带母线电压多级补偿的直流微网下垂控制策略
2020-04-06刘宿城吴亚伟李中鹏刘晓东
刘宿城,吴亚伟,李中鹏,刘晓东,方 炜
(安徽工业大学电力电子与运动控制省重点实验室 安徽 马鞍山 243032)
目前,微电网已成为可再生能源利用的有效组网形式[1-2]。相对于交流微网,直流微网无需考虑相位、无功和频率调控且具备高效和低成本的优势[3-4]。
为了实现直流微网的可靠运行,在直流微网的能量管理策略中普遍采用分层控制以实现不同控制目标的解耦设计[5]。其中,在初级控制层面广泛采用下垂控制策略实现微网底层初级控制中模块间的自主均流和模块单元热插拔[6-7]。由于负载或微源的电流或功率并非时刻保持不变,传统下垂控制策略无法对其进行实时调节,所以如何优化下垂控制策略的功率分配精度,减小因其引起的母线电压偏差成为研究的关注焦点之一。
文献[8]利用下垂系数是输出电流的函数关系,提出当输出电流增加时增大下垂系数,在轻载时可减小母线电压偏差的改进下垂控制,尤其在重载时可减小传感器与线路电阻的影响。文献[9]提出一种混合储能并联控制策略,可实现不同类型储能模块的频段功率响应以及同类型储能模块的功率均分。文献[10]采用储能SoC 幂指数下垂控制来提高储能单元SoC 均衡和功率分配。文献[11]提出一种根据母线电压差值自适应调整下垂系数以抑制并联变流器间环流的改进下垂控制策略。文献[12]针对低压直流微网,提出一种利用因负荷增加而导致系统输出特性呈现非线性变化特点的自适应下垂控制策略使功率模块间的均流精度得到提高,但并未解决母线电压偏差问题。文献[13]针对多端柔性直流输电系统,通过分析下垂系数与换流站等效电阻的关系提出改进下垂控制策略,可灵活实现换流站多端协调。文献[14]研究了直流微网中功率单元的均流误差和参考电压偏差二者间的矛盾,但对线路阻抗的影响并未分析。文献[15]提出一种基于DBS 改变下垂输出电压特性的下垂控制策略,以在输入电压变化时获得均等的电流分配。文献[16]借助通信网络提出一种基于P 控制器的控制策略来修改下垂增益以获得精确的电流分配和电压调节。文献[17-18]通过使用低带宽通信共享输出电流信息来提高负荷均流精度并补偿母线电压跌落。文献[19-20]采用分布式弱通信网络,通过离散一致性迭代算法动态寻求最优下垂系数,在满足模块均流精度的同时,可降低母线电压偏差,但会使系统的暂态性能降低。文献[21]通过引入电压变化率代替下垂控制中的电压V,改善负荷电流的分配精度,同时引入归零控制器补偿母线电压跌落。文献[22]通过增加补偿电阻减小功率扰动对母线电压的影响,增强阻尼特性从而提高系统的动态特性。文献[23]提出一种分段线性下垂控制方法,根据负荷轻重不同分割下垂特性曲线来改善模块间的均流效果,但并未考虑对母线电压偏差进行补偿。
综上所述,在底层初级控制中,现有的下垂控制策略虽然可以满足功率模块间的均流性能或功率分配效果,但因下垂特性导致的母线电压偏差还需通过二次功率加以补偿。为此,本文提出一种带母线电压多级补偿的直流微网分段线性下垂控制策略(piecewise linear droop control, PWLDC),根据负荷轻重不同对负荷区间实施分段控制,将负荷区间分成3 个区域来灵活配置微源电压模块的下垂系数。