基于ROS的无人派件机器人设计
2020-04-09林宏伟陈琪媚曾仕峰曾启正陈涛邱斯杰黄奕秋孙海升林杰刘宇亮
林宏伟 陈琪媚 曾仕峰 曾启正 陈涛 邱斯杰 黄奕秋 孙海升 林杰 刘宇亮


摘 要:针对校园快递人工派送存在的安全问题,设计一款基于ROS的无人派件机器人。此机器人采用调用ROS机器人开源操作系统的模块功能包的方式和人工远程监控的方式实现了无人派送快件的目的。通过测试机器人的路线规划较好地实现了预期目标,完成了派件机器人自动规划路线,实现了派件机器人自动控制。此机器人结构设计合理,安全性高,可操作性强,可大规模投入生产和使用,有广泛的应用前景和潜在的市场价值。
关键词:ROS机器人;校园快递;无人派送;规划路线;自动控制;远程监控
中图分类号:TP242.6文献标识码:A文章编号:2095-1302(2020)03-00-02
0 引 言
随着电商、零售等业态发展,我国单日快递量过亿的情况已常态化,尤其是校园地带,传统的投递方式越来越难以满足日益增长的服务需求,同时适龄劳动力人口下降及人工成本配送难的现状加速了业务环节的自动化和无人化。在校园派件既要保证派件速度也要保证派件过程的安全,针对校园快递人工派送存在的安全问题,本文设计了一款基于ROS的无人派件机器人,车载雷达实时扫描、更新派件环境情况,主控控制四轮双排全向轮底盘灵活移动,再结合网络摄像头,准确规避障碍物,使其精确导航至目的地。路线导航规划基本实现无人化配送,这种配送模式提升了物流网点与终端之间的流转效率,也是快递行业进步的需要。
1 无人派件机器人整体设计
本无人派件机器人工作流程如图1所示。快递员在服务端操作上位机,监控派件情况和操作机器人派件,用户通过手机APP查看物流以及操作延迟收货或者确认收货,机器人接收服务端和用户端指令后开始工作,并且显示基本路线图在机器人显示屏上。本无人派件机器人包括软件应用层和硬件控制层。软件应用层包括用户APP和服务端上位机;硬件控制层包括硬件系统和机器人结构。
2 硬件控制层
2.1 硬件系统设计
如图2所示,无人派件机器人分为操作部分、驱动部分、识别部分和显示部分。主控机STM32安装有Linux系统,在Linux系统上搭建ROS机器人开源操作系统,主控机负责的任务有:接收PC端和APP端发送过来的指令;执行雷达建图和导航算法;配合IMU惯性测量单元驱动编码器电机;搭配HDMI显示屏显示数据。
2.1.1 识别部分
识别部分是由SLAM雷达和摄像头模块组成,主要是识别地图。此机器人搭载的SLAM激光雷达扫描半径为
40 m,扫描范围大。SLAM激光雷达的作用是建立地图模型,结合里程计进行导航和自主规划路线。此机器人采用了基于SLAM激光雷达和里程计的Gmapping算法,实现了自动导航和自主规划路线的目标。Gmapping算法根据SLAM激光雷达扫描获取到的地图数据和里程计提供的信息,对地图进行构建,并且可以估计机器人的位置信息。Gmapping信息流向图如图3所示。输入端的/td和/tf_static为坐标变换的数据,即里程计的信息,输入端的/scan为雷达扫描的数据;输出端的/map是雷达构建出来的地图模型,/map_matedata为地图模型的信息。即通过给机器人输入里程计信息和雷达扫描的信息,结合Gmapping算法输出构建的地图模型以及地图模型的相关信息。
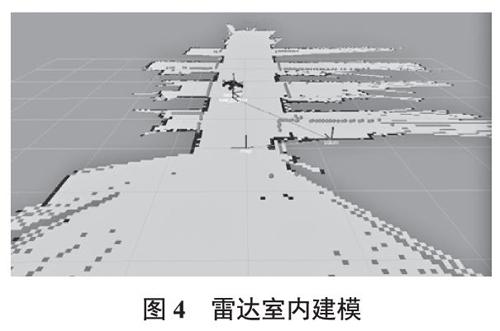
以室内为例,利用SLAM激光雷达建立的地图模型图效果如图4所示。该机器人建立的模型地图是一张灰度图像,图中黑色代表着障碍物,灰色代表着未知区域,白色代表着可行区域。在机器人建立地图模型的时候,可以通过RVIZ观察到地图慢慢建立的过程。此机器人构建的地图信息是导航和自动规划路线必不可少的。机器人自动导航是基于已经建立完成的地图模型,以建立完成的地图模型为判断基础,与检测的地图模型进行匹配对比,若两个地图存在不同点则判断有障碍。
