基于碰撞圆的船舶避碰决策模型及仿真
2020-04-09张计峰胡勤友廖秉军
张计峰 胡勤友 廖秉军


摘要:为在船舶避碰决策过程中兼顾全面评估和高效决策两个重要的因素,通过引入可能碰撞圆(possible circle of collision,PCC)概念,提出一种基于碰撞圆的避碰决策模型。碰撞圆是由两船速度共同确定的所有可能发生碰撞的位置的集合,具有“穷举性”,可实现全面分析的效果。利用仿真平台对船舶发生碰撞与不发生碰撞案例进行分析,总结碰撞圆的静态特性和动态特性及其相互关系,进而建立基于静态特性的可能碰撞点(possible point of collision,PPC)分布模型。采用该模型对“桑吉”号事故场景进行实例验证并将其可视化,结果表明该模型可有效评估碰撞风险,并可快速作出避碰决策。
关键词: 可能碰撞圆(PCC); 可能碰撞点(PPC); PPC分布模型; 避碰决策
中图分类号: U675.96 文献标志码: A
Abstract: In order to take into account the two important factors of comprehensive evaluation and efficient decision-making in the decision-making process of ship collision avoidance, a collision avoidance decision-making model based on the collision circle is proposed by introducing the concept of the possible circle of collision (PCC). The collision circle is a collection of all possible collision positions determined by the two ships velocities, which is “exhaustive” and can achieve the effect of comprehensive analysis. The simulation platform is used to conduct analysis on collision cases and non-collision cases of ships, summarize the static and dynamic characteristics of the collision circle and their relationships, and then establish the distribution model possible points of collision (PPC) based on the static characteristics. The model is used to verify the accident scene of “SANCHI” and visualize it. The results show that the model can evaluate collision risk effectively and make collision avoidance decision fast.
Key words: possible circle of collision (PCC); possible point of collision (PPC); PPC distribution model; collision avoidance decision-making
0 引 言
隨着世界经济的快速发展,船舶数量急剧增加,水上交通日益繁忙,造成船舶碰撞事故频繁发生。80%以上船舶碰撞事故是由人的因素引起的[1]。国内外相关学者在船舶避碰方面做了大量的研究并取得了一定的进展。学者们还提出预报与识别碰撞危险区的方法[2-3]、船舶动态转向模型法[4]、船舶自动避碰模型法[5-7]来实现船舶的有效避碰。此外,廖秉军[8]提出了安全态势图的相关概念及基本用法;胡甚平[9]提出船舶会遇过程中避碰阶段的划分与量化,为船舶碰撞责任划分和船舶操纵行动提供参考;随着人工智能技术的不断成熟与完善,人工蚁群算法[10]、遗传算法[11]、粒子群算法[12]等被用于优化船舶避让的转向时机、安全避让角度、复航时间和复航角度。学者们还利用智能算法和模型各自的优势,将船舶避碰领域理论、船舶动界理论、船舶运动数学模型、领域模型与各种智能算法相结合[13-17],建立了船舶自动避碰优化模型。上述研究虽然利用相关的智能算法提出了避碰方案,但未能全面分析所采取的措施对局面产生的影响,也未能直观展现各种避碰方案的避碰效果。
碰撞圆模型是由两船的航速和位置共同确定的,充分理清碰撞圆的分布规律对船舶避碰评估的全面性和决策效率提升很大。本文通过对可能碰撞圆(possible circle of collision,PCC)与可能碰撞点(possible point of collision,PPC)的静态分布和动态发展规律进行分析,归纳总结PCC与PPC的静态分布和动态变化规律,建立基于碰撞圆的船舶避碰决策模型并将其可视化,将模型应用于“桑吉”号事故场景中,验证模型的可靠性。
1 碰撞圆原理及相关概念
1.1 阿氏圆定义
1.2 碰撞圆定义
碰撞圆是阿氏圆在避碰中的具体运用。A船和B船到点P的距离分别为s1和s2,s1/s2=k,令s1为A船在一定时间t内航行的距离,s2为B船在同一时间t内航行的距离,则将s=vt代入s1/s2=k可得A船与B船的速度之比vA/vB=k,距离的定比问题也就转换成了速度的定比问题。
通过静态分析与动态仿真测试,可总结出如下规律:
(1)对碰撞圆和碰撞点进行可视化,容易观察碰撞点的分布情况,可直观判断两船是否存在碰撞风险。
