基于智能制造平台的机器人快换夹具结构设计及程序研究
2020-04-01廖小吉
廖小吉
(唐山工业职业技术学院,河北 唐山 063299)
0 概述
智能制造产业链涵盖智能装备(机器人、数控机床、服务机器人、其他自动化装备),工业互联网(机器视觉、传感器、RFID、工业以太网),工业软件(ERP/MES/DCS),3D打印以及将上述环节有机结合的自动化系统集成及生产线集成等[1]。从全球范围来看,除了美国、德国和日本走在全球智能制造前端,其余国家也在积极布局智能制造发展。
工业机器人是智能制造业最具代表性的装备。全球工业机器人40 年形成了约160 万台套装机量,2019 年全球预计新装工业机器人18.2 万台,主机市场80~100 亿美元,并带动约3 倍左右软件集成、周边配套设备、系统工程等系统集成市场[2-3]。
本文聚焦智能制造发展大方向,基于智能制造理念,借助三维设计软件完成机器人相关部分硬件结构设计并基于机器人编程语言完成软件部分程序的编制,主要涉及到机器人快换夹具结构设计及机器人快换程序的实现。本文搭建的软硬件系统可作为智能制造系统的重要单元,对于智能制造系统的应用研究起到一定的理论推进作用。
1 机器人快换夹具结构设计
1.1 机器人快换夹具工作台
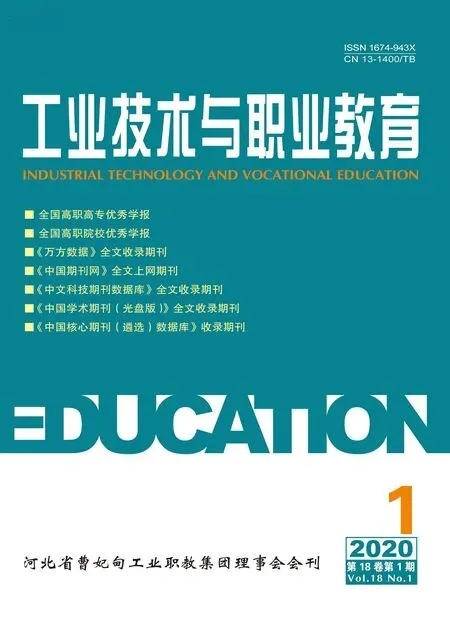
机器人快换工作台是一套智能制造系统中重要的组成部分,其功能是放置不同种机器人快换手爪。在智能化生产的排产中,往往会频繁的切换工件类型,这就不仅仅需要机器人在程序上自动判断工件类型并快速更换夹具以完成各类工件的上下料工作,同时在硬件上应结合实际工况完成相应结构配套。为保证机器人每次更换手爪时的示教精度问题,在结构设计上工作台与机器人行走机构的大底座精准固定对接,采用双定位销结构以在最大程度上确保机器人与夹具工作台的相对位置不变;为监测各手抓是否放置到位,每个位置配置手爪放置到位检测传感器,将当前有无手抓信号反馈给PLC总控系统。
本文基于智能制造理念构建的智能制造平台将实现3种不同类型工件的快换操作,即φ35圆料、φ68圆料和80X80方料;在实际应用时可根据生产需求,设计多种快换夹手。

图1 工作台整体布局
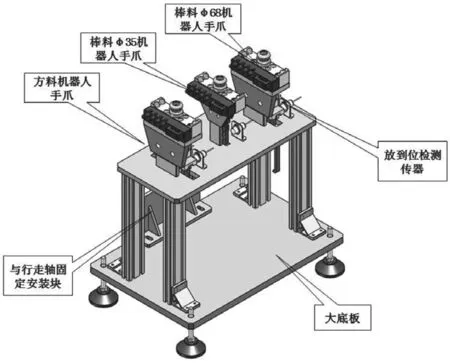
图2 工作台示意图
1.2 机器人快换夹持系统
