DCM船施工管理系统
2020-04-07冼嘉和吴晓锋
冼嘉和,吴晓锋,王 冲
(中交第四航务工程局有限公司 广州510290)
0 引言
DCM 法是二战后美国一家公司率先研制并在陆上使用的加固地基方法。20 世纪50 年代日本引进后,经过20年改进发展,20世纪70年代初开始用于海上地基处理,目前在日本、芬兰、北欧等地已广泛应用于海上工程[1,2]。中国于1977年从日本引进水泥搅拌法加固软基技术,起始主要应用于陆上软基处理。1987 年第一次将此技术应用于天津港东突堤南北侧码头的接岸结构海上软基处理工程之中[3]。工程实践证明,水下深层水泥搅拌法能在短时间内让软土地基获得所需的地基强度,具有地基变形小、施工无污染等诸多优点[4]。但是早期的DCM 船舶主要依靠人工操作,信息化程度不高[5]。随着工业自动化技术以及计算机技术的发展,急需开发一种自动化甚至智能化的施工管理系统,解决DCM 施工过程中灌浆自动化程度低、人工操作误差大、发现处理问题不及时等问题[6-8]。
1 船舶概况
“四航固基”为中交四航局研制的水上DCM 船,船长72 m,型宽30 m,型深4.8 m。为满足工程需要,减小船舶吃水,选择方形平底结构,设计平均吃水仅2.9 m,船舶尾部设置3 层甲板室。该船设置3台大功率DCM 处理机位于船艏,桩基施工间距可在3.2~6.0 m范围内调节,每台大功率DCM处理机由4根正方形布置的搅拌轴组成,直径为1.3 m,每次处理平面面积为4.64 m2,水面下处理深度-38 m,能够进行手动、半自动和自动化3 种操作。该船舶还具有自动调载系统,保证了船舶在一定的风浪条件下能够平稳作业。同时,该船舶能够自动接收GPS 信号,实现精准定位,并且在钻进施工过程中可以自动调整桩体垂直度。船舶结构及设备组成如图1所示。
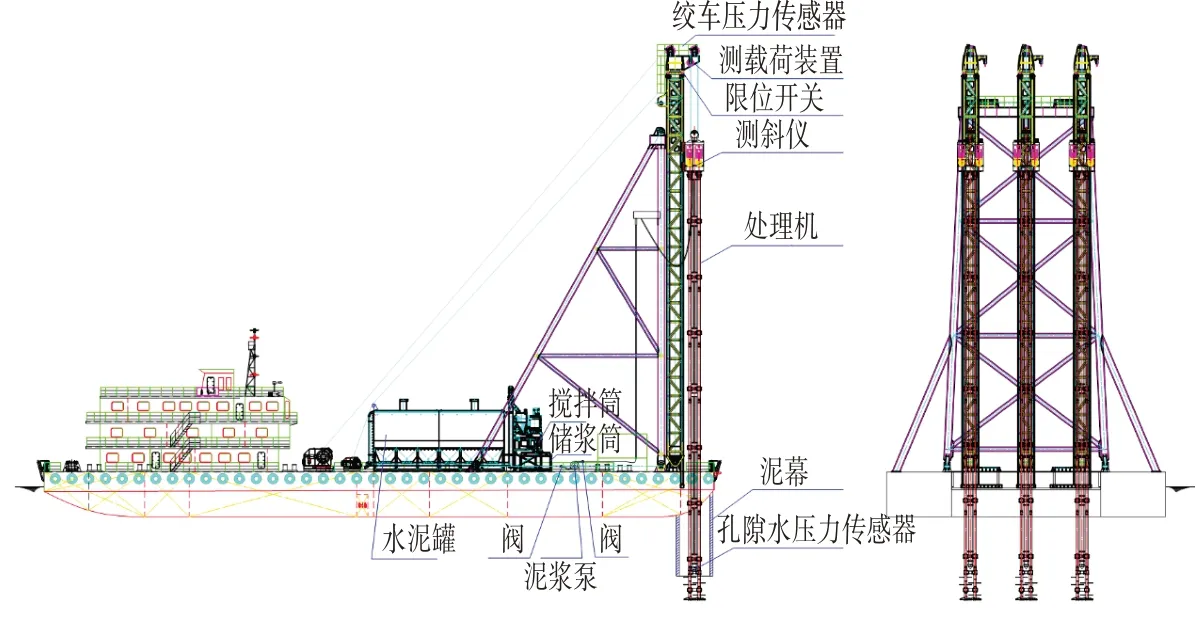