(2)根据动态发展规律判断两船是否发生碰撞,不发生碰撞时具有如下发展规律:两船PPC位于船位连线的两侧,快船航向线切割碰撞圆弧度变小,脱离并远离碰撞圆的过程是PCC及其动态变化的必经过程。
(3)利用静态分析并使两船PPC合理分布可促使动态变化向有利方向发展,而不合理分布使动态变化向不利方向发展,因此在两船的速度和位置已知的条件下,可视化的静态分析可用于全面评估碰撞风险、快速作出避碰决策。
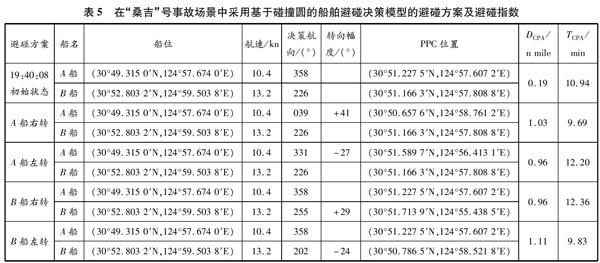
3 基于碰撞圆的船舶避碰决策模型仿真验证 将“桑吉”号船(A)与“长峰水晶”号船(B)碰撞发生前10 min时两船的数据作为初始状态录入仿真平台,以1 n mile为半径作PPC分布模型,得出避碰决策方案,并比较避碰效果。在“桑吉”号事故场景中采用基于碰撞圆的船舶避碰决策模型的避碰决策仿真见图11。决策避碰方案及避碰效果见表5,其中DCPA和TCPA分别为最近会遇距离和最短会遇时间。
结合《国际海上避碰规则》,两船均应选择右转方案,利用基于碰撞圆的船舶避碰决策模型能快速计算出船舶的转向幅度,通过可视化能全面清晰地展示PPC的分布情况,两船避碰决策方案为表5所示的A船右转和B船右转方案。
4 结 论
利用碰撞圆模型具有很好地适应航速、航向、位置变化的优势,应用基于碰撞圆的船舶避碰决策模型进行风险评估和避碰并将其进行可视化,一定程度上解决了对船舶进行全面评估和避碰决策效果差的问题。采用碰撞圆模型在“桑吉”号事故场景下进行实例仿真验证,结果表明所得避碰方案满足《国际海上避碰规则》和安全需求,证明该模型具有可行性,是一种直观、高效的避碰决策方法。可能碰撞点(PPC)分布模型在不同的会遇局面下有不同的几何关系,几何模型参数设置主要依靠主观经验,如何灵活选取合适的模型和完善几何参数的设置需要进一步研究。
参考文献:
[1] 黄颖, 李丽娜, 陈国权. 紧迫危险避碰决策支持模块设计及其应用[J]. 集美大学学报(自然科学版), 2011, 16(6): 434-439. DOI: 10.19715/j.jmuzr.2011.06.007.
[2] 吴兆麟. 基于PAD信息选择避碰行动与改进PAD图形[J]. 大连海运学院学报, 1986, 12(4): 12-22. DOI: 10.16411/j.cnki.issn1006-7736.1986.04.002.
[3] 方祥麟, 傅万煊. 速比圆预报危险区模型及其在ARPA系统中的应用[J]. 中国航海, 1984(2): 26-38.
[4] 王仁强, 赵月林, 谢宝峰. 船舶动态转向避碰行动数学模型[J]. 大连海事大学学报, 2014, 40(1): 17-20. DOI: 10.16411/j.cnki.issn1006-7736.2014.01.023.
[5] 贺益雄, 黃立文, 牟军敏, 等. 交叉相遇局面让路船自动避碰行动方案[J]. 哈尔滨工程大学学报, 2015, 36(8): 1024-1029. DOI: 10.3969/j.jssn.1006-7043.201409047.
[6] 熊勇, 贺益雄, 黄立文. 基于速度障碍的多船自动避碰控制方法[J]. 中国航海, 2015, 38(3): 46-51.
[7] 陈姚节, 李爽, 范桓, 等. 基于速度矢量坐标系的多船自动避碰研究[J]. 计算机仿真, 2015, 32(6): 420-424.
[8] 廖秉军. 安全态势图避让法简介[J]. 航海技术, 2018(4): 24-27.
[9] 胡甚平. 船舶会遇过程中避碰阶段的划分与量化[J]. 中国航海, 2001(2): 83-87.
[10] 马文耀, 吴兆麟, 杨家轩, 等. 人工鱼群算法的避碰路径规划决策支持[J]. 中国航海, 2014, 37(3): 63-67.
[11] 倪生科, 刘正江, 蔡垚, 等. 基于遗传算法的船舶避碰决策辅助[J]. 上海海事大学学报, 2017, 38(1): 12-15. DOI: 10.13340/j.jsmu.2017.01.003.
[12] 王得燕, 刘以安. 粒子群算法在多船避碰决策中的应用[J]. 计算机工程与设计, 2009, 30(14): 3380-3382. DOI: 10.16208/j.issn1000-7024.2009.14.061
[13] HUANG Yamin, VAN GELDER P H A J M, WEN Yuanqiao. Velocity obstacle algorithms for collision prevention at sea[J]. Ocean Engineering, 2018, 151: 308-321.
[14] 刘仁伟, 薛彦卓, 刘旸, 等. 受限水域中船舶自动避碰模型及应用[J]. 哈尔滨工业大学学报, 2018, 50(3): 171-184. DOI: 10.11918/ j.Issn.0367-6234.201609064.
[15] 李丽娜, 熊振南, 高岩松, 等. 单船避碰智能决策的生成与优化方法[J]. 信息与控制, 2002(2): 49-51.
[16] LAZAROWSKA A. Ships trajectory planning for collision avoidance at sea based on ant colony optimisation[J]. Journal of Navigation, 2015, 68(2): 291-307. DOI: 10.1017/S0373463314000708.
[17] LAZAROWSKA A. Ant colony optimization based navigational decision support system [J]. Procedia Computer Science, 2014, 35: 1013-1022. DOI: 10.1016/j.procs.2014.08.187.
(编辑 贾裙平)
