满足DP3动力定位要求的综合电能系统设计分析
2020-04-01贾颖晖韩朝珍
贾颖晖, 韩朝珍
(上海佳豪船海工程研究设计有限公司,上海 201612)
0 引 言
以综合电能系统技术为代表的新型船舶已逐步成为当今高技术动力系统船舶发展的主流趋势。电力推进是船舶动力系统的一种特殊传动形式,是在综合利用能源的需求牵引下,将船舶动力系统与辅机电站系统合二为一的综合性技术[1-3]。电力推进的综合性船舶电站通过现代技术可实现能源最佳利用,延长原动机的使用寿命,并满足绿色环保港口要求,在提高船舶操作灵活性和运行效率的同时,达到了降低能耗和减少废气排放的目标[4-6]。综合电能系统的优势在配备有多个推进装置的具有动力定位能力的船舶上体现得更加充分。
动力定位(Dynamic Positioning,DP)是指凭借自动和/或手动控制的水动力系统,使船舶在其作业时能够在规定的作业范围和环境条件下保持其船位和首向[7-8]。DP3是指安装有动力定位系统的船舶,在出现单个故障(包括由于失火或进水造成一个舱室的完全损失)后,可在规定的环境条件下,在规定的作业范围内自动保持船舶的位置和首向,是动力定位系统中最高等级。
1 项目概况
本文以烟台打捞局5 000 t起重铺管船为背景工程,对综合电能系统的方案设计作具体分析。5 000 t起重铺管船是具有动力定位和锚泊定位能力的自航全回转起重铺管船。5 000 t起重铺管船效果图如图1所示。船尾设置了1台具有5 000 t起重能力的大型海洋工程起重机。该船可用于水下沉船、沉物的抢险救助打捞作业,具有应对突发事件、进行大吨位水下物体整体打捞、快速清障的能力。
综合电能系统方案设计分为配电系统结构设计、电力负荷分析、接地方式选择、电压等级选择、短路电流计算、谐波分析与抑制、电力系统潮流分析和电站管理系统功能等8个部分。
2 配电系统结构设计
根据全船负载情况及总体需求,确定系统的网络结构是进行综合电能系统设计的第一步。该船不仅有航速的要求,而且用电设备众多,如大型全回转起重机、主要作业设备、动力定位系统、锚泊定位系统、日常生活设施等都需要电力供应,作业时电能消耗十分巨大。鉴于航行时不作业、作业时不航行的特点,该船推进方式采用全电力驱动,以提高装船动力装置的利用率。
船舶安全系统按照36人以上客船要求设计,并且需要满足《国际海上人命安全公约》中安全返港条款的要求,即当任何舱室遭受火灾或浸水受损后,规范所要求的推进、通信、报警等系统仍能维持工作[6]。所以两个主推进器、发电机组及配电设备需要作A60防火及水密分隔,以避免任何推进器舱及机舱损失后造成全船动力丧失及安全系统无法工作。
