基于离散元的蛆粪分离多维振动筛的设计与研究
2020-04-10蔡静周昕杨启志
蔡静 周昕 杨启志
摘要:利用固体畜禽粪便养殖蝇蛆不仅能够有效解决规模化畜禽养殖造成的环境污染问题,而且可以为畜禽养殖和水产养殖提供高蛋白饲料,但是如何将蝇蛆养殖业中蝇蛆和固体畜禽粪便培养基快速有效、机械、可控地分离是目前养殖户面临的难题。首先建立了蝇蛆和固体畜禽粪颗粒混合物离散元振动仿真模型,通过离散元方法分析蛆粪混合物筛分时透筛率的主要影响因素;其次对多维振动筛进行结构优化设计,并且对多维振动筛透筛率进行正交试验,最终确定并联振动筛最佳透筛率实现的条件。
关键词:离散元;蛆粪分离;多维振动筛;离散元;振动仿真模型;结构优化设计;透筛率
中图分类号: S817.5 文献标志码: A 文章编号:1002-1302(2020)03-0251-04
据不完全统计,我国由于规模化畜禽养殖和养殖小区建立而造成的固体畜禽粪便的年排放量已经超过了40亿t[1]。畜禽养殖造成的危害主要表现为:降低了养殖区范围内的水环境质量;对周边生活环境造成了严重影响;对养殖区周边的土壤环境造成重金属污染[2];对在该养殖区所在周边土地上种植的农产品质量安全造成影响[3]。
蝇蛆具有高蛋白营养成分[4-6],适用于水产以及畜禽养殖的蛋白饲料供给,目前利用固体畜禽粪便养殖蝇蛆不仅可以缓解环境污染问题,而且可以为我国畜禽养殖业提供急需的高蛋白饵料,经过养殖蝇蛆处理后残留的畜禽粪渣,不须要经过复杂处理就可以转化为有机肥料或者沼气原料。
利用畜禽粪便养殖蝇蛆没有得到快速发展的很大原因是缺少蝇蛆养殖生产链中成熟蝇蛆与畜禽粪培养基的快速可控分离技术,目前几乎全部为不可控的、利用蝇蛆生物学特性的、非机械式分离技术,分离效率低,无法实现大规模养殖生产[7-8]。