工业机器人快换夹持系统是与机器人本体紧密结合的部分,由1套机器人侧快换装置(固定安装在机器人法兰端不动)和3套工具侧快换手爪(根据排产工况随时更换)组成,实现3种机器人手爪的快速更换。机器人侧快换装置具备握紧、松开、有无料检测功能,并具备良好的气密性。机器人连接法兰安装到机器人第六轴端部法兰,电模块和气模块分别实现快换手爪与机器人侧快换夹持系统电信号的通讯和气路的连接。同时机器人侧快换装置在设计上配备RFID读写器(配套的RFID 标签安装到料仓各工件位置处),实现对料仓地盘点及有无料的读写功能,与MES智能制造管理平台实时通信,如图3所示。
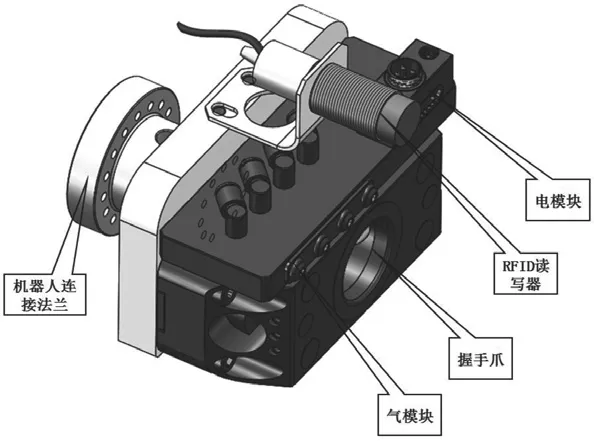
图3 机器人侧快换装置示意图
每套工具侧快换手爪配置有扩散反射型光电开关,可检测机器人手爪有无抓取工件状态,电模块和气模块分别实现与机器人侧快换夹持系统的电信号的通讯和气路的连接,主体结构采用配备双磁性开关的气缸实现工件的抓取和放开,主控PLC实时采集气缸是否加紧或张开到位状态以及有无料状态,并与机器人实时通信,3种快换手爪结构分别如图4、5所示。

图4 工具侧方料手爪示意图
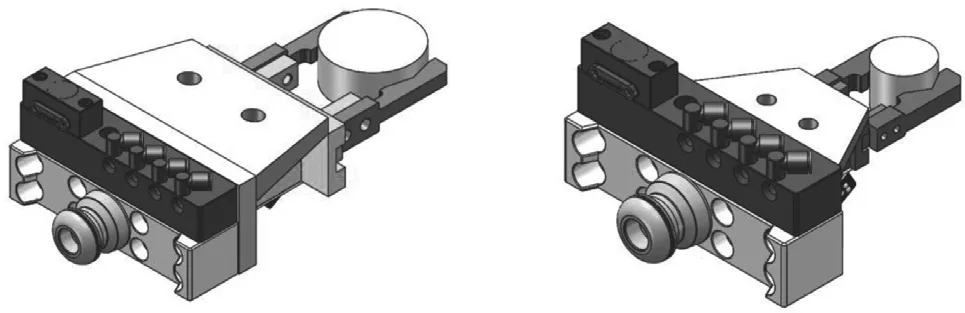
图5 工具侧棒料手爪示意图
2 机器人夹手快换程序的实现
2.1 逻辑性判断
PLC对机器人的控制即与机器人的通信经由MES智能制造管理平台实现,机器人是否需要更换夹手、更换哪个夹手由MES系统统一调度并经由机器人程序判断实现。当机器人收到总控PLC由MES平台发来的换爪指令后,首先需要进行逻辑性的判断,即是否需要更换手爪、需要更换第几号手爪等,这些逻辑性判断在机器人程序中实现。针对本平台系统,大致有如下几种情景:1)如果机器人侧没有手爪,则程序直接调用换爪程序,根据总控发来的指令去更换指定的手爪;2)如果机器人侧有手爪但不是需要的手爪,则主程序先调用放爪程序,将现有手爪放回工具侧指定位置后再调用换爪程序,根据总控发来的指令去更换指定的手爪;3)如果机器人侧有手爪且正是需要的手爪,则不用调用换爪程序,直接往下执行主程序即可。
2.2 手爪快换程序
手爪快换子程序涉及到放爪子程序和换爪子程序2个。比如当前机器人侧手爪号为1,而系统发来的命令是抓取2号工件,则在机器人程序上首先调用放爪子程序E1,完成放爪任务后再调用换爪子程序E,将机器人侧更换为2号手爪,然后再往下执行主程序其他指令。