该船设置DP3动力定位系统。为了满足动力定位最大单点故障及船舶定位能力要求,设置4个独立的机舱,各机舱之间都具有A60防火及水密分隔。每个机舱内的发电机组、配电板及辅助系统可独立运行。在DP3工况下,4块配电板之间的联络开关全部闭合实行联网运行,提升整个配电系统能量的合理应用,电力系统示意图如图2所示。
当在航行模式下,各配电板之间的联络开关又可合闸,此时任意2台发电机运行就可提供2个主推进器及日常生活所需要的电力供给,充分提高了船舶航行的经济性。
3 综合电能系统关联设计
3.1 电力负荷分析设计
船舶电力负荷计算是根据全船用电设备的数量、负载和使用情况进行的,计算结果可作为选择发电机容量和台数的依据。因此,电力负荷计算的结果直接影响发电机容量及台数的选择,也将直接影响全船用电设备的运行、船舶航行安全及人命安全。电力负荷计算的基本构思是计算船舶各工况下用电设备所需的功率。目前常用的电力负荷计算方法有:需要系数法、三类负载法、日夜负载法、概率分析计算法、算式计算法、以某项特重负载为基数的计算方法等[1]。目前应用较多的是需要系数法,只要需要系数、同时系数选取恰当,就能够得到较准确的计算结果,所以电力负荷计算采用需要系数法进行计算。
电力负荷分为正常航行工况、进出港工况、海上停泊住宿工况、港口停泊工况、锚泊起重工况、DP3起重工况,其中DP3起重工况又可分为推进器全在线工况及最严重故障模式工况。通过对各工况进行电力负荷计算,最终确定电站组成方案为6台额定功率为6 680 kW的主发电机组、1台额定功率为1 500 kW的停泊发电机组及1台额定功率为640 kW的应急发电机组,以确保在各工况下电站始终运行在最经济及安全的负荷率。电力负荷计算结果如表1所示。
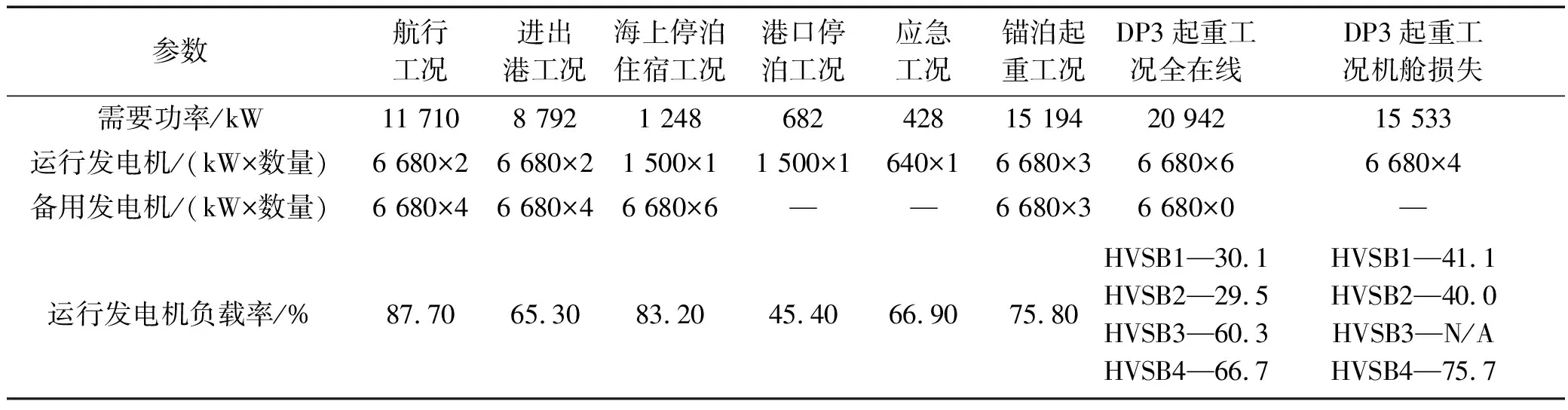
表1 电力负荷计算结果
3.2 接地方式选择
电力系统采用的是三相三线中性点经接地电阻接地的系统。中性点是否接地及接地方式是一个涉及电力系统多方面的综合性问题。在选择中性点接地方式时,需要考虑供电可靠性、电力系统的过电压与绝缘配合、继电器保护要求和电气安全性等。中性点接地形式优缺点对比如表2所示。
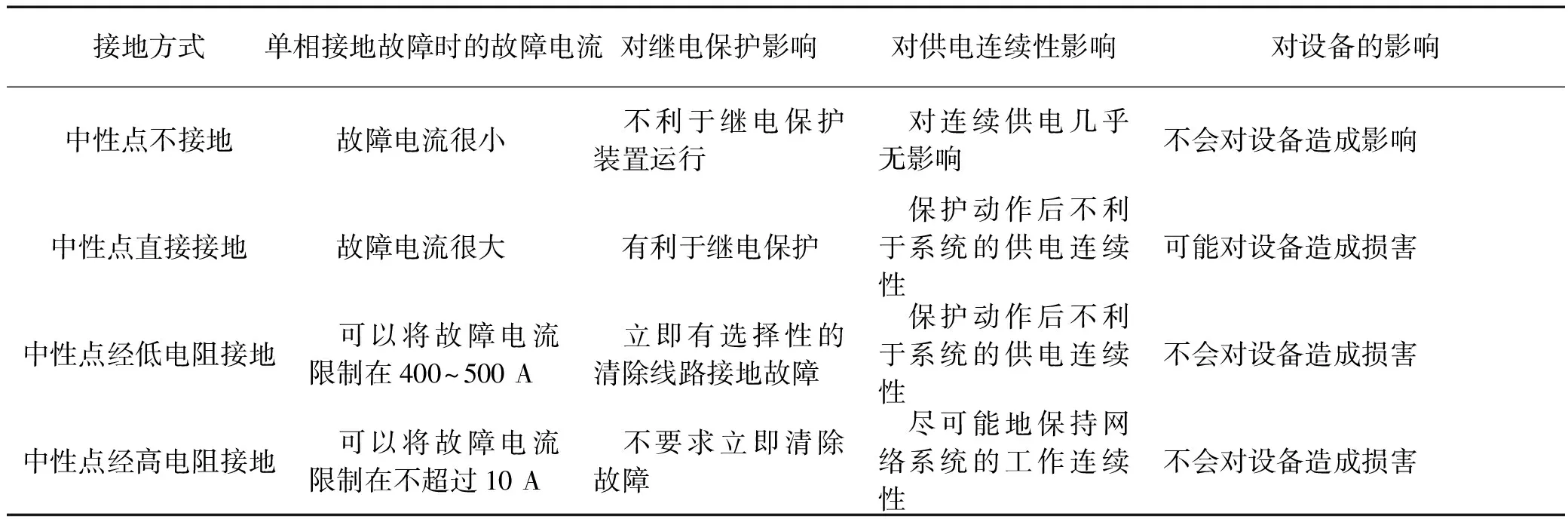
表2 中性点接地形式优缺点对比
对于船舶电力系统来说,安全性是第一要考虑的因素。船舶不同于陆上装置,一旦电力系统出现故障或者人员受到伤害都可能是致命的。从经济性来考虑,不接地方式是较为理想的一种方案,在船舶上确实得到广泛应用。但当全船高压系统对地电容电流的值达到一定高的程度时,不接地系统呈现过电压会比较突出,而单相接地故障时会对设备绝缘造成伤害,所以选择三相绝缘和中性点经高阻接地系统,最大程度地保障船舶的安全性。
