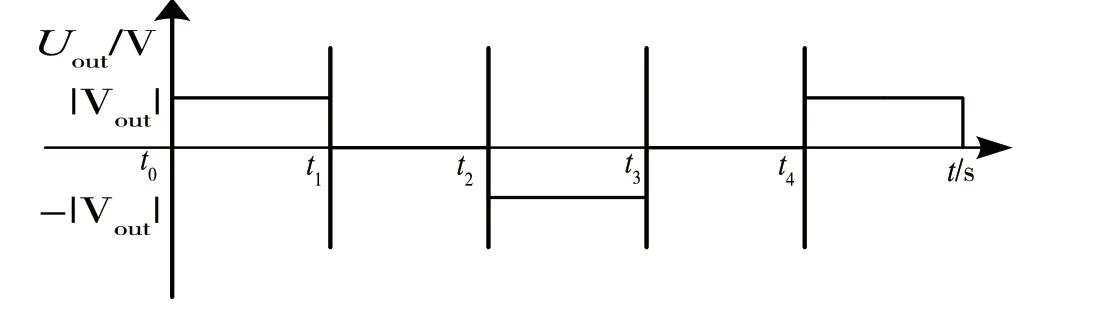
图2 瞬变电磁法典型波形
瞬变电磁发射机主体由两级全桥逆变器组成,拓扑结构如图3 所示。发射机采用三相380 V 发电机组供电,主体分为4 部分。H1为三相半控整流桥,通过相控整流技术完成系统软启动,将一级母线电压稳定维持在550 V 左右。H2为移相全桥变换器,通过调节H2桥占空比的大小控制整个系统的输出功率。H2桥通过移相控制、谐振电感Lr和谐振电容C1~C4的作用完成零电压开关,大大减小了开关管的电压应力,降低了系统损耗,提高了系统效率。H3为不控高频整流桥,由4 个电力二极管组成。H4为二级逆变器,输出频率为0.062 5~32 Hz,占空比为50%的双极性方波,为负载提供激发一次场的能量。
实际上,瞬变电磁发射机输出占空比50%的方波使其受到频繁的周期性负载扰动。系统处于空载状态时,容易造成二级母线电压的突增;系统处于负载状态时,容易造成二级母线电压的突减。传统的PI 控制算法通过二级母线电压偏差调整一级母线的占空比,偏差出现后通过反馈通道被动消除误差。对于变化缓慢的小信号扰动,该控制方式可以满足要求,并且具有设计简单、调节方便、适用性和可靠性强的优点。但是,对于频繁且强烈的周期性扰动,该控制方式暴露出动态跟随性能差的缺点。利用该算法会导致二级母线波动较大,在某些负载和发射频率下甚至达不到控制目标。
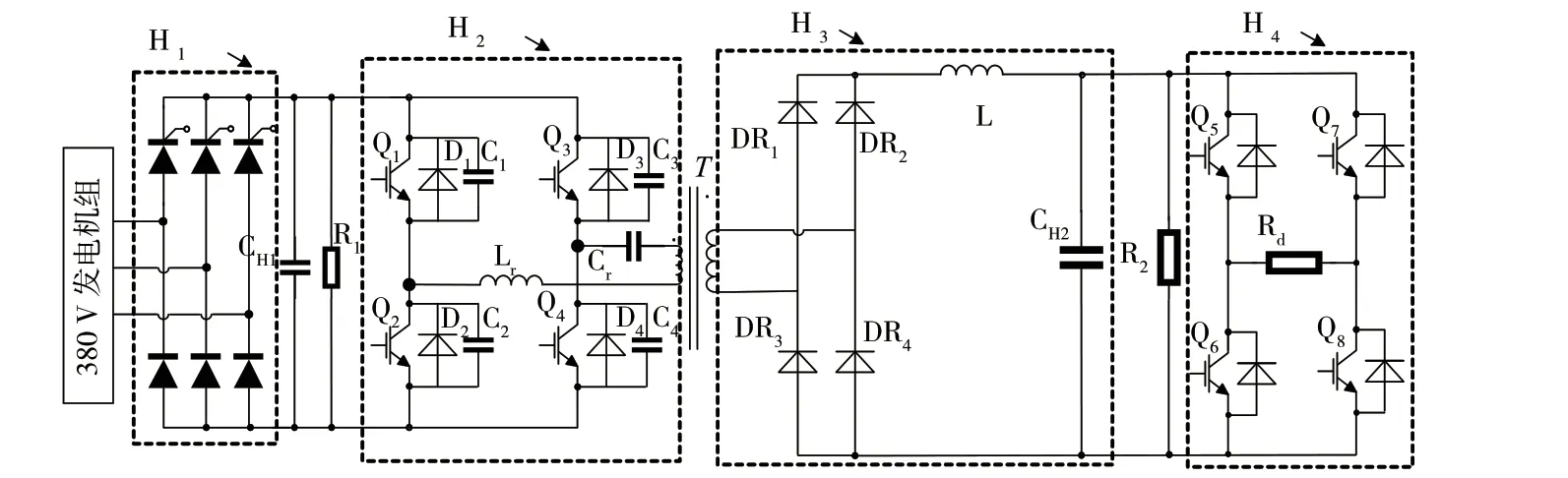
图3 瞬变电磁发射机拓扑结构图
2 扰动观测器
基于负载观测器的前馈控制算法是一种主动抗扰方法,因具有高精度和快速跟踪能力的优点得到了广泛应用。对于可以建立精确模型且扰动信号类型已知的系统,可以采用扰动观测器前馈系统进行主动抗扰。系统结构图如图4 所示。
