智能卫生机器人的设计与研究
2020-03-31蒋鑫沈永楠常浩顾振超焦斯勇窦岩
蒋鑫 沈永楠 常浩 顾振超 焦斯勇 窦岩

摘 要:本文针对公共设施以及一般场所的清洁设计的一款智能卫生机器人,该产品主要通过机械手臂的运动和清理装置的工作配合,外加智能控制系统的指令来解决日常打扫中人工耗时且不能实现全方位清洁问题,而且利用机器代替人工打扫能够有效的减少病毒的传播、扩散。利用智能操作系统与机械式结构结合的技术能够精准的实现清洁工作的要求。底部平衡调节系统能够解决车辆整体平衡的问题。根据不同的清理要求,自动选择清理的工具,并且检测当前的卫生状态来实现多种不同的方案。完美解放了人力,且不占用公共资源。
关键词:智能控制 机械手臂 多功能化 清洁消毒 公用设施打扫
Abstract: In this paper, an intelligent sanitary robot is designed for the cleaning of public facilities and general places. The product mainly uses the movement of the mechanical arm and the working cooperation of the cleaning device, plus the instructions of the intelligent control system to solve the problem of manual time-consuming and unable to achieve all-round cleaning in daily cleaning, and the use of machines instead of manual cleaning can effectively reduce the spread of viruses Diffusion. Using intelligent operating system and mechanical structure technology can accurately achieve the requirements of cleaning work. The bottom balance adjustment system can solve the problem of vehicle overall balance. And a variety of cleaning tools can be automatically selected according to the current state of cleaning. The perfect liberation of human resources, and does not occupy public resources.
Key Words: Intelligent control; Mechanical arm; Multifunctional; Cleaning and disinfection; Utility cleaning
隨着中国人口的不断增多,越来越多的公共设施正在逐渐被开发,如何高效率、自动化、智能化的完成公共设施的清洁是人们一直所需要探索和研究的。智能卫生机器人是一个符合当下的产品,针对目前的公共设施如电梯,银行存取款机等而开发的多功能卫生消毒机器。传统靠人为清理时,需要选择一个特定时间来进行大规模的清理,而且共用场所(卫生间、银行自助存取款机等)中的环境对人体也会造成一定损害,易引发病毒的传染,费时费力并且不能够进行有效的清理。现在通过智能卫生机器人,可以在晚上或者凌晨人不多的情况下,进行工作。既不会占用公共资源,也不需要人力,节约时间且效率高,大大解放了劳动力,对于解决卫生问题有着重大意义。