3.3 电压等级选择
合理的电压等级选择必须要保证船舶电网在符合各种技术约束的前提下满足负荷需求,并使得输配电设备容量得到充分利用。同时,选择更高电压等级时也必须考虑船舶设备科技水平的支持。对电力系统电压等级的选择,必须综合考虑系统容量、负荷水平、系统结构和设备性能,过高或过低都不合理。
在大型船舶上如果使用低压供电系统,由于其电缆线路较长,将会存在损耗和电压降过大的问题。因此,无论从供电能力、供电距离还是线路损耗,低压配电已经难以适应负荷发展的要求,从而影响船舶电力系统的正常运行。理论上低压交流系统(如AC 400/450/690 V)汇流排短路电流半周期有效值Iac的极限为135 kA,当短路电流Iac超过135 kA时必须选用高压交流电力系统。根据实际使用经验来看,100 kA已经是标准低压配电设备的上限。由此可见,一定的电压等级是由一定的电网容量和供电负荷的大小决定的,当电力系统容量达到一定数值以后,采用高压交流电力系统(3.3/6.6/11 kV)是一个合理的选择。
根据电力负荷计算的结果,该船配置有6台额定功率6 680 kW发电机组可并联运行,所有推进器采用变频驱动。若采用3.3 kV,系统的短路电流约为60 kA,超过了主流配电设备短路电流容量的限制。如果采用大容量非标准的高压交流配电板,既不经济,也不安全。若采用6.6 kV,系统的短路电流约为30 kA,尚未超过主流配电设备短路电流容量的限制,可以采用31.5 kA的标准产品。如果电站容量进一步增大,则可以考虑选用11 kV或更高的电压等级。
虽然该项目的用电负荷较多,但除了推进电机、吊机、锚泊定位装置外,其他电气设备的功率通常不超过1 MW,假如统一采用较高的电压等级,则很不经济。因此,主电源与大型电气设备以采用不同的电压等级为宜。由于采用了降压变压器,更有利于降低短路电流水平,进一步提高了经济性和安全性。
综上,电力系统采用多级电网分配。AC 6 600 V:供应电站电源设备、推进系统主设备;AC 690 V:供应工程作业设备等。
3.4 短路电流计算
由于短路发生后系统总阻抗减小,船舶电力系统中的短路电流值可达额定电流的数倍,甚至数十倍。计算短路电流是为了解决以下问题:选择校验电气设备、选择和整定继电保护装置以及选择供电系统的接线和运行方式,从而使供电系统安全、可靠运行,减小短路所带来的损失和影响。
