温度对石墨烯膜光纤F-P声压传感器灵敏度影响研究
2020-04-10尹浩腾李成宋学锋樊尚春
尹浩腾,李成,2,宋学锋,樊尚春
(1.北京航空航天大学 仪器科学与光电工程学院,北京100191;2.深圳北航新兴产业技术研究院,广东 深圳518057;3.南方科技大学 创新创业学院,广东深圳518000)
0 引言
光纤F-P声压传感器具有抗电磁干扰、小型化、探测端无源、可远距离传输和高灵敏度的优点,近年来得到了广泛的研究[1]。石墨烯因其优异的机械力学特性、超薄厚度和高杨氏模量[2-3],有望成为一种理想的声压传感器振膜材料,使传感器具有高灵敏度和高带宽的应用特点。2013年中国香港理工大学Ma[3]等人使用多层石墨烯制作了F-P声压传感器,使振膜在1 Pa@10 kHz下实现了1.1 nm的中心挠度变形,即1.1 nm/Pa的机械灵敏度(单位压力变化导致的压敏膜片中心挠度变化)[4]。2019年美国坦普尔大学Qian等人分别使用石墨烯膜和石墨烯-银复合膜制作了F-P声压传感器,在0.5 ~10 kHz范围内实现1.55 nm/Pa和1.17 nm/Pa的机械灵敏度[5]。
在温度影响下,F-P声压传感器中各结构部件的材料均会发生不同程度的热膨胀,从而导致F-P腔长和悬浮薄膜预应力发生变化。其中,前者将导致传感器工作点发生漂移,进而导致光学灵敏度(单位腔长变化导致的光强变化)发生变化;后者则导致薄膜机械灵敏度的变化。为此,本文在分析温度对传感器响应特性影响的基础上,实验研究了温度对石墨烯膜光纤F-P声压传感器灵敏度的影响。
1 传感器的制备及工作原理
1.1 石墨烯膜F-P传感器的制备
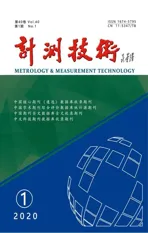
图1(a)示出了所制备的F-P传感器的结构示意图,包含单模光纤、氧化锆陶瓷插芯和石墨烯膜。其制作方法为:首先,使用酒精浴超声清洗,去除氧化锆陶瓷插芯的灰尘和杂质,将石墨烯膜裁剪至合适尺寸,并放入丙酮中,待PMMA保护层完全溶解后,使用插芯将悬浮的石墨烯膜捞出;之后,将端面吸附有石墨烯膜的插芯置于精密干燥箱,加热到40℃,保持1 h,则干燥后石墨烯膜受范德华力作用吸附于插芯端面;接下来,将制作好的探头固定在三维微动位移平台,将端面切割平整的单模光纤插入插芯尾部,并利用光谱仪确定F-P干涉腔的长度;最后,使用环氧树脂固定光纤,待胶完全固化后,即完成石墨烯膜F-P探头的制备。图1(b)示出了制备的石墨烯膜F-P传感器的实物图。
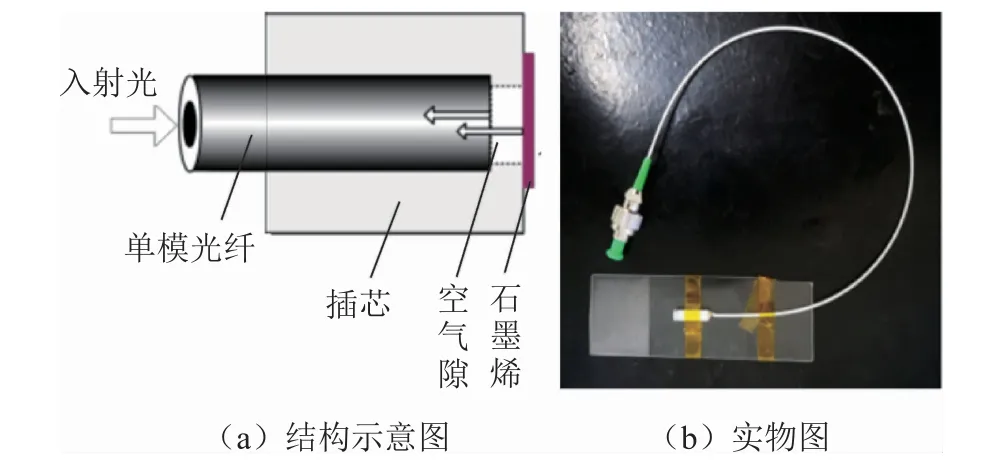
图1 F-P声压传感器
1.2 声压敏感机理
参考图1(a),石墨烯膜与光纤端面组成了F-P干涉腔的两个反射面。当外界声压作用于F-P干涉腔时,两侧的压力差使石墨烯膜产生挠度形变,从而改变F-P腔长,通过强度解调可得到腔长变化,实现声压测量。在双光束干涉近似条件下,传感器的输出电压的交流分量Vac与声压引起的石墨烯膜挠度(即腔长变化)ΔL的关系可表示为