主体示教程序(main)如下:
IF IR[10]=0 THEN “没有爪则直接换”
CALL E “调用换爪程序”
END IF
IF IR[10]=1 AND IR[21]<>1 THEN “有1号爪且需要换其它爪,先放回再换”
CALL E1 “调用放爪程序”
CALL E
END IF
……
在机器人示教器中完成程序编制如图6所示。
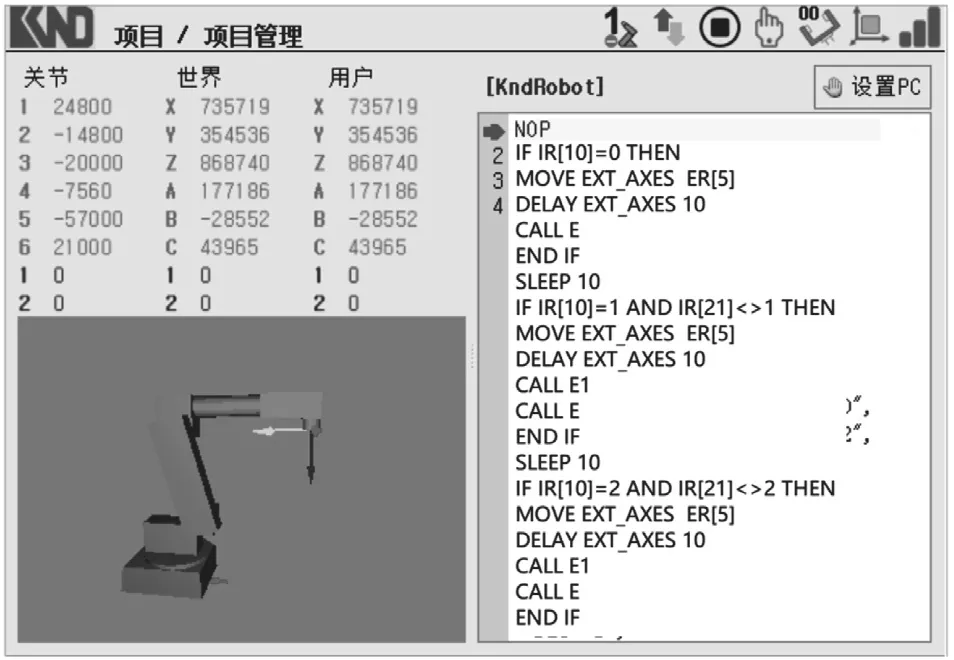
图6 快换主程序
在主程序循环过程中,当条件满足时会自动调用换爪子程序,在换爪子程序中比较关键的是换爪精确点P1的判断,也就是说当机器人收到不同指令时会得到不同的换爪位置,即P1会赋不同的值。例如,主控程序给机器人的指令是换1号爪,则机器人程序中P1的赋值数据就是1号爪正上方的位置信息,此过程的完成需要主控PLC与机器人之间相互通讯。
换爪子程序(sub)如下:
P1点计算
IF IR[21]=1 THEN
P1 = LR[31] “ 1号爪精确点”
END IF
IF IR[21]=2 THEN
P1 = LR[30] “2号爪精确点”
END IF
……
IF IR[21]<>0 THEN
MOVE ROBOT JR[12] “快换过渡点”
MOVE ROBOT P1+LR[10]
MOVES ROBOT P1 VTRAN=130 “快换精确点”
MOVES ROBOT #{0,0,15,0,0,0} ABS=0“开始更换手爪”
……
在机器人示教器中完成程序编制如图7所示。
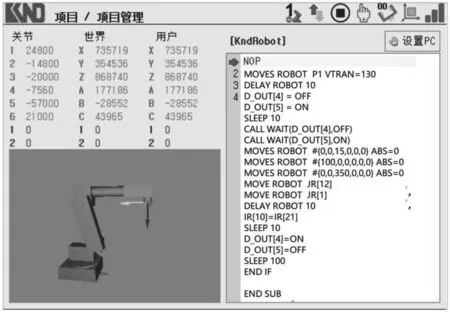
图7 快换子程序
在快换子程序中,P1点为工作台正上方各夹手对应的快换精确位置,在机器人程序中通过公式计算自动赋值。通过以上示教程序,实现了本系统的手爪快换功能。
机器人手爪快换程序的实现是整个智能制造环节中比较关键的一步,确保了生产系统的智能化。同时,合理、精简的机器人快换程序也是整个智能制造系统处于高水准的有力保障。
3 结语
本文基于智能制造理念,借助三维设计软件完成了机器人快换夹具结构设计,包含快换夹具工作台和机器人端快换夹持系统部分,并基于机器人编程语言通过示教编程实现了机器人端夹具的自动快换功能。本文搭建的系统可作为智能制造系统的重要单元,对于智能制造系统的研究应用起到一定的理论推进作用。