该船故障电流计算按照IEC 61363 标准并基于一些设备参数,包括发电机额定电压、发电机视在功率、系统频率、发电机数量、发电机功率因数、直轴超瞬态电抗(饱和)、直轴瞬态电抗、变压器容量、变压器数量(最大低压电机负荷)、变压器总负荷、假定所有负荷占变压器容量的百分比及假定在故障发生时运行的低压电机负载比例等,并基于起重机、定位锚、推进器由变频器驱动故不产生故障电流(无再生发电能力)条件下,通过短路电流计算,可获得该船最大3相故障电流。最大3 相对称故障电流(包括主电机和低压电机故障作用):28.6 kA;最大3 相非对称尖峰故障电流(包括主电机和低压电机故障作用):77.8 kA。
3.5 谐波分析与抑制
该船采用变频器调速推进系统,在具有优异调速性能的同时也给系统带来了大量的谐波,对电力系统的运行带来极大的危害。对谐波进行有效治理的前提是,确定谐波源并准确计算各次谐波的含量,并在此基础上提出有效的治理方案,确保将系统的谐波含量控制在规范及系统允许的范围内。
该船电力系统的谐波源主要为驱动各作业设备的变频器。这些电力电子器件均为非线性负载,在不同运行工况下,运行设备产生的谐波源数量及种类不同,所产生的谐波畸变率也不同。根据该船的不同运行工况及负载特性,分析谐波源产生原理,确定合适的谐波分析方法,并采用工程化的谐波估算手段对电网谐波进行分析计算,最终采用12脉形式的单台变频器装置,系统构成虚拟24脉形式解决电网谐波。虚拟24脉整流+逆变器如图3所示。
3.6 电力系统潮流分析
电力系统潮流计算是电力系统分析中的一种最基本的计算,是对复杂电力系统正常和故障条件下稳态运行状态的计算。潮流计算的目标是求取电力系统在给定运行状态的计算。节点电压和功率分布,用以检查系统各元件是否过负荷、各点电压是否满足要求,功率的分布和分配是否合理以及功率损耗等。对现有电力系统的运行和扩建,对新的电力系统进行规划设计以及对电力系统进行静态和暂态稳定分析都是以潮流计算为基础的。
DP3起重模式下,电力系统投入运行的设备包括以下设备。
(1) 发电机组:1~6号发电机组。
(2) 配电变压器:1~4号变压器。
(3) 推进器:7号推进器,8号推进器,20%额定功率输出;1号推进器,2号推进器,50%额定功率输出;5号推进器,6号推进器,20%额定功率输出;3号推进器,4号推进器,40%额定功率输出(推进器功率输出率根据动力定位能力报告所得)。
(4) 高压配电板:1~4号高压配电板。
(5) 低压配电板:1~4号低压配电板。
DP3起重模式潮流计算结果如表3所示。
3.7 电站管理系统
功率管理系统(PMS)是电力系统中重要的组成部分。该PMS适用于海洋工程的高电压系统,实现对发电柴油机组电源、推进器系统、吊机系统、铺管系统等大型设备系统的电能控制;同时功率管理系统能够控制高压汇流排及低压汇流排联网或分网运行结构。