式中:R 为光电转换系数;I0为光源功率;So为光学灵敏度。So可表示为

式中:Ir为反射光强;λ为光源波长;R1,R2分别为光纤端面与石墨烯反射面的反射率;ξ是腔长损耗率;L为F-P干涉腔长度。当光源波长λ一定时,光学灵敏度So是腔长L的周期函数;当λ和L满足式(3)的条件时,So取得最大值。对于已知腔长的F-P传感器,为取得最大的光学灵敏度值,可选择的光源波长点不止一个,这些波长点也即该F-P声压传感器的正交工作点。

1.3 温度对机械灵敏度的影响
根据Beams模型[7],当周边固支圆膜片在预应力σ拉伸下受均布压力时,其中心挠度ω与施加压力p之间满足关系:

式中:E为圆膜片弹性模量;t为圆膜片厚度;υ为泊松比;r为圆膜片半径。根据Campbell模型[8],当预应力较大时,膜片中心挠度随均布压力呈线性变化,如式(5)所示。

由此,薄膜的机械灵敏度可表示为式(6),即单位压力载荷引起的薄膜中心挠度为

由于石墨烯膜中心挠度ω即为腔长变化,根据式(1)和(6),可得传感器的电压灵敏度(单位压力变化导致的传感器电压输出变化)为

当F-P结构发生温度变化时,由于石墨烯膜和氧化锆插芯基底分别具有负、正的热膨胀系数[10],两者之间的热变形差异使石墨烯膜承受热应力的作用。对于悬浮石墨烯膜,其预应力可表示为

式中:σ0为初始预应力;σth为热应力。其中,初始预应力产生的原因主要是石墨烯膜受基底的吸附作用以及薄膜转移过程中所形成的应力;热应力则主要是由于薄膜与基底之间不同的热膨胀系数而引起,其可表示为