摄像头的作用是扫描障碍。在此派件机器人上搭建网络摄像头,该摄像头用于识别动态物体,对于移动较快的物体,雷达的反馈比较慢。故采用“雷达+摄像头”识别模式,雷达主要负责地图模型建立以及模型匹配,摄像头负责识别动态物体。摄像头识别动态物体是基于帧数差算法,即摄像头识别前后的图像帧数,先将图像二值化后,再通过图像的帧数检测动态物体。
2.1.2 驱动部分
此无人派件机器人是选用带编码器的直流电机作为驱动电机,选用GY-85九轴IMU传感器作为该无人机器人的惯性测量模组。利用GY-85传感器实时获取机器人的运动姿态,并且将机器人的姿态数据通过串口发送到STM32主控机,STM32驱动编码器,调整每个电机的运动速度。
2.2 机器结构设计
2.2.1 整体结构设计
整体结构设计如图5所示。无人派件机器人顶部的识别单元将收集到的信息传到底部的移动单元,进而精准移动到目的地,并在与用户交互满足取件条件后从中间的储物单元中取件。在满足车身强度要求下,选择不易生锈的铝合金板作为移动单元的车体底盘,同时铝合金板还具有密度低、价格低廉等特性。其中储物单元为已有方案的快递柜替换而成,其大小高度可变化,外部的支撑架选用碳纤维骨架作为主要支架,具备质量轻、硬度大的特点。
2.2.2 底盘机械设计
全向轮的材料为尼龙耗材,载重量可达到20 kg,双排全向轮除了可以绕轮毂转动外,小滚轮也可以绕其自身的轮轴转动,使其轻松实现任意方向的自由运动,此外全向轮无需润滑或现场维护,其安装选项非常简单和稳定,而双板的全向轮具有滚筒之间没有死区的优势。
在全向轮与车体连接处增加一个减震系统。减震系统是由弹簧和减震器共同组成,减震器抑制弹簧吸震后反弹时的震荡,并且吸收车轮与路面冲击产生的能量,弹簧起缓和冲击的作用。底盘由四个双排全向轮以中心对称结构分布在车身底端,每个轮轴上配有一个减震系统,其结构如图6所示。全方位移动结构可以利用车轮本身具有的定位和定向功能,实现可在二维平面上从当前位置向任意方向运动而不需要改变姿态车体,在许多需要精确定位和高精度轨迹跟踪时,还可以对自身的位置进行调整。
3 结 语
针对校园快递人工派送存在的安全问题,本文设计一款基于ROS的无人派件机器人。在此机器人主控上搭建ROS操作系统以及结合激光雷达和Opencv算法,实现无人派送快件的目的。通过室内测试机器人的路线规划较好地实现了预期目标,完成了派件机器人自动规划路线,实现了派件机器人自动控制。此机器人结构设计合理,安全性高,可操作性强,有利于大规模生产和使用,应用前景广泛。
参 考 文 献
[1]勒国庆,班乾乾.基于STM32的智能小車设计[J].福建电脑,2018,34(7):123-125.
[2]吕闪,金巳婷,沈巍.基于STM32的循迹避障智能小车的设计
[J].计算机与数字工程,2017,45(3):549-552.
[3]王楠,查志敏.基于STM32单片机的智能搬运小车设计[J].大庆师范学院学报,2017,37(6):14-17.
[4]林智骅,平雪良,金登峰,等.基于STM32的全方位移动平台设计和控制[J].电子测量技术,2016,39(1):19-21.
[5]陈劭,郭宇翔,高天啸,等.移动机器人RGB-D视觉SLAM算法
[J].农业机械学报,2018,49(10):38-45.
[6]洪亮. 基于深度相机的移动机器人SLAM算法研究[D].成都:中国科学院大学,2018.
[7]郑灿涛. 基于激光雷达的室内移动机器人自主导航与行人跟踪研究[D].广州:华南理工大学,2018.
[8]王旒军,陈家斌,余欢,等.RGB-D SLAM综述[J].导航定位与授
时,2017,4(6):9-18.
[9]唐梓敖,石皓宇,邓涵文.模块化嵌入式人工智能软件的开发[J].电子技术与软件工程,2019(9):49.
[10]谢萌,张世武,李旺,等.基于ROS的远程车辆控制和目标跟随系统设计[J].工业控制计算机,2019(7):29-31.
[11]曾启正,陈涛,曾仕峰,等.基于云控制的智能派件系统设计
[J].物联网技术,2019,9(6):106-108.