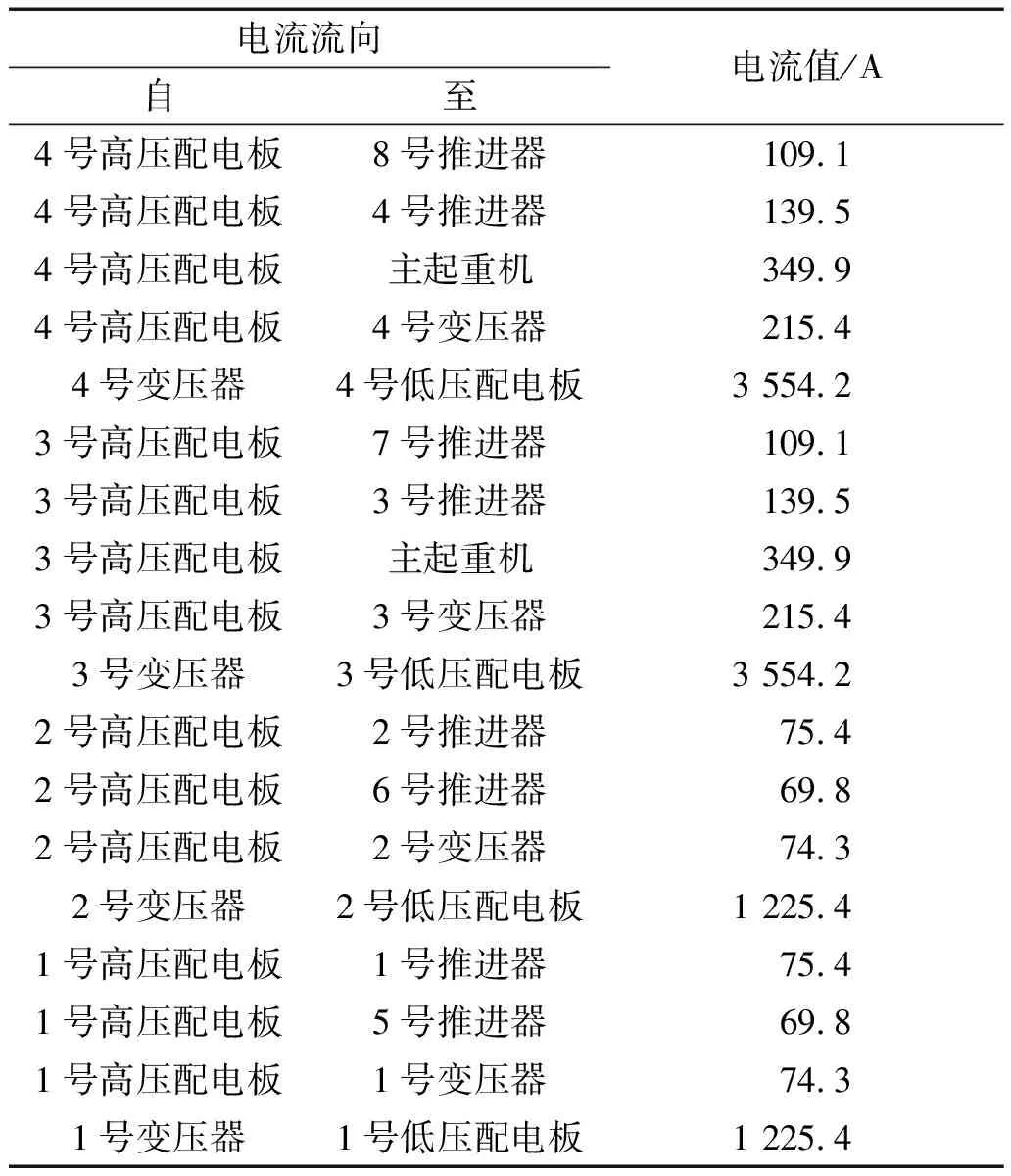
表3 DP3起重模式潮流计算结果
功率管理系统包括以下主要功能。
(1) 柴油机控制:遥控起停,运行时间计算,备用/ 优先级选择,根据负荷起停,全船失电再启动,基于柴油机模式的实时数值,同步(ISO)和下降(Droop)模式选择,下降(Droop)模式下柴油机负载控制等。
(2)运行柴油机报警时备用启动等。
(3)发电机控制:监测发电机和汇流排参数,遥控发电柴油机组同步,发电机负荷分配(平衡、不平衡、固定负荷),频率控制,电网运行构架形式控制,同步(ISO)模式下发电机负载控制等。
(4)汇流排联络开关控制:监测控制汇流排每边的参数,遥控汇流排母联开关合闸/分闸。
(5)重载控制:重载设备的起动请求,负载卸除(非重要负载跳闸),发电机跳闸探测负荷卸载,母排跳闸探测负荷卸载,快速响应电力推进器的负荷限制等。
(6)高级发电机监控:功率管理系统的延伸功能,通常称为下降(Droop)模式/同步(ISO)模式,用于检测柴油机转速和发电机电压故障的控制系统。当检测到发电柴油机组发生故障时,将控制故障的发电机组开关脱扣,以避免故障进一步扩大导致全船失电情况发生。高级发电机监控系统会实时监测机组动态运行参数,通过精准的数学模型计算预测机组的运行状态。当检测到机组发生一级偏离时,将启动1台备用发电机组,同时产生报警。如果参数偏离仍在继续,故障发电机将脱扣。系统将从下降(Droop)模式转换到同步(ISO)模式下运行。下降(Droop)模式/同步(ISO)模式两大主要功能为:下降(Droop)模式是检测柴油机速度控制系统(有功功率分配),同步(ISO)模式检测发电机电压控制系统(无功功率分配)。系统有功功率变化反映在柴油机调速器故障或燃油滤器阻塞;有可能是调速器反馈系统故障造成功率与油门位置不匹配;在下降速度控制系统中这些故障将会被检测到。同步(ISO)模式反映的是发电机提供过多的功率,以下电压控制系统中的故障将会被检测到:过/欠励磁,有可能是由丢失电压反馈给AVR信号造成的;欠励磁,AVR故障;AVR主报警,无励磁。
4 结 语
该项目为典型的采用高压综合电能系统的海洋工程船,电力系统的设计既要满足客船安全返港要求,又要满足动力定位DP3要求,对现代海洋工程船来说具有一定的代表性。
本文主要分析了系统设计初期所需要确定的一些关键参数,通过电压等级选择、接地方式选择、电力负荷计算、系统短路电流计算、谐波分析等并结合船舶本身的运行工况及系统要求来确定综合电能系统的构架,并为以后系统的集成实施提供了支持,也为同类型船舶的建造提供了可行的设计思路。