式中:Ef,υf,αf分别表示石墨烯薄膜的杨氏弹性模量、泊松比和热膨胀系数;αs为陶瓷插芯基底的热膨胀系数;ΔT为温度的改变量。
本文中,10层石墨烯膜的Ef,υf和αf分别取1 TPa,0.17[9]和-8×10-6K-1[10];陶瓷插芯基底的热膨胀系数αs取1×10-6K-1[10],则由式(9)可知,当温度从25℃下降至13℃时,相应的石墨烯膜内热应力会增加0.13 GPa。
2 温度影响实验与分析
2.1 声压测试平台
图2为声压测试实验平台的结构示意图。在消音箱内,将制备的F-P声压传感器和参比传声器MP201(标称灵敏度为50.7 mV/Pa)置于扬声器轴线的对称位置。由可调谐激光器激发窄带激光,通过环形器进入F-P腔,反射光经环形器馈入光电探测器(DC-200 kHz光电探测器的转换系数为107V/W),通过送入示波器进行显示和存储。
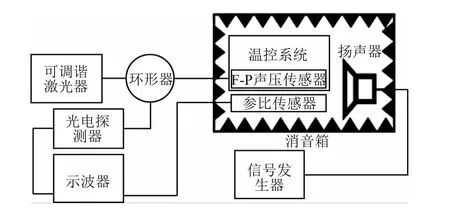
图2 声压测试实验平台结构示意图
2.2 F-P传感器温度影响实验
在无声压激励条件下,首先对F-P结构的温度敏感性进行了测试。以0.2℃为间隔,从25℃降温至13℃,再逐渐升温至25℃。在每一种温度状态下,使用分辨力为0.01 nm的光谱仪对F-P结构的反射光谱进行测量,通过光谱解调可求得不同温度下F-P腔的长度,如图3所示。
图3 腔长随温度的变化关系
实验结果表明,在13~25℃范围内腔长与温度存在较强的线性关系,且温度越低,腔长越短;而且,降温过程中腔长-温度的耦合关系可拟合为-37.4 nm/℃。这主要是由于陶瓷插芯、光纤和环氧树脂在低温下收缩,从而导致腔长变短。参考图4中光谱A,调控前测得探头温度25℃,根据测得的F-P腔反射光谱,将可调谐激光器的波长设置为1556 nm,功率设置为-19.3 dBm,此时传感器具有最大光学灵敏度。使用扬声器在1 kHz处产生0.9 Pa的稳定声压,以0.2℃为间隔,从25℃降温至13℃,之后再恢复至25℃,此过程中传感器响应如图5所示。因温度引起F-P腔长度变化,传感器响应近似呈周期性变化。而当腔长发生单调线性变化时,F-P声压传感器的光学灵敏度将发生周期性变化。在图5中a~g各点处,曲线分别取得最大响应,这些点对应的反射光谱A~G如图4所示。即,当使用波长为1556 nm的检测光进行强度解调时,a~g各点都位于正交的工作点上。