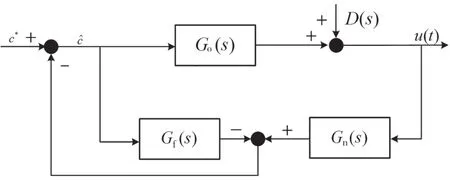
图4 扰动观测器前馈系统结构图
其中Go(s)为移相全桥变换器实际模型,D(s)为二级变换器等效扰动,Gn(s)为扰动观测器的模型,Gf(s)为滤波器。根据图4,可知:

从式(1)可知,模型确定的条件下,扰动观测器的特性主要由滤波器的时间常数、分子阶数和分母阶数决定。设计适当的滤波器使|Gf(s)|≈1,可使u≈Go(s)c*,从而消除扰动对系统的影响。通过求出系统的实际模型Go(s),根据控制目标通过扰动观测器模型可以得到控制量。通过理论控制量和前馈信号比较可以得到系统补偿量,将此补偿量反馈到输入端,提前将干扰进行补偿,可消除其对输出端的影响。
3 前馈控制系统设计与仿真验证
瞬变电磁发射机采用两级全桥串联拓扑,其中一级逆变器采用移相控制实现系统软开关,降低了开关损耗。建立开关变换器通常采用状态空间平均法或平均开关模型法,采用移相控制技术的开关变换器涉及6个开关模态,采用传统方法需要解3 阶系统。为简化建模过程,考虑全桥变换器和Buck 变换器的相似性,基于扰动因素分析建立考虑变压器漏感的发射机数学模型[11]如下:
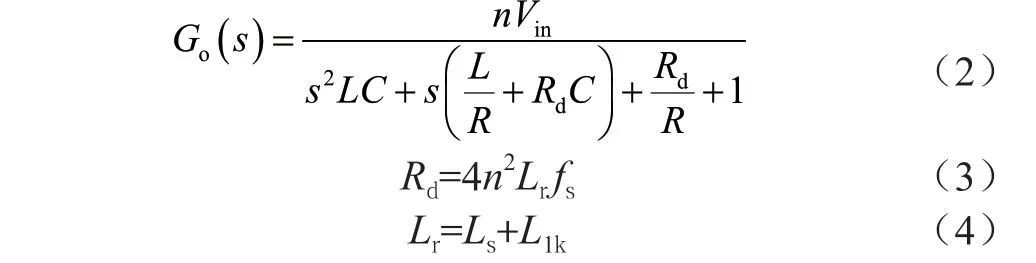
其中n为变压器变比,Vin为一级母线电压,L为二级母线滤波电感值,C为二级母线滤波电容值,L1k为变压器漏感值,Ls为谐振电感值,fs为移相逆变器开关频率。根据移相全桥变换器数学模型设计瞬变电磁发射机扰动观测器前馈控制系统结构,如图5 所示。
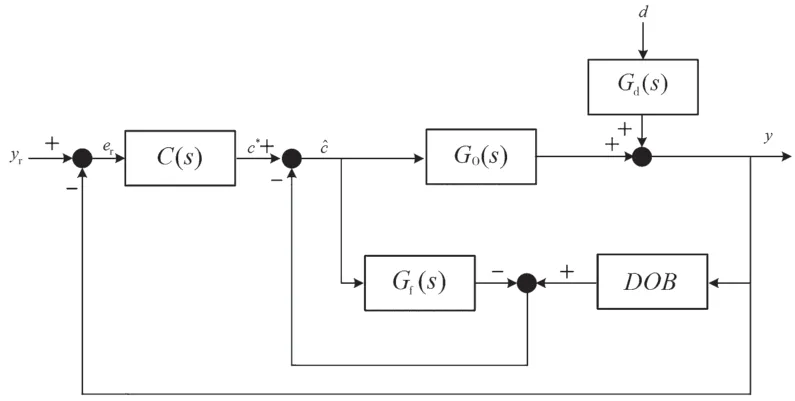
