沿海远距离施工实时水位控制测量方法
2020-04-09李炜
李 炜
(中交广州航道局有限公司,广东 广州 510290)
沿海远距离航道疏浚工程施工区域因离海岸较远,潮位站稀少且超出岸边潮位站有效控制范围,无法通过常规方法获得有效的潮位观测值,而传统依托岸站的解决方案已不能满足远距离疏浚区域的潮位实时控制需求。RTK(real time kinematic)测量水位因通讯距离受限,无法适用于远距离实时水位控制[1-3];在海上设立临时水位站(修建验潮站、抛压力式验潮仪)、精密单点定位技术PPP(precise point positioning)或让载波相位后处理技术PPK(post processing kinematic)须事后数据处理才能获取水位数据,适用于水深测量中的水位观测,却无法满足施工实时水位的需求[4];基于余水位订正的潮位推算需要海上定点水位站30 d以上的历史水位数据[5],投入时间长、成本高、计算复杂。为此,笔者对航道疏浚远距离施工实时水位控制测量的方法进行研究。
1 沿海远距离施工实时水位控制测量方法工作原理
1.1 星站差分技术
星站差分GPS属于广域差分GPS范畴。目前应用比较广泛的星站差分系统有3种,分别是Navcom公司的StarFireTM系统、Fugro公司的OminiSTAR系统以及Subcea7公司的Veripos系统[6]。本文以“中国精度”为代表进行说明。
“中国精度”是我国第一个全球星基增强服务系统,于2015年6月15日正式在全球发布并提供服务(图1)。它使GNSS用户在无须架设基站的情况下,在全球任意地点任意时刻获得基于WGS84椭球的厘米级的高精度定位增强服务。
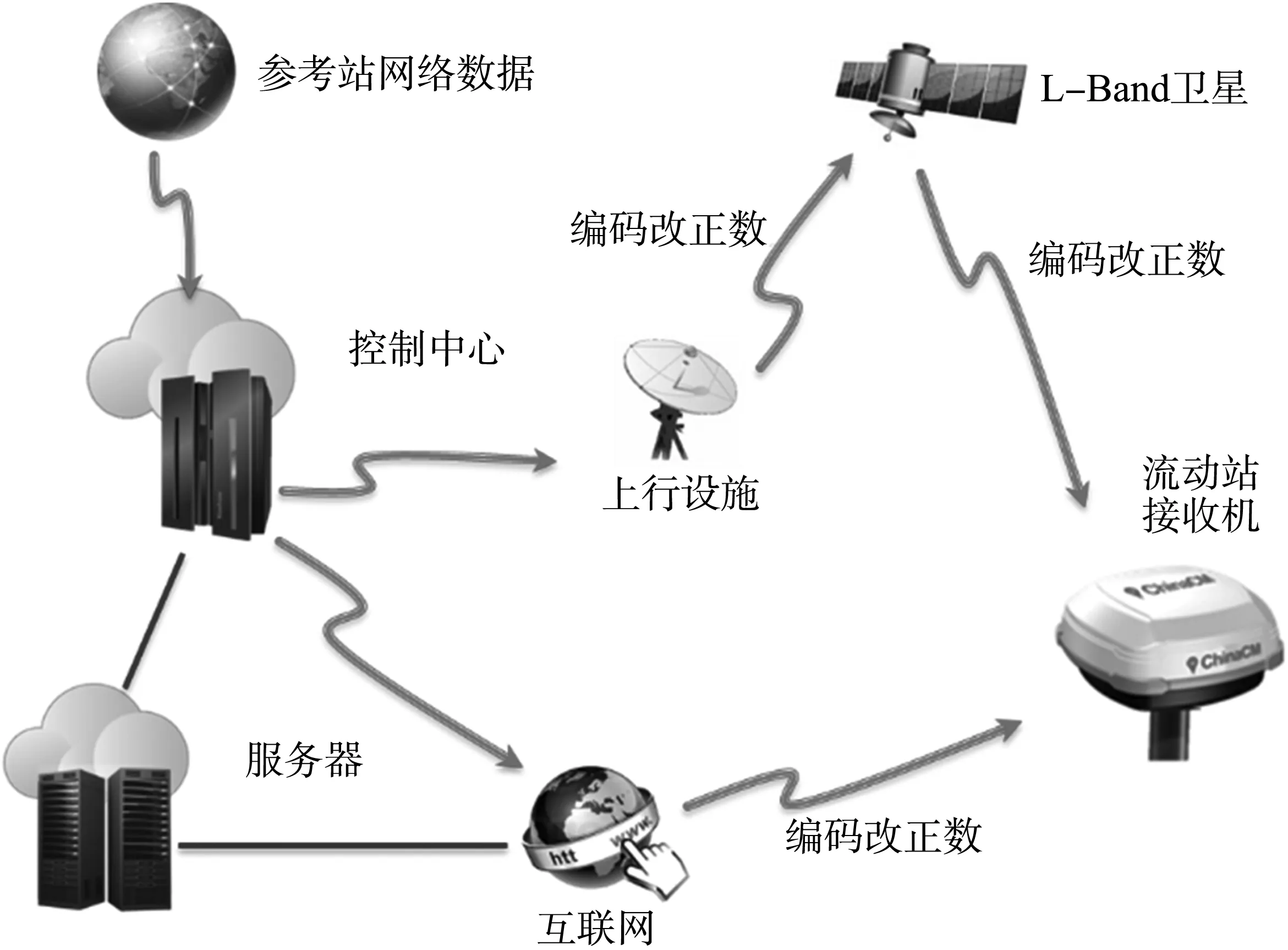
图1 星站差分“中国精度”工作原理
1.2 EGM 2008地球重力场模型