图1 DCM船结构及设备组成Fig.1 Structure and Equipment Composition of DCM Ship
2 DCM船施工管理系统
“DCM 船施工管理系统”是一个高度集成的操控系统,是DCM船的控制中心,系统主界面如图2所示。
该系统包括“DCM 船施工定位子系统”和“DCM船施工控制子系统”2个子系统。系统采用工业电脑、PLC 为核心,施工数据及后台制浆的运行情况通过双显示器显示。此外,它可记录、保存工作中的数据,输出工艺曲线和数据表格,可供用户分析DCM 桩的整个施工过程。具有DCM 桩基设计参数存储、平面定位实时显示、施工过程参数设定及控制、施工过程数据储存、施工报表导出、数据WEB 传输等功能,可实现对整个施工过程的监测与控制,实现各个子系统之间的信息数据共享、联动控制等,安全、方便、可靠。
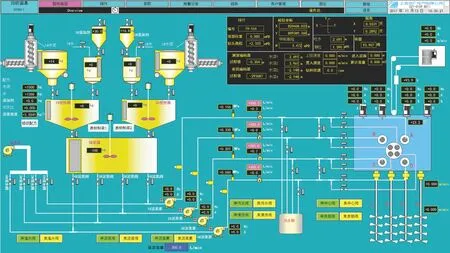
图2 DCM船施工管理系统主界面Fig.2 DCM Ship Construction Management System Main Interface
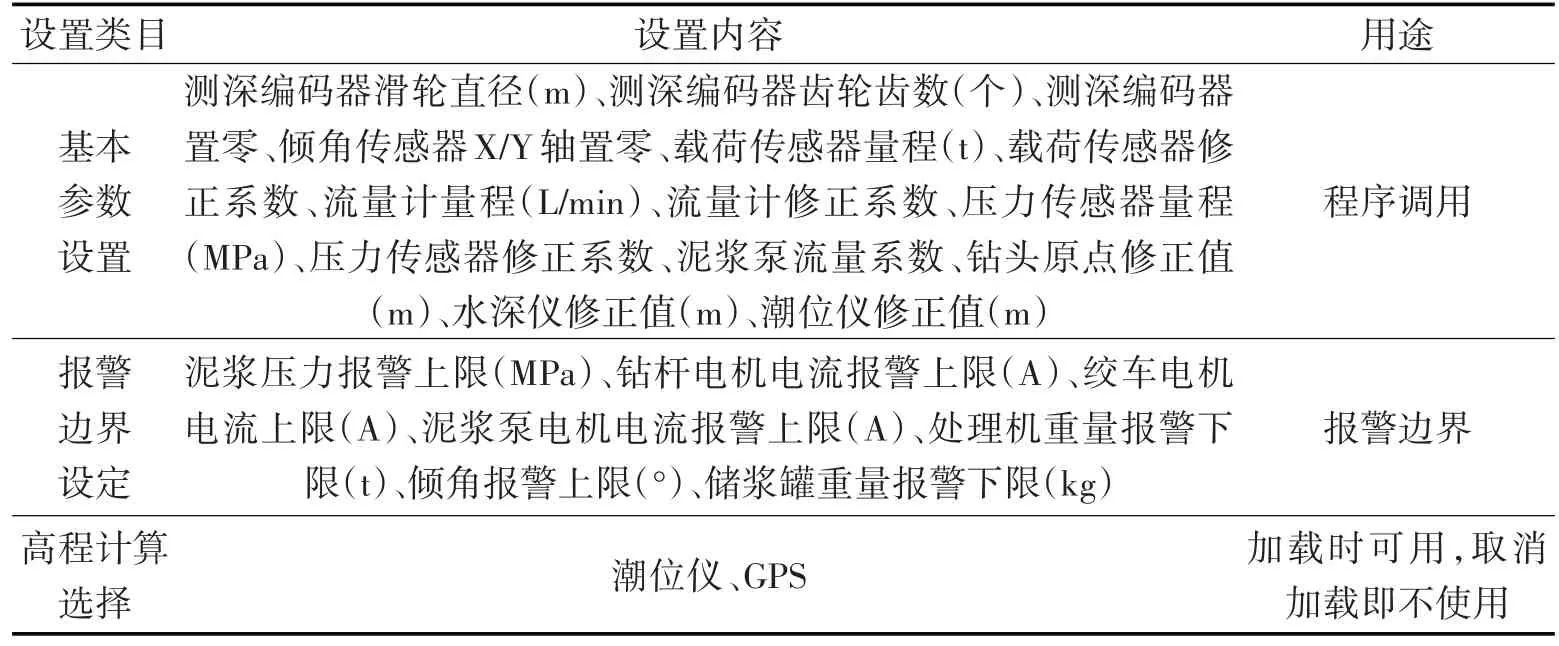
表1 施工管理系统参数设置Tab.1 Construction Management System Parameter Setting
系统通电后,各子系统自检并与施工管理系统建立数据链接,操作人员可根据GPS 定位,将船移至桩位;自动调倾系统同时校正船体倾角。开始打桩后,施工管理系统读取并记录GPS 桩位、海底泥面高程、潮位等信息,确定桩底后,系统根据钻头高程、时间判定不同阶段切换,从而达到自动化成桩,同时上位机计算桩底标高,桩顶、桩长度、预计浆量等,方便操作人员监控操作,并归档电流、高程、喷浆量、喷水量等数据到数据库,结束打桩后,操作人员可导出数据库数据以及上位机上的临时数据到单桩报表中。施工管理系统主要控制参数设置如表1 所示,总体控制与管理流程如图3所示。