图5 瞬变电磁发射机扰动观测器前馈控制系统结构图
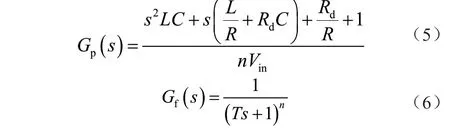
其中,C(s)为基础控制器传递函数,采用PI 控制算法,Go(s)为移相全桥控制到输出的传递函数,Gd(s)为扰动到系统的传递函数,DOB为扰动观测器传递函数,具体设为Gn(s)=Gp(s)Gb(s)。为根据调节目标得到控制量,令Gp(s)=Go-1(s)、Gb(s)=Gf(s),保证前馈量对系统的影响不变,则有:
控制系统由基础控制器C(s)及反馈回路组成的外环支路和扰动观测器Gn(s)及补偿回路组成的内环支路组成。系统处于稳定状态时,主要通过外环支路进行电压闭环控制,保证系统的稳定性。当强扰动出现时,系统通过扰动观测器及补偿回路对干扰进行补偿,增强系统抗扰动能力,避免干扰影响到输出端。瞬变电磁发射机参数如表1 所示。
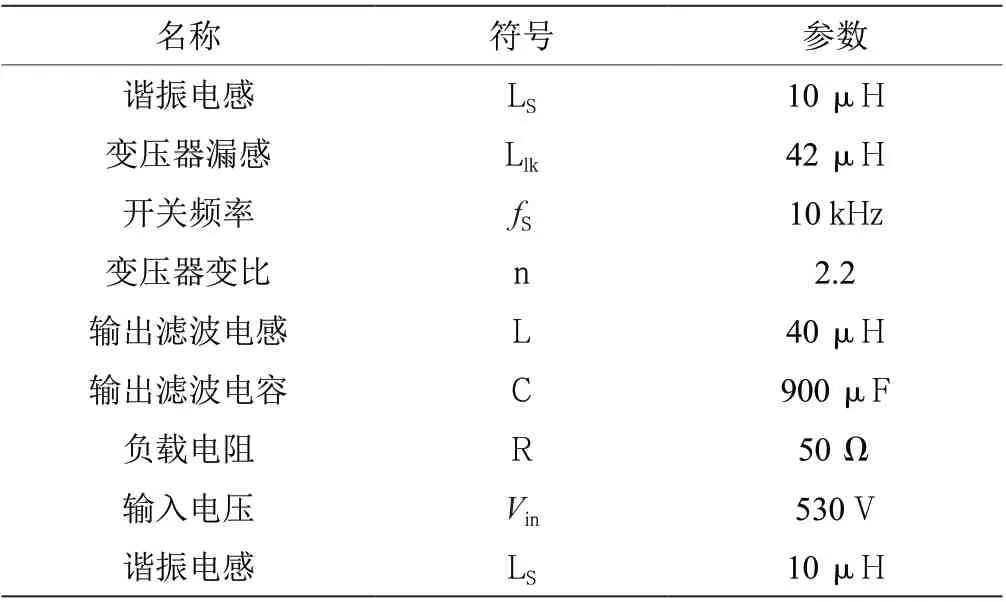
表1 瞬变电磁发射机参数表
根据表1 中的参数,可以得到发射机的传递函数如下:

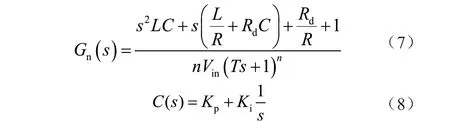
为保证滤波器的设计,可以使系统具有良好的抗干扰性能和较宽的频率范围[12]。令T=10-4,将各参数代入式(6)、式(7),得到滤波器传递函数Gf(s)及扰动观测器传递函数Gn(s):
根据发射机拓扑结构及观测器模型,搭建得到MATLAB/SIMULINK 模型,如图6 所示。
分别对瞬变电磁发射机拓扑采用电压反馈PI 闭环仿真和扰动观察器前馈控制仿真,其中一级逆变器开关频率为10 kHz,二级逆变器开关频率为1 Hz,二级母线电压为200 V,负载电阻为50 Ω,放大器增益系数K=8.5×10-4,比例系数Kp=1×10-2,积分系数Ki=3×10-4。仿真结果如图7 和图8 所示。