EGM 2008是美国国家地理空间情报局开放的全球超高阶地球重力场模型。任意地面点的高程异常均可以由地球重力场模型求出,利用精密的地球重力场模型能以较高的精度将GNSS技术测定的大地高采用某种函数模型或方法对剩余残差进行拟合,进而求得正常高或高差。章传银等[7]的研究成果表明,EGM2008 模型的高程异常全球精度为13 cm,在我国大陆总体精度为20 cm,华东、华中地区为12 cm,华北地区为9 cm,西部地区为24 cm。
1.3 远距离实时水位观测原理
图2显示实时水位观测原理。安装在施工船舶的星站差分GPS实时获取基于WGS84的高精度大地高,通过EGM 2008模型精确计算船舶位置的高程异常值,进而计算获得星站差分GPS接收机位置的正常高;实时获取船舶吸口深度传感器数据,换算星站差分GPS接收机到水面的距离,计算出水面高程:
T=H-(A-B)-(N-K)
(1)
其中:T为水位;H为星站差分GPS接收机的大地高;A为星站差分GPS接收机到船舶吸口传感器的垂直距离,为固定值,可从船舶尺寸图中查阅获得;B为船舶吸口传感器到水面的深度,由吸口深度传感器测定;N为参考椭球面到似大地水准面的距离,通过EGM 2008计算获得;K为似大地水准面到海图基准面的距离。
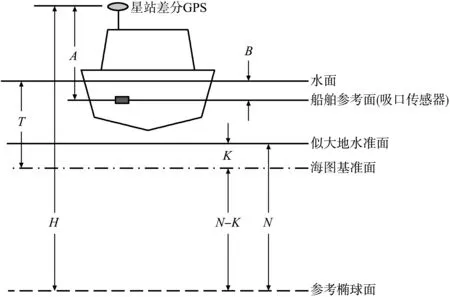
图2 实时水位观测原理
2 沿海远距离施工实时水位控制测量方法的应用
连云港港30万吨级航道二期工程航道疏浚施工项目LYG-302-H1.3标段,施工区航道区段近端离岸约25 km,远端离岸约52 km。项目投入的施工船舶为大型自航耙吸式挖泥船,破土能力强、施工效率高,实时获取准确的水位数据指导船舶施工尤为重要。若耙吸式挖泥船无法准确得知基于深度基准面的下耙深度,将直接导致垄沟出现和超挖产生施工废方,既影响疏浚施工质量又减少经济效益。而现有水位控制方法存在两类问题:一是获取的水位不能准确反映施工船舶所在位置的实际水位值,二是获取的水位值不能实时传输到施工船舶。但远距离施工实时水位控制测量方法,不仅可以准确测量施工船舶所在位置的实时水位,而且可以自动传输至DTPM(船舶施工导航系统),且已成功应用于连云港港施工的3条“浚海”系列万方耙吸船。