2.1 DCM船施工定位子系统
针对复杂的海上环境,研制快速高效的DCM 船舶定位控制系统。该系统通过系泊绞车放长或收缩锚缆来实现船舶的移位,使DCM 搅拌轴的实际位置逐步趋近于设计坐标,实现定位偏差满足设计要求的±0.1 m,使测量系统和锚泊系统有机融合,确保施工测量定位精度。并且可根据预先规划的桩位进行自动移桩,并以图形的形式显示,提高施工定位效率。
2.1.1 船舶定位系统
DCM 船上布置 4 台徕卡 GS25 GPS 接收机(包含备用GPS),接收卫星信号和差分信号,提供实时定位信息。在3 个DCM 桩架上各安装 1 个GPS 倾斜仪,提供实时角度信息。设置好船舶坐标系基础参数,输入DCM 桩设计坐标,系统可计算得出实际位置与设计坐标的偏差值及方向。操作人员可以根据软件的提示移动船体,使搅拌轴的实际位置与设计位置重合,达到定位目标。
2.1.2 船舶移位系统
船位移位系统的移船绞车可以在机旁人工直接操纵,也可以在操纵室绞车控制台遥控操纵。兼具手动和自动操作模式。手动模式将船舶调整到接近目标位置时,启动远程自动控制模式实现自动定位。自动控制模式下,控制系统根据施工过程的需要,实现对绞车刹车的自动控制和绞车恒张力的自动调整设置。
2.2 DCM船施工控制子系统
根据DCM施工工艺,将施工机械动作与系统软件结合,实现自动、半自动控制,同时对主要施工参数进行监控和记录,确保施工质量。其中DCM 打桩系统可分手动调试、半自动、全自动3 个可选操作模式。水泥浆制浆系统可分为手动、全自动2 个可选操作模式。
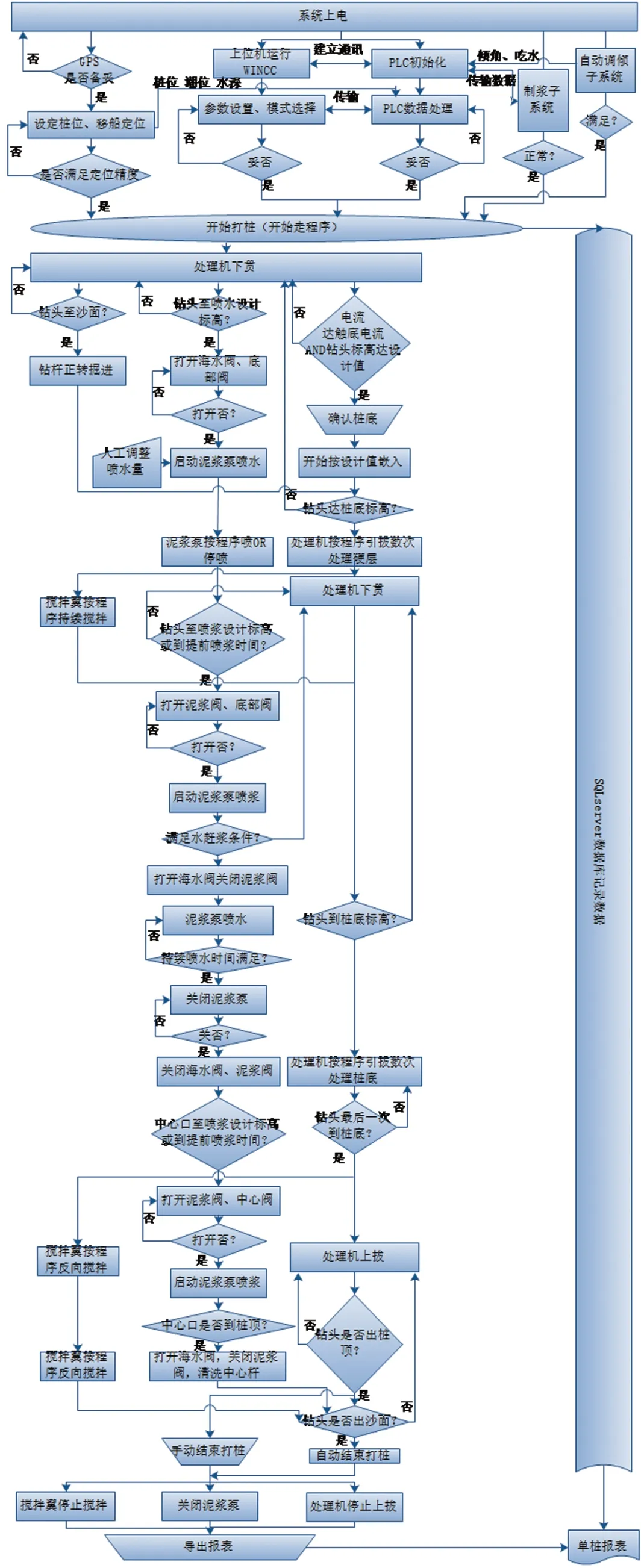
图3 施工管理系统总体控制与管理流程Fig.3 Construction Management System Overall Control and Management Flow Chart