同时,引入母线电压多级前馈补偿以补偿母线电压跌落问题,可在初级控制层面解决模块均流性能与母线电压偏差间的矛盾。充分考虑线路阻抗对均流精度的负面影响,在保证母线电压偏差范围合理的基础上,通过增加下垂系数提高系统模块间的均流性能。由于在负荷区域1(轻负荷)时模块的输出电流较小,导致较低的母线电压跌落,因此PWLDC 策略主要在负荷区域2 和负荷区域3 实现电压前馈补偿。本文首先对传统下垂控制中存在的问题进行分析,然后提出PWLDC 策略的设计思路,进而探讨其实现方式,最后通过实验验证所提控制策略的优越性。
1 传统下垂控制存在问题分析
图1 为典型的光伏主导型直流微网结构:当母线电压由光伏和储能或者多个储能单元控制时,系统采用下垂控制策略。直流微网可通过双向AC/DC 变换器与交流电网相联,运行在并网或孤岛模式。
图2为包含两台微源电压控制模块的直流微网等效模型及其电压-电流下垂特性曲线,根据图2a可得母线电压为:
式中,下标j 表示第j(j=1,2)台电压控制模块;Vbus为直流母线电压;Vrefj、ioj、Rdj和Rlj分别为第j 台电压控制模块的参考电压、输出电流、下垂系数和线路电阻;图2a 中io表示负荷电流。
由式(1)可知,下垂系数和线路电阻的大小与母线电压跌落深度呈正相关,并且功率模块的输出电流越大,母线电压跌落越多。
再看均流性能与母线电压偏差的关系。根据图2b,假设Rej为第j 条电源支路的等效电阻(Rej=Rdj+Rlj),当两台模块的参考电压和下垂系数均相同仅线路电阻不同(Rl1≠Rl2)时,可作出两模块的电压-电流下垂特性曲线如图2b 中两条实线所示。当下垂系数增大(Rej增加到R′ej),下垂特性曲线如图2b 中的两条虚线所示。可以看出,随着下垂系数增大,模块间有更好的均流效果(ΔIo12>ΔI′o12),但是,母线电压跌落也更多(ΔV′bus>ΔVbus),这与式(1)相吻合。
可见,传统下垂控制策略虽能提高系统的均流性能,但是也会带来较大的母线电压跌落问题,使得设计无法兼顾均流精度及母线电压调整的要求。
2 PWLDC 策略的提出
针对传统下垂控制策略无法兼顾均流精度与母线电压发生跌落的矛盾,提出PWLDC 策略:1)根据直流微网负荷区间的轻重不同对下垂系数进行分段柔性配置;2)同时,针对母线电压跌落问题,采用母线电压多级前馈补偿方法,可在初级控制层面同时解决模块均流与实现母线电压调整率间的矛盾。
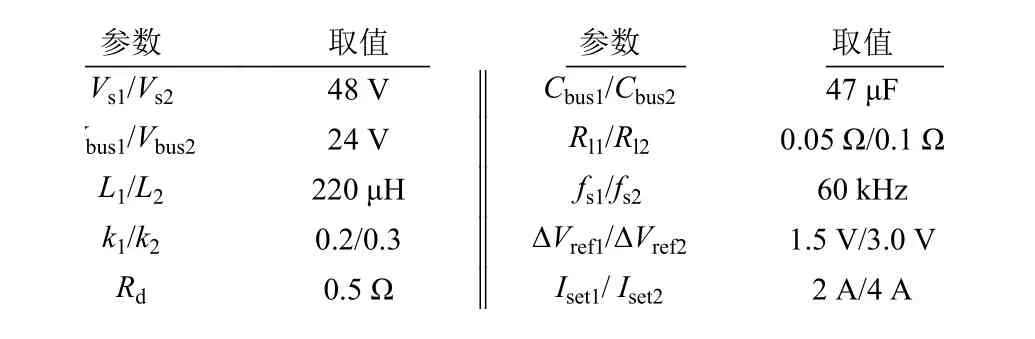
图3a 为所提PWLDC 策略的下垂特性曲线,图3b、3c 为PWLDC 策略与传统下垂控制输出特性对比。由图3a 可得,PWLDC 策略以负荷电流io为对象将直流微网的负荷分为3 个区域:负荷区域1、负荷区域2 和负荷区域3。为了满足模块均流要求,根据3 个轻重不用的负荷区间灵活配置下垂系数,负荷越重时为取得更好的均流效果取较大下垂系数;同时,为了补偿因采用传统下垂控制而导致的直流母线电压跌落问题,根据跌落量的不同,分别在负荷区域2 和区域3 中加入一级和二级参考电压补偿∆Vrefn(n 在负荷区域2 取1,在负荷区域3 取2)。