模拟线圈型电磁曲射炮设计
2020-04-02张雨莎
张雨莎
(重庆交通大学机电与车辆工程学院,重庆400074)
1 系统方案
1.1 技术路线
电磁炮发射系统需要实现目标识别、精准定位和电磁驱动三个功能。利用openmv 摄像头系统对目标对象进行图像二值化阈值设置,运用色块识别blob 函数采集选定目标颜色,完成目标识别功能。然后通过单片机处理系统将图像位置信息转化为像素坐标,比较反馈坐标与预设坐标的差值,将此差值通过PID算法转化为云台系统两个电机的转动角度,同时激光测距反馈距离数据,并对抛体运动进行倾角计算和多项式拟合运动轨迹分析,最终确定发射角度。再运用电磁感应理论、单脉冲工作电流、交直流变换及电容器储能特性等理论知识,结合定位信息实现弹丸发射。

图1 技术路线框图
1.2 方案选择与论证
1.2.1 储能电容器的选择与论证
方案一:选择3 个100F 2.7V 的超级电容串联。电容容量过大,我们所能提供的电压过低,导致放电电流过慢,产生的磁场强度不够,弹丸无法弹出。
方案二:选择2 个100uF 450V 的普通电容并联。电容容量较为合适,同时使用逆变器后,电压压值足够,能够产生较大的驱动磁场。
经实验比较论证,采用方案二。
1.2.2 储能电容器充放电切换模块的选择与论证
方案一:利用普通家用开关切换。通过接入普通的家用耐高压开关,人工秒表计时,手动操控开关的开启与关闭,达到储能电容器充放电的切换。该方案由于人为手动控制,断电时间把握不精准,同时高压情况下存在一定危险性。
方案二:利用继电器切换。只要在线圈两端加上一定的电压,流过电流,产生电磁效应,衔铁在电磁力吸引的作用下动触点与静触点(常开触点)吸合。当线圈断电后,电磁的吸力也随之消失,使得动触点与原来的静触点释放。这样吸合、释放,从而达到了在电路中的导通、切断的目的。
方案三:利用可控硅切换。利用可控硅的导通特性来控制,当超级电容储蓄电压达到可控硅的导通电压后,可控硅打开,导致电路短路,从而使发射装置接入电路,电容放电,弹丸射出。
考虑到本设计中所使用的高电压供电以及元件模块的耐压值,经过实验论证,选择方案三。
2 系统硬件设计
2.1 硬件结构
整个系统由一个12V 直流电源模块经过两个稳压模块电路分别给STM32 单片机控制系统和发射装置供电。单片机系统通过激光测距和摄像头采集的信息反馈,以键盘控制的方式确定云台的转动角度,实现精准定位。12V 直流电压在转换器工作条件下逆变为220V 交流电压,三个超级电容并联作为储能容器,驱动线圈和发射体运动。充电期间,由单片机定时控制可控硅的导通,确保准确断电的效果。

图2 硬件结构图
2.2 电路设计
2.2.1 充电电路
充电回路包括充电电路、稳压电路和电容器组。通过逆变器将12V 直流电源转换为220V 交流电源,在短时间内可供超级电容迅速充电。
2.2.2 放电电路
电容器组,线圈、开关和起连接作用的导线共同组成放电回路。电磁发射过程实质上是一个瞬间放电的过程,这里使用了可控硅作为放电回路的控制开关。由于电感总是会存在于电路中, 因此将电容和电阻串联起来就会有阻尼的效果, 它能够避免R-L-C 在放电过程中,因为振荡的关系使电容器发生的过电压损坏;并且可以避免电容因为放电电流过大,而损坏可控硅(如图3)。
3.系统软件设计
3.1 主要算法与驱动
3.1.1 色块识别
Openmv 中通过find_blobs 函数可以找到色块,函数调用如下: image.find_blobs (thresholds,roi=Auto, x_stride=2, y_stride=1, invert=False,area_threshold=10, pixels_threshold=10, merge=False,margin=0, threshold_cb=None, merge_cb=None) 通过参数thresholds 设置颜色阈值,若只需单种颜色,仅需要一个颜色阈值;想要多种颜色阈值,需要多个颜色阈值。在返回的色块对象blob 可以调用code 方法,来判断色块颜色。
3.1.2 PID 算法
PID 控制算法作为闭环控制算法的基础,当不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID 控制技术。在单回路控制系统中,由于扰动作用使被控参数偏离给定值,从而产生偏差。自动控制系统的调节单元将来自变送器的测量值与给定值相比较之后产生的偏差进行比例、微分、积分运算,并输出统一标准信号,去控制执行机构的动作。
3.2 程序功能描述与设计(如图4)
程序初始化完成后,分别针对不同要求进行模式选择。模式一通过键盘设置参数,云台自动运行并调整角度后,触发弹丸发射,实现弹丸发射的基本要求。模式二通过自动运行,完成对目标对象的搜索,利用激光测距调整角度后发射弹丸,模式三则是摄像头通过水平旋转一定角度,直至搜索到目标后完成发射,实现另两项基本要求。
4 测试方案与结果
4.1 测试方案与数据
4.1.1 测试方案:在平地上粘贴画有刻度线的A4 白纸,刻度线范围从2 米至3 米,期间每10 厘米画一条线。在A4 纸前端立有红色环形靶。发射管道在配备有云台、摄像头的情况下,自动调整角度,发射弹丸。记录PWM与射程数据于表1。
4.1.2 测试数据

表1 数据记录表
由上表数据可知,当PWM 占空比设置为1700-1725 之间能基本满足射程2.5 米的要求。
4.2 结果分析

图3 充放电电路原理图
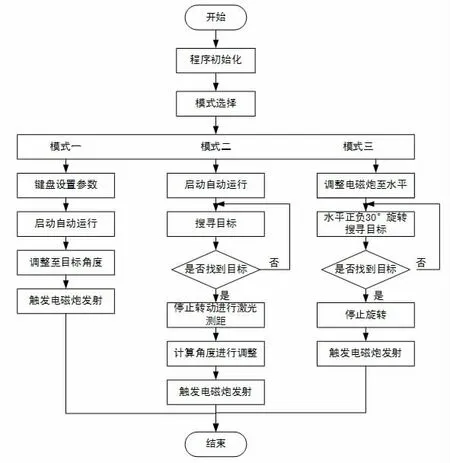
图4 程序流程图
通过多次重复性实验,利用数据建立函数分析,可得:在12V 直流电源经逆变器变为220V 交流电源的供电系统下,充电10s,PWM占空比设置在1700-1725 之间,平射射程至少2.5米的准备条件下,弹丸发射更精准。
结束语
本系统模拟电磁曲射炮,实现炮管水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶。系统主要包括电源模块、充放电回路、发射装置、摄像头模块、激光测距模块,利用色块识别、PID 控制算法、交直流变换、电磁感应等理论算法可实现图像识别、精准定位以及电磁驱动的功能。