施工系统可预先根据各种要求的桩的施工参数进行预设。完整的成桩过程的系统动作包括搅拌翼旋转、下沉/提升、固定管喷浆口喷浆、搅拌翼喷浆口喷浆等[9],不同阶段都可以事先设定,自动模式下可按照设定程序自行完成。搅拌机的转速、下沉/提升速度可以根据设定转数进行自动调节已满足要求,也可以根据处理土每m3水泥用量来自动调节下沉/提升速度及喷浆量。控制系统界面上会显示处理机悬挂钢丝绳张力,搅拌轴扭距及电流、电机功率等信息,如有异常会自动报警提示,并设有紧急停止按钮。
2.2.1 船舶自动调平系统
船舶自动调平系统主要组成部件如下:双轴倾斜仪、阀控柜、液位采集单元、平衡舱压力传感器及四角吃水传感器、泵控柜、操作控制台、触摸屏、计算机、自动调平软件。可根据纵、横倾状态遥控操纵平衡水泵及相应系统中的阀门调整横倾平衡舱、纵倾平衡舱等水位;根据船艏、船艉吃水,调整船舶压载舱水位,调整船舶姿态满足作业工况的要求。调载系统为手动/自动跟踪调载,通过自动调倾系统的调节,结合倾斜仪反馈数据有效调整船体平衡,确保处理机的倾斜角度在±0.1°。
2.2.2 DCM处理机控制系统
DCM 处理机采用变频起动控制,由水泥深层搅拌控制系统配套,并能在水泥深层搅拌控制台控制。深度计可以获得钻头与船舶甲板的深度,再结合实时的潮位及船舶吃水数据,可以准确地计算出钻头的高程,再由操纵室左右舷绞车控制台集中控制处理机升降,可以实现预先设定的钻头运动轨迹。
其操作过程为:在DCM 船移船到位后,移船控制系统发出移船到位的信号给施工管理系统,DCM处理机起升系统将自动根据施工管理系统设定好的贯入速度开始放下处理机,处理机在进入海水、进入泥面初期、进入泥面中期、触底时等各个位置状态对应于不同的下降速度,在确认钻头下贯到设计要求的土层标高后,开始喷浆上拔。上拔时,不同的高程位置也对应于不同的上拔速度。另外,升降速度还将配合自动调载系统进行变化。
2.2.3 水泥浆制作及输送系统
