自动狗粮投食机搭载AI技术可实现远程训狗狗
2020-04-06
尽管网上关于训练宠物狗的方法千千万万,但不得不承认,一旦有了距离限制,再高效的训狗技巧也只是纸上谈兵。近日,美国科罗拉多州立大学一组研究团队基于 AI 技术研发了一套智能训狗系统,可在没有人工协助的情况下教会狗狗遵守指定的口令。
据介绍,目前最有效的训狗方式都是基于奖励机制实现的,即狗服从命令时会受到食物、抚摸等奖励,从而激发狗的积极性。研究人员便在奖励机制的基础上,创建了一个人工智能计算机系统,称为 NVIDIA Jetson Nano。该系统具有专用于狗狗训练任务的硬件和软件,包含 AI 软件、摄像机、扬声器、食物分配器等组合而成。
目前,人类已经掌握了通过食物或表扬等奖励驯服狗狗完成期望动作的技巧。但在训练的早期阶段,当行为得不到及时奖励时,狗狗的习得行为可能会有所减少。为了最大限度地提高学习效率,研究人员想到可以利用机器学习来模拟训犬师的动作,以识别行为,并实时强化 “坐下”或 “躺下”等命令。
具体的步骤是利用 NVIDIA Jetson Nano 上的神經网络实现,该系统配有摄像头和传送食物等硬件机制。一旦系统检测到狗狗存在,便会下达诸如躺下、站立或者坐下的指令;随后摄像机会记录狗狗对命令的反应,并通过 AI 软件分析狗狗的行为,系统还会将狗狗的实时图像与训练数据进行比较,并确定狗狗是否遵守命令,最后再根据结果判定是否给予奖励。
同时,由于此前没有专门犬类对应动作标签的数据集,研究团队决定采用斯坦福犬类数据库,并对一组四个动作进行手工标注:站立、坐下、躺下和未定义,分别得到 4143、3038、7090 和 6307 个样本。在 20578 个总样本图像中包含 120 个不同的犬类品种,及在不同的场景下的图像信息。据悉,样本的多样性对于建立犬类行为分析数据库非常重要。
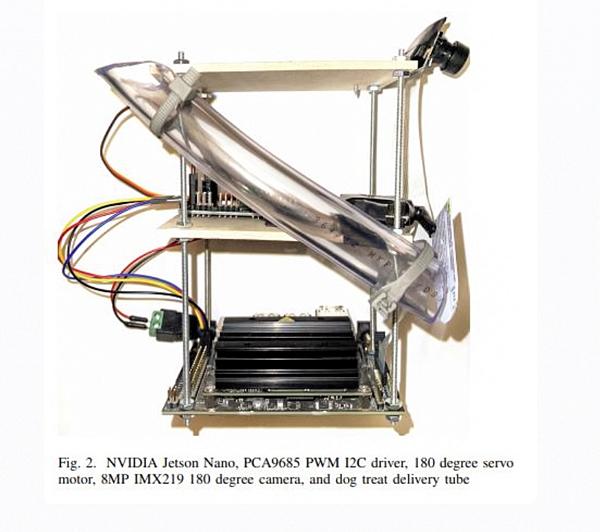
从硬件外观上来看,这个集成系统更像是一个宠物自动投食机。研究人员介绍,这个投食机是一个长宽高 5 × 5 × 8(单位英寸)的长方形,装置顶部安装有摄像头,侧面包含一个用作储存零食的传输装置,当 AI 判定可以奖励狗狗时,零食传输装置底端的电机臂旋转打开,食物就会自然流出来。
NVIDIA Jetson Nano、PCA9685 PWM I2C 驱动器、180 度伺服电机、8MP IMX219 180 度摄像头和零食输送管,Jetson Nano 搭载了 128 个 NVIDIA Maxwell GPU 内核,4 GB RAM,并配备了 10W 可切换电源,以保障最佳性能。并且 Nano 具有 GPIO 接口,可与相机、电机和扬声器等外部设备配合使用。这些足够保障实验中的设计模型与迁移学习模型的正常运算。

狗的不同行为相对应的数据集样本

CompanionPro 犬类训练器
测试结果显示,通过迁移学习训练的精准率可达到 92.06%。
研究人员指出,他们建造的原型完全独立于其他系统,因此命令列表必须简短。同时,他们提议建立一个更强大的系统,可以依靠远程处理来扩展命令的数量。他们还注意到,此项系统的商业化的落地,将会帮助人们在不在家的时候训练他们的宠物狗。
实际上,利用 AI 人工智能驱动的训犬设备在 2020 年初就引发过一阵热议。一家名为 Companion Labs 的公司研发出一款名为 CompanionPro 的犬类训练器,搭载了 Google Edge TPU AI 处理器、图像传感器、扬声器和投食设备。同时也选择了 TensorFlow 作为深度学习平台,并在 GPU 上本地运行生成模型,以确定狗狗的实时行为从而训练狗狗。
对此,NVIDIA Jetson Nano 研究团队表示,尽管此前通过人工智能技术对犬类观察的研究很多,但这些研究更侧重于捕捉狗的行为,比如通过可穿戴传感器捕捉到狗的姿势,例如坐着、站着或吃东西。这些都是通过基于方差的阈值来划分类别的算法进行分类。但针对计算机视觉观察或分析狗狗的行为研究,还有很大的空间可以挖掘。
“利用计算机视觉技术对单独使用相机的场景进行推断,从而分离了对专用硬件的需求。使用计算机视觉识别行为的能力是一项具有挑战性的任务。如何为嵌入式设备上的应用设计一个基于视觉识别的最佳的神经网络,这是我们核心研究方向。”该研究团队曾公开表示。
(摘自美《深科技》)(编辑/费勒萌)