利用振动筛来分离蝇蛆和固体畜禽粪(简称为“蛆粪”)是一种十分有效的方法,传统的振动筛大多为一维振动筛[9],筛分轨迹单一、效率不高,不能实现蛆粪的快速分离。而并联振动筛与传统的一维振动筛相比较而言,具有刚度大、结构紧凑、承载力强、工作空间小等优点[10-12],在进行物料的分选筛分作业时可以高效率地实现功能,所以利用并联振动筛来振动分离蛆粪混合物十分具有研究意义,并且直接影响畜禽粪养殖蝇蛆产业的发展。
1 离散颗粒动力学仿真
1.1 仿真颗粒模型建立
蝇蛆和固体畜禽粪便颗粒是潮湿颗粒,在实际振动过程中是经过碰撞后又能够迅速恢复自然形态的,因此本研究将蝇蛆和固体畜禽粪便颗粒设定为软球模型,结合实际工程应用和非线性阻尼思想,将蝇蛆和固体畜禽粪便颗粒的运动模型简化为弹簧阻尼运动,颗粒间的接触模型可以简化为图1。
物性试验测得了4日龄蝇蛆的基本物性参数,得到了蝇蛆的体长参数、大头直径参数、小头直径参数以及质量参数等,将测得的蝇蛆参数根据培养时的实际情况分别测定不同特征蝇蛆的占比,经过统计计算,将不同尺寸的蝇蛆区分为两类:(1)正常体积的蝇蛆,其大头直径为1.2 mm,小头直径为0.2 mm,蝇蛆体长为10 mm;(2)由于生长环境和其他内在因素影响,蝇蛆的尺寸略小于正常蝇蛆尺寸,其大头直径约为0.8 mm,小头直径为 0.05 mm;2类蝇蛆的数量比为 1 600 ∶ 80。固体畜禽粪便颗粒在测量时受到环境影响因素较高,故采取的是参考农业有机肥料的基本参数,将固体畜禽粪颗粒根据不同的尺寸分为3个类别,将固体畜禽粪便颗粒形状简化为球形,半径为0.5、0.8、1.0 mm,3种半径尺寸颗粒的比例为3 ∶ 3 ∶ 4。
由于蝇蛆在振动筛分过程中会发生形状变形,使得筛分效果不是很理想,因此可以对蝇蛆进行降温或者通过喷洒化学试剂使得蝇蛆在瞬间保持一定的状态不变,这样便于筛分处理。通过这样的工业应用分析,可以在离散元振动筛分过程中参考这样的实际工况,因此建立的三维仿真模型是固定不变的。