水泥浆制作及输送系统包括水泥储存罐、水泥浆主机、抗脉冲振动压力储罐、灌浆泵和水增压泵等,水泥浆主机由除尘器、物料秤、水泥浆搅拌桶,水泥浆储存桶和空气压缩机等组成。施工管理系统与水泥浆处理系统通过以太网通讯,采集水泥、水、添加剂的称重数据,水泥浆储料器物位,水泥、水、添加剂输送电机,搅拌器的运行状态和报警信号。水泥浆和海水均可以通过灌浆泵进行输送,系统通过阀门切换来实现不介质的转换。喷水和喷水泥浆的量按照预先设置的参数进行。
水泥浆制作系统参数设置可以实现水、水泥、添加剂的定量投料,满足施工配合比的要求,水泥浆的制作过程通过数据传输反馈给施工管理系统。
2.2.4 施工监视
施工监视系统中包括水泥深层搅拌控制台,该控制台能够显示DCM 处理机桩架、处理机实时状态、钻头入泥深度、水泥舱、制浆机、输浆泵等作业工况的相关参数,显示相关作业流程。监测喷浆压力、累计流量、瞬时流量、水泥浆密度、每延m 土体的水泥喷浆量、搅拌头贯入速度和提升速度、搅拌叶片旋转速度、DCM处理机扭矩、电流、频率、电压、胶结材料类型、组分、水灰比、土层面(海床面)标高、DCM处理机钻头底端高程、搅拌桩嵌入土层的标高范围、各土层的标高范围、搅拌桩完成后终孔底标高、DCM 处理机钻杆的倾斜度、船舶中心点、DCM 处理机转轴坐标;船舷标高、桩架顶部标高、土体的孔隙水压力监测、实时潮位等参数。该系统配备远程数据传输功能,可以将施工数据实时传输。
3 结论
DCM船施工管理系统具有船舶平面定位与移船、船舶自动调平、DCM 桩施工过程参数设定、施工过程控制及监视、数据存储及传输,实现各个子系统之间的信息数据共享、联动控制等,是DCM 船舶的关键技术之一。
该施工管理系统的应用提高DCM 船的自动化水平,既提高了施工工效,又提高了DCM 施工的质量,在香港机场三跑道项目DCM 施工中产生了良好的效益。验证了该系统的稳定性、可靠性、测量精确度及抗干扰能力。随着DCM 工艺研究的深入和施工经验的积累,施工管理系统也将结合神经网络、云服务等先进技术,变得更加高度自动化、智能化。