当直流微网工作在负荷区域2 时(Iset1≤Io 同理,当Io≥Iset2时,系统工作于区域3,此时,分段系数和参考电压补偿分别设定为k2和∆Vref2,功率模块的电压-电流下垂特性曲线为图3c 中#3 段,母线电压为: 式中,Vref表示为直流母线参考电压;kn和Isetn(n=1,2)分别表示在PWLDC 策略下,变换器模块工作于输出特性曲线#2 和#3 时的分段系数和分段电流设定点。k1为负荷区域2 的分段系数,设模块的初始下垂系数为Rd(Rd1=Rd2=Rd),则通过k1的取值可以改变下垂曲线的斜率,在区域2 时为(Rd+k1);k2为负荷区域3 的分段系数,则通过k2的取值可以改变下垂曲线的斜率,在区域3 时为(Rd+k2)。 同样以图2a 所示的直流微网等效模型为例,在确保相同的均流精度条件下,对采用传统下垂控制策略和PWLDC 策略所引起的直流母线电压跌落进行对比分析,结果如图3b 和3c 所示。其中,图3b 表示处于负荷区域2 的负荷电流在Iset1和Iset2之间时,采用传统下垂控制策略的功率单元输出电压-电流特性曲线对应为Rcon与R′con段,采用PWLDC 策略时功率单元的电压-电流特性曲线对应为#2 与#2′段。可以得到,在保证两种控制策略实现均流误差都为ΔIc2的前提下,采用后者所导致的母线电压跌落明显小于前者(ΔVbus<ΔV′bus)。同理,两种控制策略在负荷区域3 的对比如图3c 所示,在相同的均流误差ΔIc3条件下,采用后者所导致的母线电压跌落也明显小于前者(ΔVbus<ΔV′bus)。 由上述分析可知,PWLDC 控制策略在实现并联功率单元均流性能时,加入母线电压多级前馈补偿,通过对∆Vrefn、kn和Isetn的设定,使系统在整个负荷区间既能获得较好的均流性能,也能获得较低的母线电压调整率,实现优化控制。 考虑线路阻抗对均流性能的负面影响,假设文中取下垂系数Rdj的值远大于线路电阻,令最大直流母线电压偏差为ΔVmax(一般为5%Vref),则根据直流母线电压偏差的约束条件,下垂系数的取值应满足: 为了与式(4)相符合,则模块初始下垂系数Rd<2∆Vmax/io。令Rd为初始下垂系数,则对系统负荷进行分区后可得分段电流点Isetn为: 参考电压补偿信号∆Vrefn可取值为: 式中,n 在负荷区域2 时取值为1,在负荷区域3 时取值为2,若有多个分割区域,依次顺延。 根据直流母线电压跌落范围的要求,设置负荷电流分段点Iset1为∆Vmax/Rd,则Iset2取值为Iset1的两倍。当采用PWLDC 策略且两电源模块工作在同一负荷区域时,可得直流母线电压为: 式中,R 表示系统的负荷电阻。 另一方面,假设直流母线电压工作偏差为ΔVbus,则实际的母线电压为: 结合式(7)与式(8),可求得分段系数kn的取值为: 为了更加明确Rej和kn相互间的影响,保持Rlj只在0~Rd范围内,令Rd=0.5 Ω,则直流微网两条支路线路电阻Rlj的取值在0~0.5 Ω 之间,支路等效电阻Rej在0.5~1 Ω 之间,基于式(9)可得kn与Re1和Re2的三维关系曲面图,如图4 所示。kn的大小与Rej呈正相关,并且当Rej确定时,也可根据图4 得到对应的kn值。 针对电源模块在电流分段点处因指令不同而导致的负荷电流不均情况,将负荷电流平均值作为负荷区间分段的判断条件,利用CAN 通信网络实现相邻模块间的通信。