1.2 仿真
从力学角度出发,对蝇蛆和固体畜禽粪便颗粒在振动过程中产生的新位移以及新的位移和相关力的关系计算出新的相互作用力,重复计算过程,随时跟踪和记录蝇蛆和固体畜禽粪便颗粒在振动过程中的状态。
设定仿真分析颗粒总数为20 000颗,筛分效果评价指数以透筛率来进行评价,透筛率是筛分出去的固体畜禽粪颗粒总数与固体畜禽粪便颗粒的总数的比值,设定筛分的时间为3 s。可知在蝇蛆和固体畜禽粪颗粒的振动筛分仿真分析过程中,并不是振幅越大,筛分的效果就越佳。因为在实际筛分的过程中,振幅的变化范围是通过机械结构本身来决定的,存在一个临界值,过大或者过小的振幅都不利于获得最佳的振动筛分效果。
2 多维振动筛设计
2.1 整体结构设计
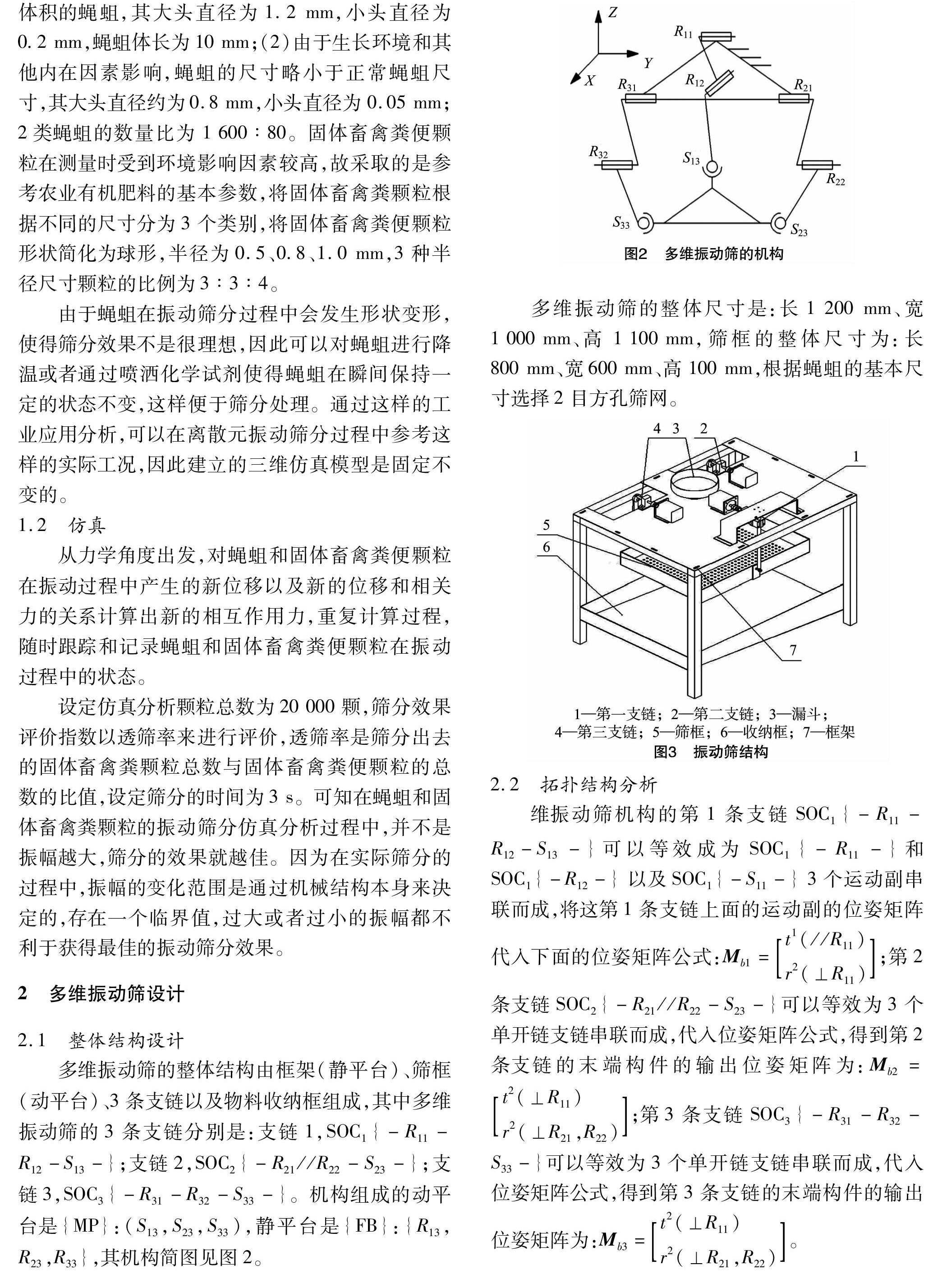
多维振动筛的整体结构由框架(静平台)、筛框(动平台)、3条支链以及物料收纳框组成,其中多维振动筛的3条支链分别是:支链1,SOC1{-R11-R12-S13-};支链2,SOC2{-R21//R22-S23-};支链3,SOC3{-R31-R32-S33-}。機构组成的动平台是{MP}:(S13,S23,S33),静平台是{FB}:{R13,R23,R33},其机构简图见图2。
多维振动筛的整体尺寸是:长1 200 mm、宽 1 000 mm、高 1 100 mm,筛框的整体尺寸为:长 800 mm、宽600 mm、高 100 mm,根据蝇蛆的基本尺寸选择2目方孔筛网。
2.2 拓扑结构分析