2.1 安装
耙吸船挖深控制原理:耙头实时开挖深度=泥泵吸口深度+耙头至泥泵吸口的垂直距离-实时水位。为减小实时水位测量误差,选择在耙吸船泥泵吸口附近安装星站差分接收机。该位置距离施工导航系统电脑(位于船舶驾驶室)约100 m,采用网线电源一体线,网线作为RS232串口数据传输电缆,电源线作为星站差分接收机供电线。
2.2 数据采集与处理
通过编程,从串口实时获取星站差分GGA数据并进行坐标转换,根据实时解算的船舶位置进行高程异常改正;同时,软件通过网络自动获取船舶吸口深度传感器值。数据采集与处理流程见图3。高程异常改正可以通过布尔莎模型坐标转换或预定义高程异常模型,而预定义高程异常模型可以采用编译好的可执行程序Altrans EGM2008 Calculator进行计算[8]。因我国法定高程系统为正常高,与EGM2008重力场模型存在系统偏差,所以须通过已知控制点(包括大地高及正常高)修正。
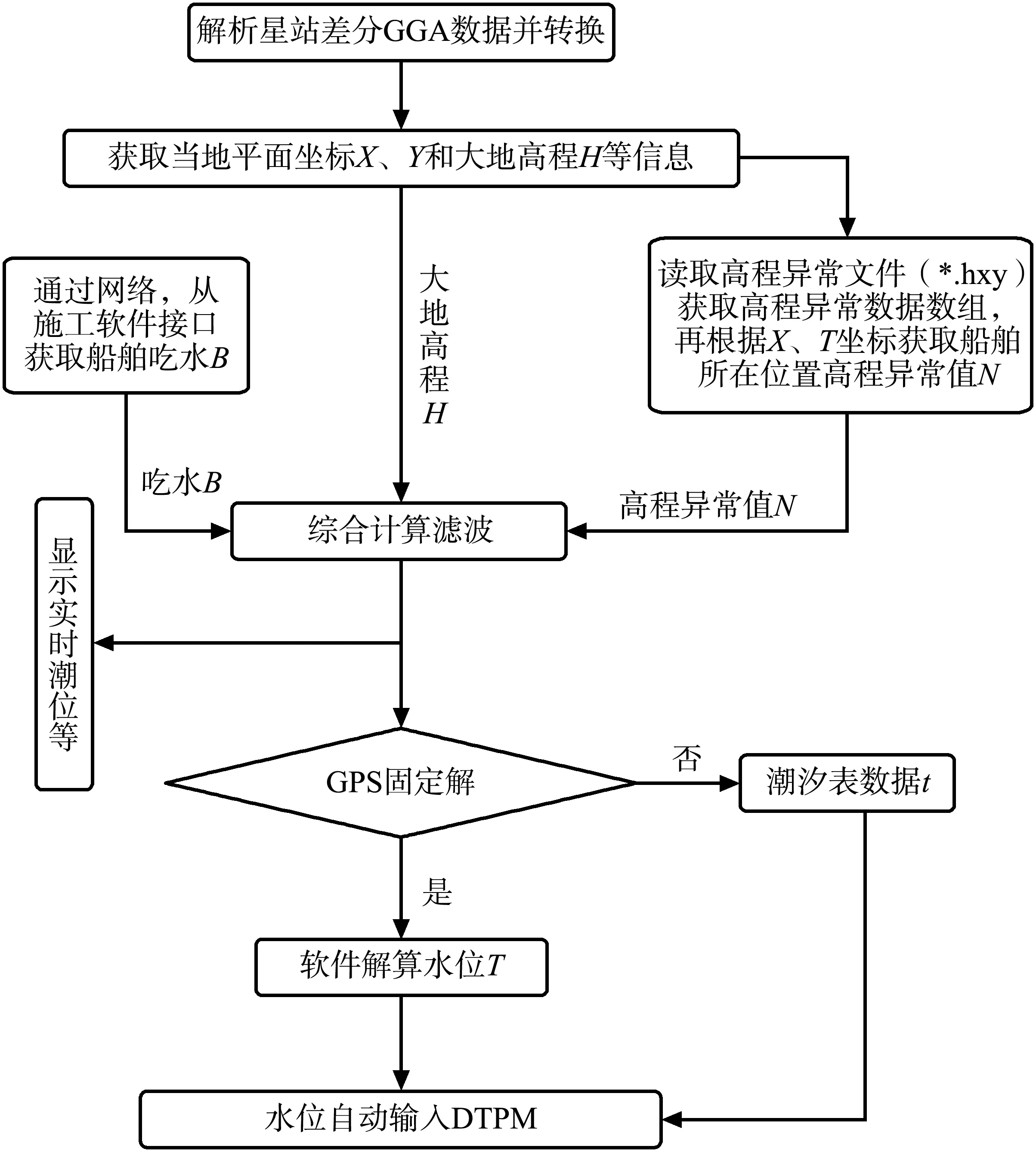
图3 数据采集与处理流程
3 沿海远距离施工实时水位控制测量方法精度分析
精度分析分为星站差分接收机高程精度分析和实时水位精度分析。星站差分接收机选用UniString G10A,实时水位精度分析选用在连云港港施工的耙吸船“浚海5”。
3.1 星站差分接收机高程精度分析
为了检验星站差分接收机高程测量精度,2019年5月7—8日进行了24 h数据采集,采样频率为1 Hz,共87 452条记录。本次试验将星站差分接收机安置在已知控制点上,计算实测高程与已知高程(大地高)的差值,对差值进行分析统计,结果见表1。差值最大值为0.181 m,最小值为-0.209 m,平均值为0.013 m,中误差为0.067 m,小于±0.10 m的占83.88%,小于±0.15 m的占98.26%,小于±0.20 m的占99.99%。