对比图7 和图8 仿真结果,二级逆变器截止期间,系统处于空载状态,一级逆变器以极低的占空比运行或者处于关闭状态,二级母线没有能量消耗和补充,处于静态平衡状态。当二级逆变器打开后,系统处于负载状态,由于PI 控制系统的滞后性,一级逆变器占空比并未及时增大到目标占空比,故二级逆变器打开前期二级母线滤波电容实际充当了电源的作用,系统能量消耗大于供给,电容电压降低。随着误差的累计和时间的延长,一级母线占空比逐渐增大,母线电压趋近稳定。当系统采用负载观测器前馈算法时,由于控制目标是确定的,在扰动出现后经过扰动观测器可以迅速计算出补偿量,并将补偿量反馈到输入端,提前对扰动进行补偿,避免其影响输出端。
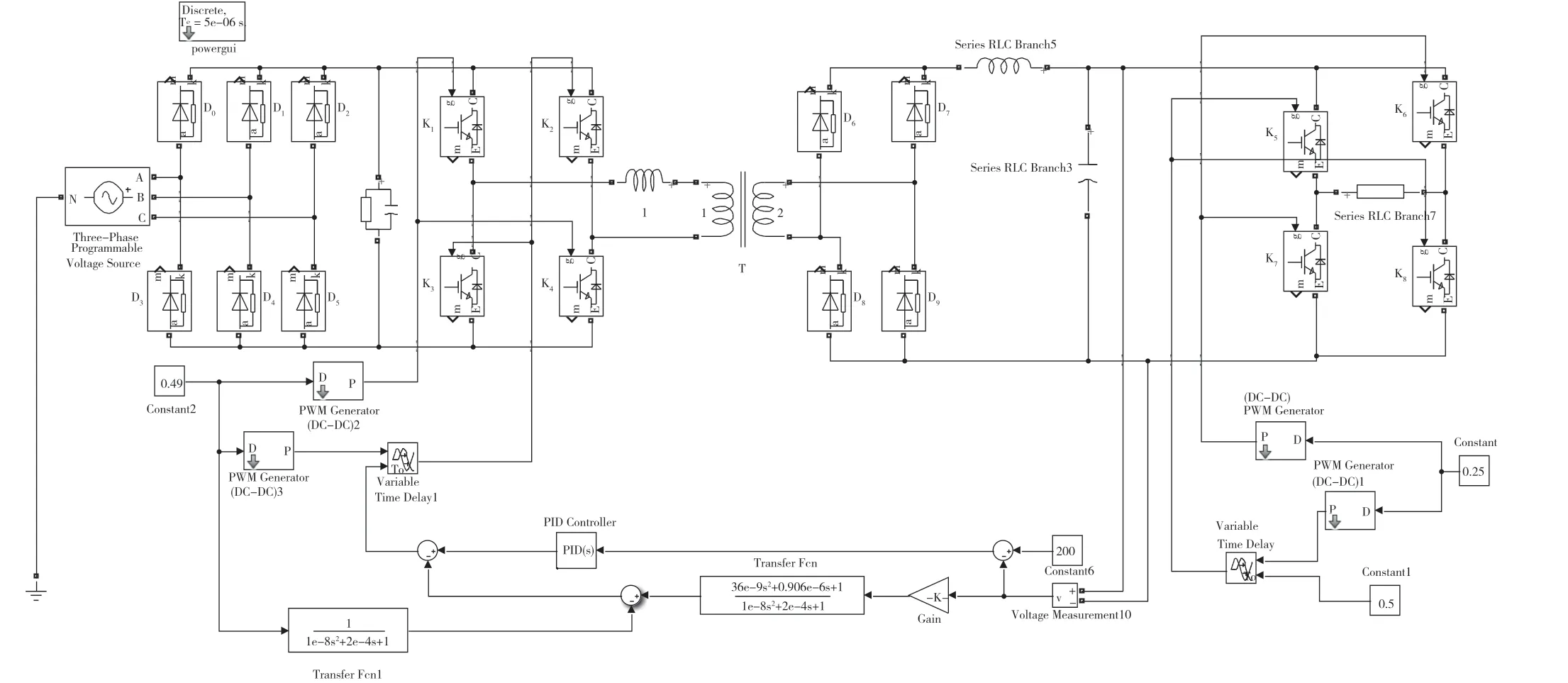
图6 MATLAB/SIMULINK 仿真模型
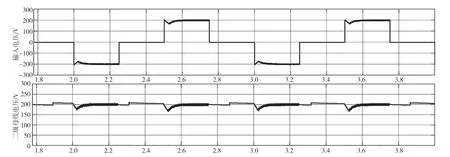
图7 电压反馈PI 闭环算法仿真结果
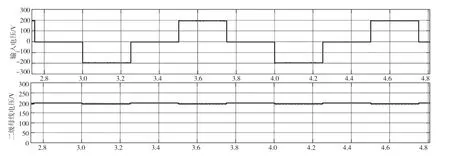
图8 基于扰动观测器前馈算法仿真结果
仿真结果显示,采用PI 反馈闭环控制算法,当系统出现扰动时电压跌落35.4 V,跌落时长为33.5 ms,恢复时间约为56 ms。采用扰动观测器前馈控制算法,系统出现基本电压跌落现象。仿真结果说明,相对于PI 反馈闭环控制算法,采用扰动观测器前馈控制算法具有更强的抗干扰性能和更快的跟踪能力。
4 扰动观测器前馈控制系统实验验证