1 智能卫生机器人的整体结构设计和工作原理
1.1 地面清理装置结构及工作原理
整体由抽水泵、储水箱、污水箱、防护轮、刮板、滚刷、电磁开关阀自动排水装置、专用壳体以及液位传感器装置等组成(见图1)。采用长方体形状,滚刷采用柔性材料,两侧对称分布。壳体与其他部件为螺纹连接,具有很好的连接保护的作用。在壳体上由液位传感器、抽水泵、储水箱和污水箱组成,由抽水泵通过液压传动从储水箱中抽取一定量的水进入装置内部,然后液压传动方式从刮板上方细小喷嘴处出水,洒向地面。底部的滚刷与两侧板通过螺栓连接实现组合,将水渍与脏污卷起,经过刮板与内部气泵共同工作,吸附水渍、脏污到污水箱中,以此循环。清理工作前后,清理装置通过液位传感器监测储水箱中水是否足够,进而判断是否需要加水,同时液位传感器也可以实时监测污水箱中废水的水位判断是否影响机器工作,它们会将机器状况随时传输到电脑终端以便观察。最后排污水时,机器内部电磁开关阀通过内部电磁感应装置自动控制排水。
1.2 机械手臂
机械手臂由底盘、滚轮、机械手、连接组件、酒精棉刷和透水装置组成。手臂的与移动底座通过螺钉连接实现固定,使之具有较好的固连性。在电脑终端通过侦测高处卫生情况后,信号传输给机械手臂执行相应工作,首先机械手通过螺栓连接可以实现大幅度的伸长与缩短,在遇到一些特殊的角落也可以轻松触碰。随后,连接部位上装备的透水装置和酒精棉刷开始互相配合工作,连接部位与机械手内部具有滚珠通过滚动连接可以实现360°旋转。透水装置内部装有微型液压水泵,可以喷洒一定范围的水雾,同时酒精棉刷材质也具有强力的吸水性能,它与连接部位通过吸附式的结构进行组合,不需要多次更换。整个机械手臂也可通过转动装置里的滚轮的滚动连接实现自由旋转,可以实现大范围转动。
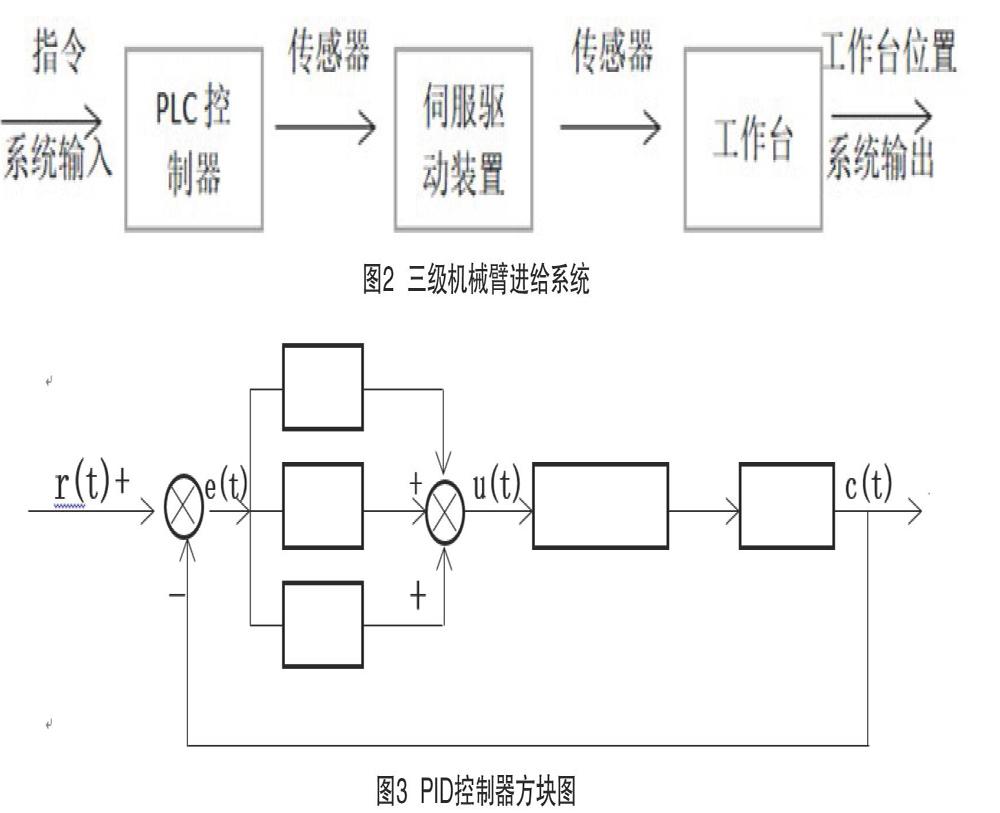
1.3 三级机械臂
三级机械臂的设计中,主要包括PLC控制器,监控系统,以及伺服驱动装置,多个传感器模块(见图2)。通过监测系统观察清理环境,机械手臂的运动状态通过以太网采集,获得有效数据,完成与工作环境的实时交换,由多个传感器接收处理,视觉信息处理反应给电脑终端,通过对照分析由终端给出清理方案,信号传达给机械臂上执行模块,伺服驱动装置启动从而使机械手臂获得规定的运动轨迹,完成三级机械臂的运动。
1.4 整体装置的具体实施流程
清理卫生时,电脑端下达命令,机器自动行进指定的公共设施中。机器通过机械手臂中感应装置检测环境中的卫生状况反馈给电脑终端,进行数据匹配,然后传输指令给机器通过车轮移动到指定的区域。车轮用了减震效果显著的柔性材料来增强抓地力,同时具备良好的支撑作用,保护上方的清洁装置不受影响。到达目的地后系统将通过电脑终端指示清理装置和酒精棉刷)开始进入工作状态。首先通过三级机械臂的往复运动(机械臂通过各部分的螺栓连接实现组合)将清理装置平稳放置在需要清洁表面上,随后清理装置将会通过内部红外线侦测地面状况开始进行清洁,烘干等步骤。底部的滚刷会通过四个方位的移动来进行清洁,地面的污水、污渍将会随时储存到装置中的污水箱中,不会二次弄脏地面。底座上的机械手臂同样可以侦测高处的卫生状况且通过转动装置实施360°方位调节并且控制自由机械手的伸缩和移动实现上升或下降达到合适高度,手臂上的透水系统配合酒精棉刷来实现清洁、消毒任务。酒精棉刷清理过程时,不断与清理表面接触表面消毒液体产生消耗、挥发,通过透水系统进行补充消毒水以确保酒精棉刷清理工作有效进行。最后工作完成后机器通过接受终端指令停止运转,自动行出打扫场所。
2 控制系统设计
2.1 卫生机器人整体控制系统的设计