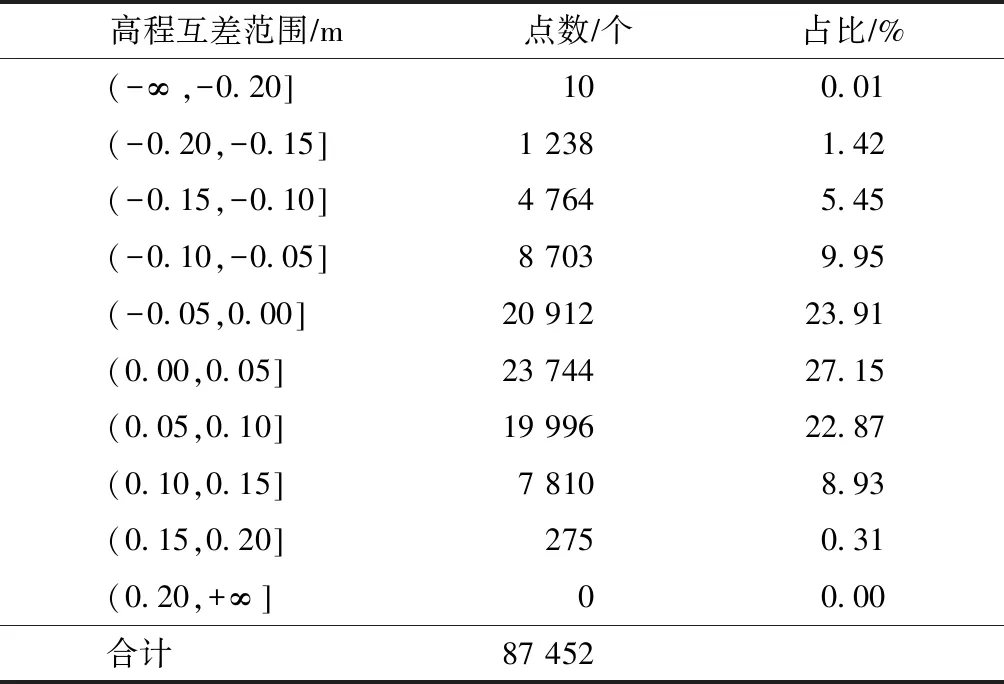
表1 星站差分高程差值分析
为提高星站差分接收机高程测量精度,对实测高程进行移动平均滤波,按60个数据(1 min)进行滤波。将经滤波后的实测高程与已知高程(大地高)进行差值分析统计,结果见表2。差值最大值为0.154 m,最小值为-0.187 m,平均值为0.013 m,中误差为0.066 m,小于±0.10 m的占84.61%,小于±0.15 m的占99.00%,小于±0.20 m的占100.00%。测试结果表明,“中国精度”完全满足其标称的高程精度10~15 cm。
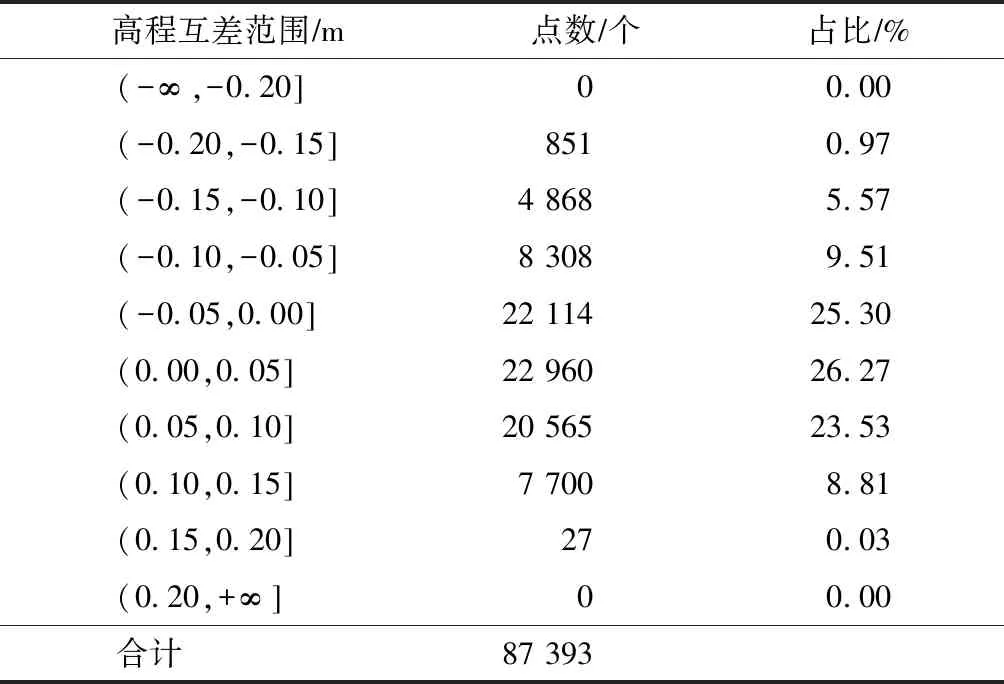
表2 星站差分高程差值滤波分析
3.2 实时水位精度分析
为了检验远距离施工实时水位控制测量精度,于2019年2月10日、2019年2月16日和2019年2月22日进行数据采集,包括PPK潮位和施工船舶实时水位,其变化曲线见图4。
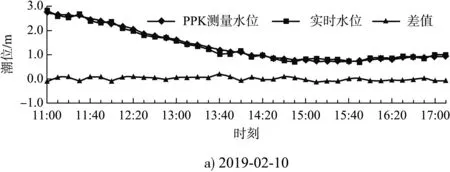
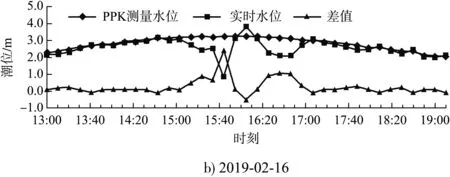
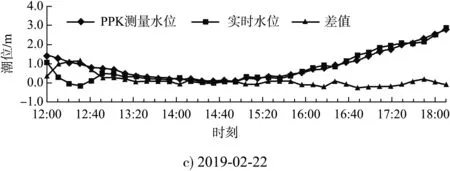
图4 实时水位与PPK潮位比较
部分连续时段差值明显偏大(大于0.5 m),其余时段施工实时水位与PPK测量水位的变化趋势基本一致,各时间点的数据基本重合。经分析,施工实时水位与PPK测量水位存在明显差异的时间段(2019-02-16T15:10—16:50与2019-02-22T12:00—12:40),“浚海5”船舶往返倾废区进行抛泥作业时,航速10 kn以上,吸口深度传感器采用侧装测量管连接,测量的压力值变化不能准确反映水面变化,施工实时水位误差较大。