采用DSP+FPGA 作为控制器验证该算法的可行性。DSP 采用TI 公司TMS320F28335,采用增强型哈弗结构,内部集成了PWM 外设模块,控制精度高,方式灵活,适合于一级逆变器的移相控制,主要用于二级母线电压的AD 采集、闭环PI 算法的实现和扰动观测器的实现。FPGA 采用EP2C5Q208C8,成本较低,灵活度高,用来作为二级变换器控制器,主要用于上位机通信和发射波形的实现。电压采样芯片采用ADI 公司的隔离性电压传感器AD202 kN,功耗低,精度高,频带宽,性价比较高。关键器件选型如表2 所示。
表2 关键器件选型
实验采用交流负载柜作为负载,发射电压170 V,发射频率1 Hz。实验结果如图9 和图10 所示。
图9 和图10 中,一通道为输出电压波形,三通道为二级母线电压波形。可知,采用母线电压PI 反馈控制算法时,若系统由空载状态切换为负载状态,其电压突减58 V 左右,下降时间约为5.33 ms,恢复时间约为30 ms。采用扰动观测器前馈算法时系统跟随性较好,基本没有出现二级母线电压的跌落。
5 结 论
良好的跟踪能力是瞬变电磁发射机稳定工作的基础,传统的电压闭环PID 控制法应用广泛,结构简单,但其响应速度和动态性能较差,只能够跟随变化比较缓慢的信号,当系统受到强扰动时,难以迅速跟随控制目标。基于扰动观测器的前馈控制是一种主动抗扰方式,可以明显提升系统的动态性能和抗干扰能力。本文建立了移相全桥变换器的数学模型,根据模型设计出扰动观测器进行前馈控制,最后通过仿真和实验验证了方法的有效性和可行性,对瞬变电磁发射机恒压控制算法的研究有一定的参考价值。
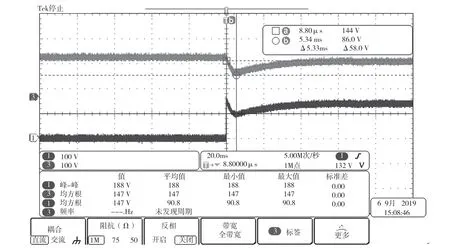
图9 电压反馈控制波形图
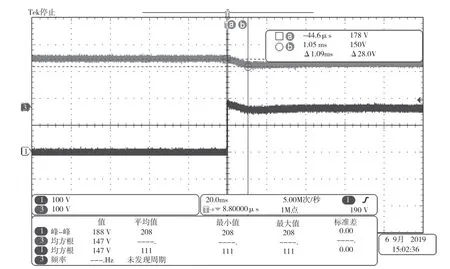
图10 扰动观测器前馈控制波形图