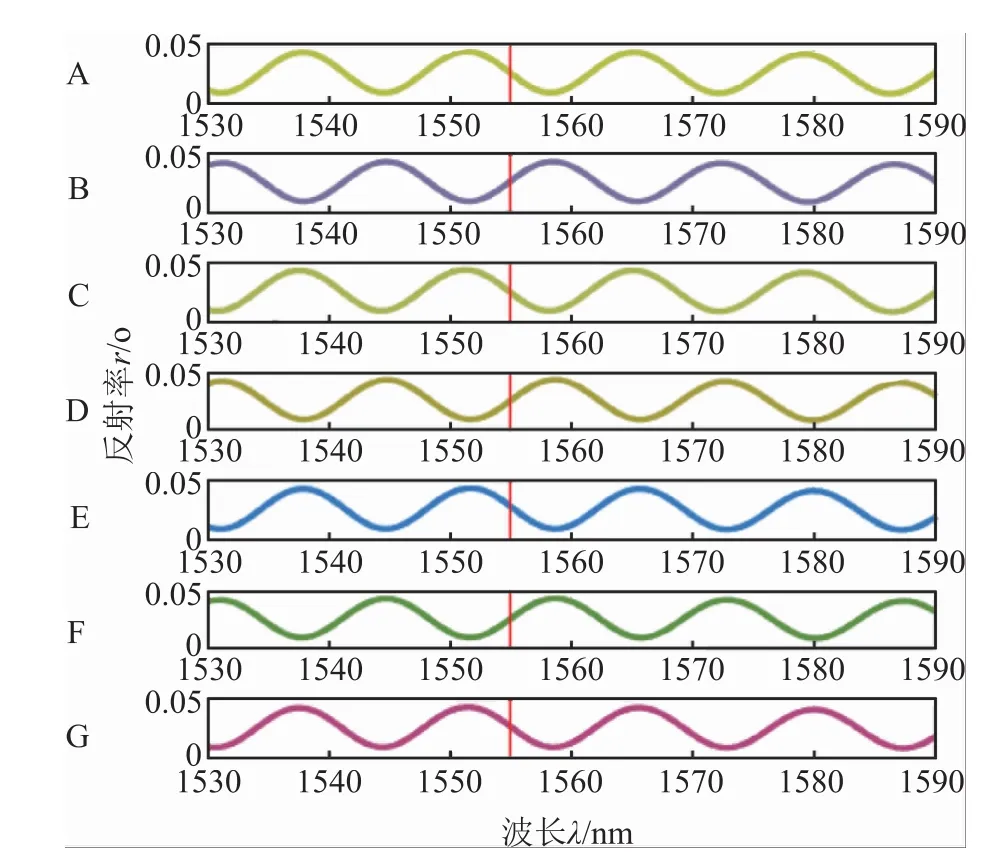
图4 正交点外的反射光谱
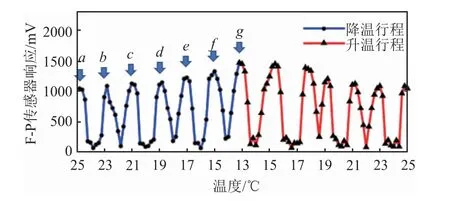
图5 1 kHz下不同温度时声压响应
为评估温度对传感器机械灵敏度的影响,测试在不同温度下传感器的声压响应,如图6所示。由此可知,传感器的声压响应具有明显的线性特性。将光纤端面反射率R1=2.54%、10层石墨烯膜反射率R2=1.49%和腔长损耗系数0.2代入式(1)和(5),则可确定不同温度下因薄膜热应力改变而导致的F-P传感器的机械灵敏度和薄膜预应力的变化趋势,如图7所示。
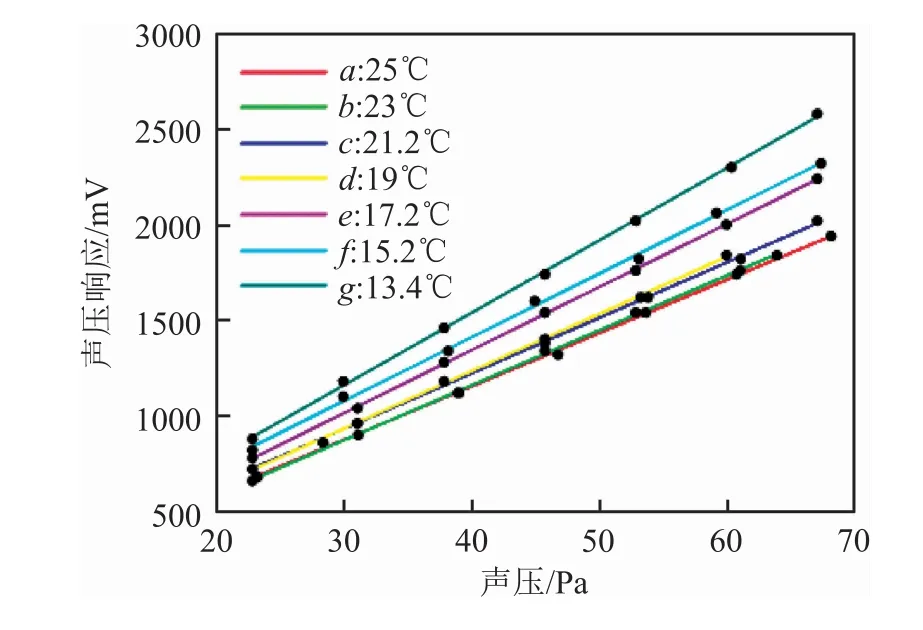
图6 降温行程中正交工作点处声压响应
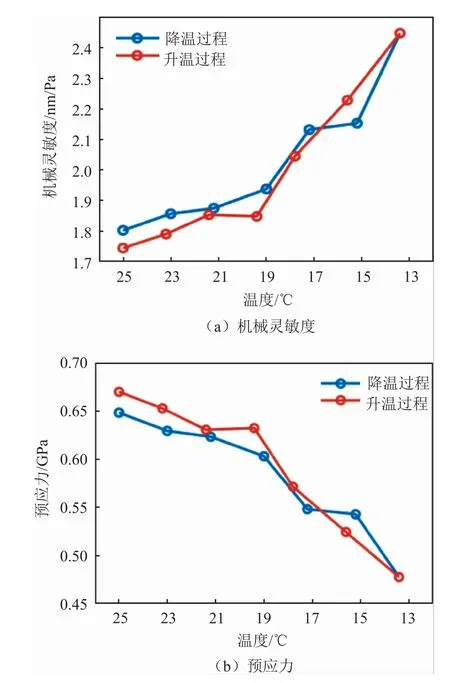
图7 热应力对机械灵敏度和预应力的影响
实验结果表明,适当降温可减小悬浮石墨烯膜的预应力,使其从0.67 GPa降至0.48 GPa,由此相应地将传感器振膜的机械零灵敏度从初始的1.80 nm/Pa提高到2.44 nm/Pa。借助式(9),则引发上述预应力主要变化的悬浮石墨烯膜热应力的变化量约为0.19 GPa。
3 结论
设计和制作了可进行薄膜热应力调控的石墨烯光纤F-P声压传感器组件,搭建了基于半导体制冷片(实验调节范围为13~25℃)的温度调节系统,在1 kHz下进行了不同温度的声压测试。实验结果表明:随着温度的降低,石墨烯膜预应力逐渐下降;相应地,传感器机械灵敏度从初始条件下的1.80 nm/Pa增加至2.44 nm/Pa(增幅约35.6%);随着实验温度的降低,受材料热变形的影响,F-P腔长逐渐减小,进而造成传感器的光学灵敏度出现近似周期性变化,即限制这种强度解调型膜片式F-P声压传感器的电压输出响应范围。为此,针对上述的温度耦合影响问题,通过减小F-P传感器敏感结构的温度不匹配系数,结合干涉信号解调算法的优化,开展融温度抑制的应力调控式石墨烯膜F-P声压传感器增敏的深入研究具有重要的实际意义和应用价值。