在分析实时水位与PPK潮位之间的差值变化的基础上,统计分析水位差值(不考虑船舶抛泥作业),见表3。差值最大不超过0.28 m,最小不低于-0.24 m,中误差最大为0.142 m,平均差值最大为0.078 m,差值小于0.10 m的占81.25%,差值小于0.20 m的占95.83%,差值小于0.30 m的占100.00%。可见,实时水位精度满足现行《水运工程测量规范》中水位观测要求:推算订正水位与历史观测水位之差80%不大于0.10 m,95%不大于0.20 m,100%不大于0.30 m;沿海远距离施工实时水位控制测量方法可行。

表3 实时水位与PPK潮位的偏差
4 结语
1)星站差分测量技术无须架设基准站,高程测量中误差优于10 cm,最大偏差小于20 cm;通过移动平均滤波可以显著提高星站差分高程测量精度,但实时水位控制测量中不能无限增大滤波采样个数;星站差分测量技术成功应用于施工水位控制测量。
2)船舶挖泥施工时航速2~3 kn,施工实时水位测量中误差优于15 cm,最大偏差小于30 cm,满足现行《水运工程测量规范》和疏浚施工要求。
3)远距离施工实时水位控制测量方法未考虑和消除船舶姿态引起的误差。在船舶装载不平衡引起姿态变化星站差分接收机安装高度距离吸口16 m,水位误差约0.24 m。
4)远距离施工实时水位控制测量方法解决了远距离施工实时准确获取水位的难题。研究成果不仅适用于沿海远距离施工实时水位控制,而且适用于近海、沿海及远海施工实时水位控制;不仅适用于自航耙吸式挖泥船施工实时水位控制,而且适用于各类施工船舶施工实时水位控制。研究成果为航道疏浚施工远距离实时水位控制提供了一种经济、有效的方法,该技术经济效益和社会效益显著,具有较好的应用前景。