维振动筛机构的第1条支链SOC1{-R11-R12-S13-}可以等效成为SOC1{-R11-}和SOC1{-R12-} 以及SOC1{-S11-} 3个运动副串联而成,将这第1条支链上面的运动副的位姿矩阵代入下面的位姿矩阵公式:Mb1=t1(//R11)r2(⊥R11);第2条支链SOC2{-R21//R22-S23-}可以等效为3个单开链支链串联而成,代入位姿矩阵公式,得到第2条支链的末端构件的输出位姿矩阵为:Mb2=t2(⊥R11)r2(⊥R21,R22);第3条支链SOC3{-R31-R32-S33-}可以等效为3个单开链支链串联而成,代入位姿矩阵公式,得到第3条支链的末端构件的输出位姿矩阵为:Mb3=t2(⊥R11)r2(⊥R21,R22)。
将并联机构的3条支链的输出位姿矩阵Mb1、Mb2以及Mb3代入并联机构输出位姿矩阵方程的计算公式,可以得到:MPa=t1(//R11)
r2(//R21,R31)。由此可知,多维并联振动筛最终在动平台(筛框)实现的是2个转动和1个平移的运动方式。
2.3 工作空间分析
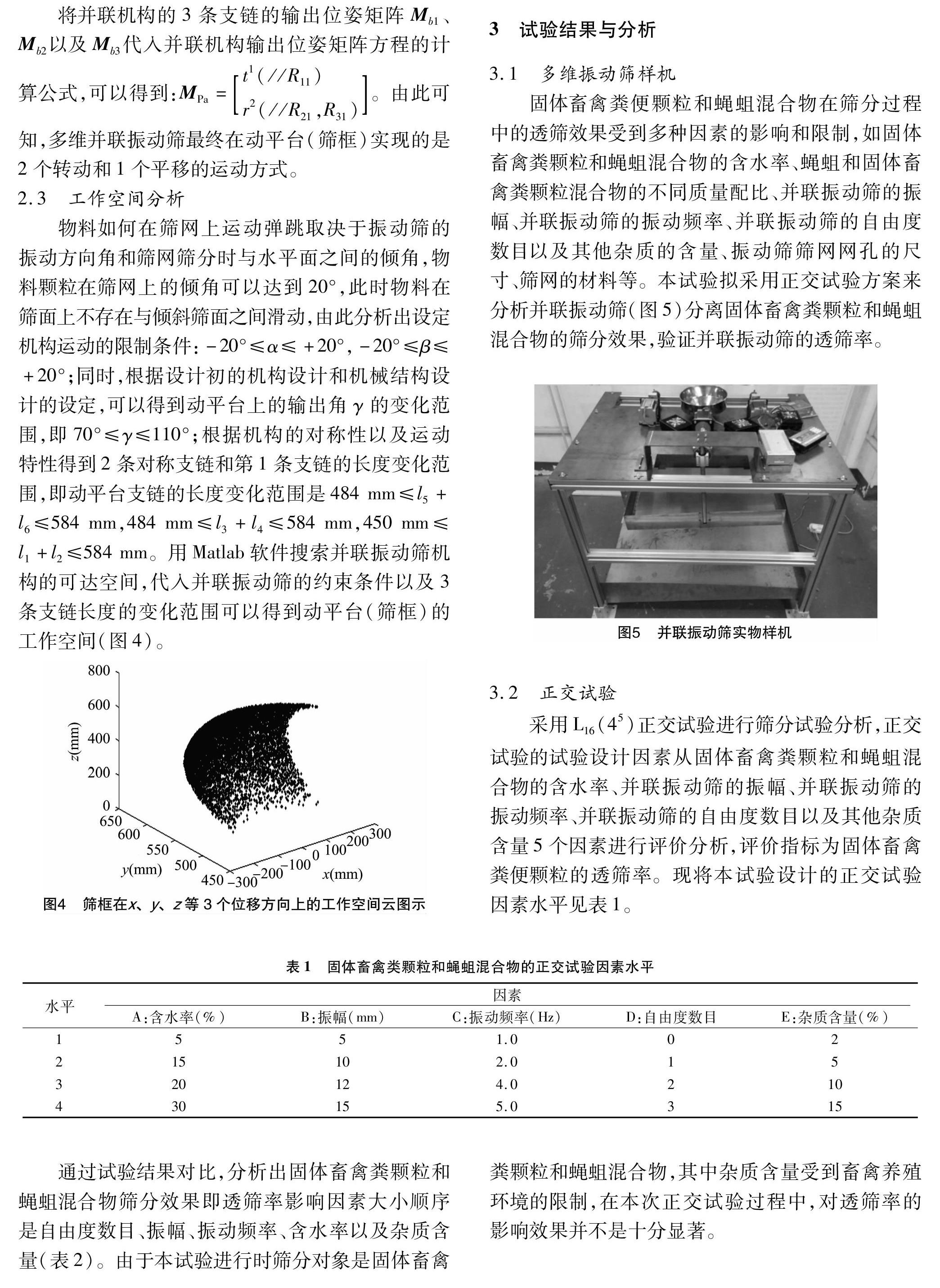
物料如何在筛网上运动弹跳取决于振动筛的振动方向角和筛网筛分时与水平面之间的倾角,物料颗粒在筛网上的倾角可以达到20°,此时物料在筛面上不存在与倾斜筛面之间滑动,由此分析出设定机构运动的限制条件:-20°≤α≤+20°,-20°≤β≤+20°;同时,根据设计初的机构设计和机械结构设计的设定,可以得到动平台上的输出角γ的变化范围,即 70°≤γ≤110°;根据机构的对称性以及運动特性得到2条对称支链和第1条支链的长度变化范围,即动平台支链的长度变化范围是484 mm≤l5+l6≤584 mm,484 mm≤l3+l4≤584 mm,450 mm≤l1+l2≤584 mm。用Matlab软件搜索并联振动筛机构的可达空间,代入并联振动筛的约束条件以及3条支链长度的变化范围可以得到动平台(筛框)的工作空间(图4)。