在分区控制时,将平均电流与每个电源模块所设定的电流分段点Isetn进行比较,当两条支路选则相同的Isetn时,可以确保分区控制的一致性,使两电源模块始终工作在同一个负荷区域。 同时,为了避免在电流分段点处因受电流扰动影响而导致的重复切换问题,在负荷分段点处加入滞环算法。图5 给出了在电流分段点处加入滞环控制的示意图,其中滞环环宽D 为0.1 倍额定输出电流,当负载电流减轻时电流分段点设定为(Isetn−1/2D),负载电流加重时则为(Isetn+1/2D)。 根据上述,以包含两台下垂控制模块的直流微网为例,将PWLDC 策略的实现综合为图6 所示的结构框图。 为了验证所提PWLDC 策略的有效性,搭建了基于图6 的直流微网结构的硬件电路实验平台,如图7 所示。其中,两台功率模块单元均为Buck 变换器电路拓扑,主要参数如表1 所列,其中Vgn、Von、Ln、Cn和fsn分别表示模块n 的输入电压、输出电压、线路电感、输出滤波电容和开关频率(n=1 或2),控制算法基于TI DSP2812 处理器实现。 表1 直流微网主要参数 设置直流微网全负荷区间线性连续变化,可测得当采用PWLDC 策略时,功率模块的输出电压-电流下垂特性曲线如图8 所示。从图中可看出,当负载电流上升进入到负荷区域2 和负荷区域3 时(达到所设置的电流分段点),所提控制策略相应地在两个负荷区域分别引入一级和二级电压前馈补偿,以此来提高功率模块输出电压参考,并且调整下垂系数以满足均流要求。 图9为当负载电流大小从1 A 连续上升到12 A 时,功率模块1 和功率模块2 的输出电压-电流波形。由图9a 可得,未加入CAN 通信时两模块的输出电流在设定点Iset1和Iset2处出现了电流不均分;而图9b 显示加入CAN 通信后,在分区电流设定点处消除了电流不均分且分段点处的母线电压得到了补偿。 图10 为采用传统下垂控制策略与PWLDC策略的对比实验波形,设置负载电流大小从2→6→12 A 进行连续跳变。图10a 与10b 为直流微网采用传统下垂控制时,当Rd=0.1 Ω 和Rd=0.5 Ω 条件下的实验结果。当Rd=0.1 Ω 时,虽然在负荷区3 的母线电压跌落仅为1 V,但是由两台功率模块的输出电流可以看出均流效果较差;当Rd=0.1 Ω 时,虽然均流性能得到了保证,但却又导致在负荷区3 的电压跌落高达4 V。而PWLDC 策略的实验结果如图10c 所示,与图10a 与10b 对比可知,在负荷区域2 和区域3 时采用PWLDC 策略引起的母线电压偏差ΔVbus均远小于传统下垂控制的ΔV′bus,且均流精度得到提高。因此,PWLDC 策略能明显改善直流微网的均流性能且减小母线电压偏差。 针对直流微网中传统下垂控制在模块间均流性能和发生母线电压跌落间的矛盾,本文提出了带有母线电压多级补偿的分段线性下垂控制策略,理论分析与实验结果表明: 1) PWLDC 策略通过负荷轻重不同分段配置下垂系数,具有高度设计灵活性;同时针对母线电压跌落引入母线电压多级前馈补偿,能够在初级控制层面改善电流功率分配并实现较低的母线电压调整率,优化和匹配下垂设计。 2)由于所提控制策略是根据系统的整个负荷区间对下垂系数进行设计,所以对于负载具有一定的自适应特性,且控制系统不另外需要传感器,实现较为方便。3 PWLDC 策略的实现
4 实验验证
5 结 束 语