卫生机器人的运动行驶,采用无人驾驶技术,内部由单片机主控电路和电机驱动电路一同组成机器人行驶系统的硬件部分,外部由摄像、红外线感应装置等组成,通过主控电路的核心控制单元来进行算法的处理和信号发送,红外线感应装置采用相机的感光部分接收红外辐射传递的信号,利用模电转换原理,将红外辐射转换成电信号以得到可见光的图片即所需的外部环境数据。
电机的驱动电路是通过驱动电机的转动来实现监测机器人行进过程中的道路状况并且实时反馈给控制芯片,其中红外线感应装置具有避障系统,主要采用的是避障传感器,机器人收到指令行进时,若在计算好的路径上出现障碍物,通过避障传感器发射出具有低频率的红外线,红外线定然会受到阻碍并且会反射回避障传感器内部的接收管接收,通过比较器处理之后,此时的信号输出串口会持续输出一个低电频的信号,可通过电脑终端算法计算其面积,并与数据库中原有的目标形状进行比较,通过这种方式来判断是否为障碍物,若前方为行人,则通过单片机控制语音指令芯片提示前方人员注意避让。当行进路径确实为障碍物时,通过算法计算得出机器人与障碍物此时两者之间的距离。当两者之间的距离小于所设置的最小安全距离时,则运行出对此时状态有效的算法并进行安全的避让,若障碍物体型较大实在无法避让,则机器人立即反馈给用户到现场排除障碍。机器人的工作状态通过调节模块中内部传感器进行实时参数调整,能够适时、准确的反馈给电脑终端以便调整机器人下一步工作。同时平衡机器人的整体受力,防止发生侧翻等意外事故。用户可通过控制系统界面发出指令,内部预设的完整程序进而控制电机正反转实现行驶。机器人上有无线连接装置,可以通过物联网模块连接以太网或局域网,实现在电脑、手机及专业的通讯设备上使用控制。
2.2 平衡系统的设计
由测量系统测量货物质量数值,在微控制器中以PID算法(见图3),并将计算所得数值通过PWM方式传回电动机芯片,告知滑移距离调整配重块的位置,从而完成车辆的前后平衡。行驶中,采用最常使用的PI控制器,芯片根据摄像感应系统收集的数据,计算位置参数,电动机运转使配重块移动的对应位置,电动机调整机器人的运动速度,两者相互配合,使其平稳工作,并且根据感应系统提供的数据实时调整。
3 智能卫生机器人的检验测试
智能卫生机器人经过组装成功后,还需要将其投入实际生活中来进行检验测试,通过在有效范围内给定其有关的指令,观察机器人是否能有效的执行相关指令以及是否能够达到预测的目标。更为重要的是还需严格检查智能卫生机器人的安全问题,例如在使用过程中是否有漏电、漏水、操作失灵等安全隐患。在机器人使用的过程中也要时刻检测,评估机器人的风险,能够在其使用过程中安全无误。若通过各种的检测各项指标都合格,则智能卫生机器人可通过批量生产,可以运用到我们平时的生活中。
4 结语
随着智能的时代发展,提高工作效率,利用机械来代替人工来完成具有一定危险性工作已经成为常态。本研究项目,通过对已有的清理装置进行改良,保留其基本的机械结构,加之以智能系统以及多功能机械手臂,可实现对于大多公共设施的自动清理任务。完美解放了人力,且不占用公共资源。
参考文献
[1] 吳振磊,孙二威,李笑笑.一种基于PID算法的自平衡车控制系统设计[J].甘肃科技纵横,2019,48(8):22-24.
[2] 李炜.卫生陶瓷修坯机器人的机构研究[D].唐山:华北理工大学,2016.
[3] 徐治国.家用智能清洁机器人[J].发明与创新:中学生,2019(12):45.
[4] 黄莲花,李光明,林土淦,等.便捷公共卫生智能清洁扫地机器人设计[J].轻工科技,2018,34(9):72-73,75.
[5] 殷鹏. 用于社区卫生服务中心巡查的小型移动机器人的研究[D].哈尔滨:哈尔滨理工大学,2018.
[6] 常浩,顾振超,窦岩,等.智能工业搬运机器人的设计与研究[J].科技创新导报,2020,17(15):69,71.