3 试验结果与分析
3.1 多维振动筛样机
固体畜禽粪便颗粒和蝇蛆混合物在筛分过程中的透筛效果受到多种因素的影响和限制,如固体畜禽粪颗粒和蝇蛆混合物的含水率、蝇蛆和固体畜禽粪颗粒混合物的不同质量配比、并联振动筛的振幅、并联振动筛的振动频率、并联振动筛的自由度数目以及其他杂质的含量、振动筛筛网网孔的尺寸、筛网的材料等。本试验拟采用正交试验方案来分析并联振动筛(图5)分离固体畜禽粪颗粒和蝇蛆混合物的筛分效果,验证并联振动筛的透筛率。
3.2 正交试验
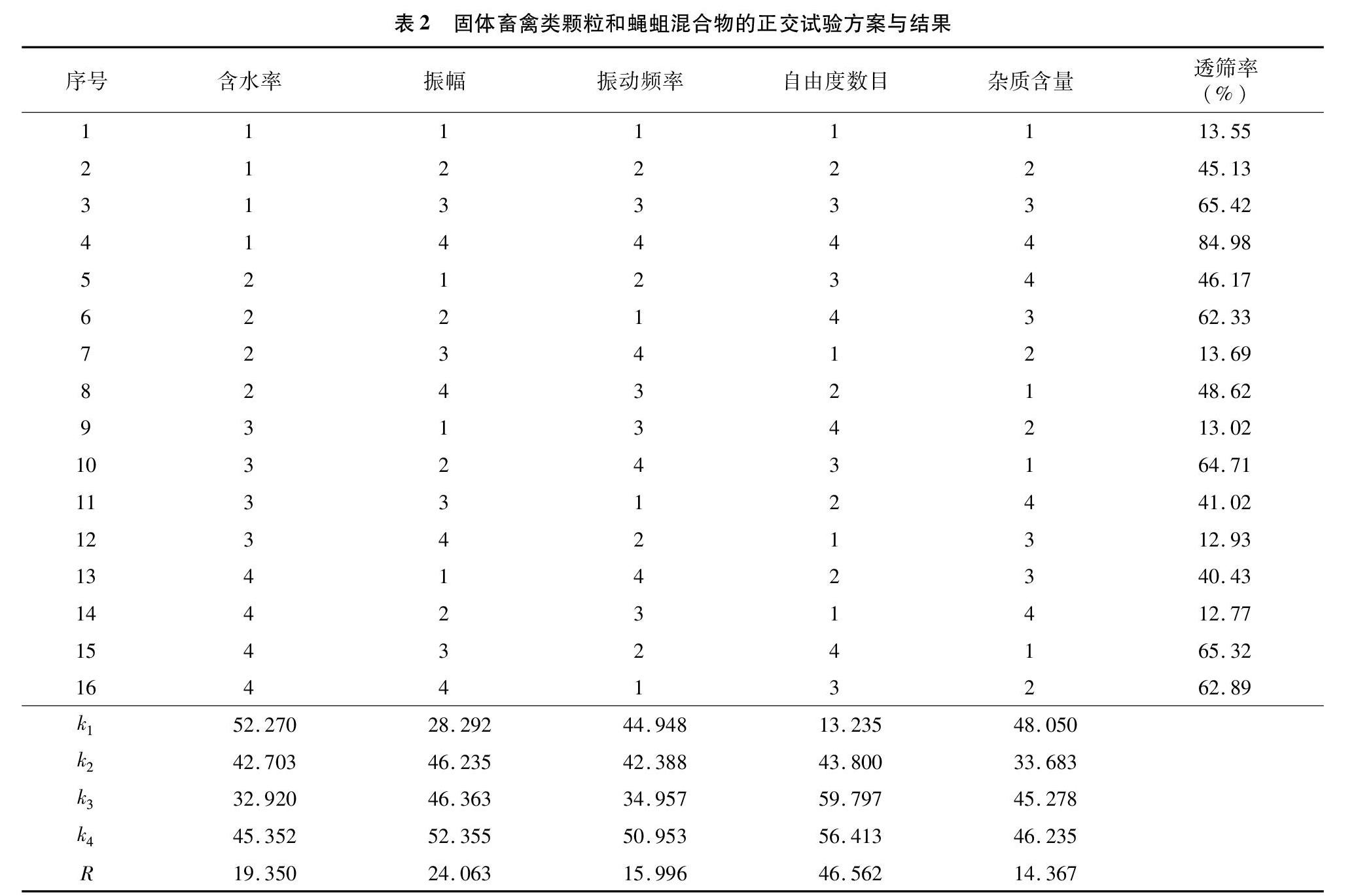
采用L16(45)正交试验进行筛分试验分析,正交试验的试验设计因素从固体畜禽粪颗粒和蝇蛆混合物的含水率、并联振动筛的振幅、并联振动筛的振动频率、并联振动筛的自由度数目以及其他杂质含量5个因素进行评价分析,评价指标为固体畜禽粪便颗粒的透筛率。现将本试验设计的正交试验因素水平见表1。
通过试验结果对比,分析出固体畜禽粪颗粒和蝇蛆混合物筛分效果即透筛率影响因素大小顺序是自由度数目、振幅、振动频率、含水率以及杂质含量(表2)。由于本试验进行时筛分对象是固体畜禽粪颗粒和蝇蛆混合物,其中杂质含量受到畜禽养殖环境的限制,在本次正交试验过程中,对透筛率的影响效果并不是十分显著。
4 结论
多维振动筛在振幅为15 mm、振动频率为5 Hz、含水率为5%、自由度数目为3、杂质含量为15%时,透筛能力最佳。多维振动筛可以单独驱动各个支链,根据实际需求分别对蛆粪混合物进行振动筛分,并且每个支链实现的筛分效果都不同。多维振动筛的筛分效率明显高于一维振动筛。
参考文献:
[1]Wang H,Dong Y,Yang Y,et al. Changes in heavy metal contents in animal feeds and manures in an intensive animal production region of China[J]. Journal of Environmental Sciences,2013,25(12):2435-2442.
[2]赵文峰,赵 峰,卢蓓蓓. 新型农村畜禽粪便综合处理利用工程技术研究[J]. 农业装备与车辆工程,2013,51(6):60-62,66.
[3]刘传会,陈志红. 蝇蛆蛋白营养成分及其饲用价值研究进展[J]. 南方农业学报,2012,43(5):705-709.
[4]陶亮亮,寇 庆,梁咪娟. 蝇蛆的营养价值及其应用于动物饲料研究进展[J]. 江西饲料,2011(6):20-23.
[5]王 芳,朱 芬,雷朝亮. 中国家蝇资源化利用研究进展[J]. 应用昆虫学报,2013,50(4):1149-1156.
[6]石爱民. 食用家蝇养殖与蛋白饮料的研究[D]. 保定:河北大学,2003:4-10.
[7]贾生福. 蝇蛆分离、加工和保存技术的试验[J]. 饲料研究,2007(7):36-37.
[8]朱廷美,吴 强,段俊红. 蝇蛆养殖分离装置设计及蝇蛆分离技术[J]. 农技服务,2008,25(8):88-89.
[9]李文成. 国内外筛分机械结构发展概况[J]. 石油化工设备技术,1985(2):14-19.
[10]张 帆. 一种新型并联运动振动筛及其运动学研究[C]. 中国农业工程学会学术年会,2011.
[11]马履中,林钰珍,杨文亮,等. 基于籽粒运动的多维振动筛分效率分析[J]. 农业机械学报,2009,40(10):62-66.
[12]王成军,李耀明,马履中,等. 3自由度混联振动筛设计[J]. 农业机械学报,2011,42(增刊1):69-73.
