基于差分定位的输电线路多旋翼无人机智能巡检研究
2020-03-30严玲玲闻铖王身丽方权侯金华
严玲玲,闻铖,王身丽,方权,侯金华
(湖北省电力有限公司检修公司,湖北 武汉 430000)
智能电网建设对输电线路巡检系统性能提出了更高的要求,当前输电线路运维多采用无人机巡检方式,但仍需依靠人工操控实现巡检过程控制,无法保障巡检效率与质量。基于此,本文运用载波相位差分技术设计出一种无人机智能巡检系统,可有效排除人工操作的不确定因素,实现无人机巡检的标准化、智能化。
1 基于差分定位的多旋翼无人机智能巡检系统设计
1.1 RTK差分定位技术
以往无人机巡检多采用GPS进行定位,然而,在输电线路近距离巡视作业中易在电磁干扰的影响下引发碰撞甚至坠机事故,无法保障输电线路巡检作业效果与安全性。在此采用RTK载波相位差分技术进行巡检系统优化设计,在基站与机载接收机间实现载波相位信号的传递,求差解算坐标后生成巡检结果,其精度可达到厘米级。将RTK差分定位技术应用于多旋翼无人机智能巡检系统设计中,配合可见光云台相机等任务设备,可在强电磁干扰作业环境下获取高精度定位数据与高清晰度图像,实现对输电线路杆塔本体及通道的智能化巡视,为电网巡检效率、质量与稳定性的提升创设良好保障。
1.2 多旋翼无人机巡视规则学习算法
在考虑到架空输电线路所处的复杂工况条件与不同塔型等因素的影响下,应确保无人机巡视规则、作业方法的适应性与兼容性,围绕以下两个层面进行算法设计。
(1)机器学习分类算法。该算法以样本的属性、特征作为分类依据,针对特定属性的值进行预测,完成类别划分。当前主要采用逻辑回归算法作为分类算法,设样本为,指样本塔,是m维样本特征向量;y代表是否属于某塔型,取值为0或1。针对样本塔属于某一塔型的概率进行判断,设为塔的特征向量,θ为的回归系数,σ为函数,则其逻辑函数可表示为:

将该算法应用于多旋翼无人机智能巡视系统设计时,需先完成模型的设计,明确塔型属性、数据与属性的类型、完成样本属性分析,进而运用该逻辑回归算法进行预测,确定塔型所属的具体类别。
(2)断点续飞算法。该算法以统计学原理作为参考,针对统计数据进行数学处理后提炼出其中的自变量、因变量,依据其关系建立回归方程,实现对因变量变化情况的预测分析。倘若无人机在自动执行巡检任务的过程中突发航飞中断事件,通过获取其之前航飞过程中的位置变化数据进行推算,即可确定返航位置,保障航飞任务的顺利进行。设无人机航飞轨迹为自变量、返航位置为因变量航飞位置的类自变量为返航位置的因变量为回归参数为则其线性回归方程式可表示为:

1.3 多旋翼无人机智能巡检系统设计
(1)系统结构。在多旋翼无人机智能巡检系统结构设计上,主要分为以下两部分:其一是天空端,主要由大疆四轴多旋翼无人机、RTK模块与可见光云台相机等任务设备组成;其二是地面端,主要由地面站、RTK基站、自动巡检软件组成。首先需完成飞行航线的规划设计,确定航点、巡检点的具体坐标,依托飞行控制文件中记录的信息完成巡线航迹的绘制,提取自主飞行与航拍控制点的位置信息,并依据时序控制无人机顺序遍历各飞行航迹控制点,待到达航拍控制点后,则调节摄像头进行航拍,得到具备较高精度的航拍图像与信息,依托多旋翼无人机实现对输电线路杆塔的智能化巡检。
(2)系统硬件设计。首先是无人机的选取,无人机作为杆塔智能巡检的主体平台,负责执行航飞任务、执行航行指令,搭载可见光云台相机等任务设备。基于输电线路杆塔的智能化、精细化巡检作业要求,采用大疆四轴多旋翼无人机作为飞行设备,该无人机可支持悬停、低速巡航,飞行时间不少于30min,最大有效载荷为1.72kg,可在能见度不低于30m的条件下保持正常作业飞行,抗风能力达到6级以上,实现飞行状态、任务模式的灵活切换,可适应-10~40℃的温度环境,具备自主起飞降落、自动返航、低电压保护等功能,兼容等多种云台。
再次是任务设备的选取,选用可见光云台相机记录输电线路杆塔信息,该设备采用传感器,有效像素为2080万,具备连续可调光学变焦功能,可在与杆塔间隔10m距离处获取高分辨率图像,能够检测到销钉级缺陷,且具备良好的防抖性能,保障在大风作业条件下仍能够拍摄到高清晰度照片。
最后是地面站的设计,操作人员可在地面站利用智能操作系统实时获取到无人机的航行信息,其中控制终端基于系统开发,具有32G储容量、6.8寸屏幕,能够满足IP67防护等级需求,控制无人机实现自主巡视。
2 输电线路杆塔智能巡检测试
2.1 试验区域与设备选取
为检验该智能巡检系统的巡检精度,选取大疆四轴多旋翼无人机针对某电网公司管辖范围内的220V输电线路10~14号杆进行自动化巡检测试,巡视线路总长度约为15km,其中搭载有云台相机与热红外成像相机。在实验过程中收集无人机在巡视航线过程中拍摄到的各飞行航点的信息,获取其位置信息、云台角度等参数并与学习模式下的基础参数进行对比,判断二者间的精度差异。

2.2 试验结果分析
选取无人机第一至三次自动巡线测试结果进行分析,将自动巡视过程中获取的飞行航点坐标与学习模式下进行对比,建立精度折线并检验其误差,以此判断搭载RTK模块的多旋翼无人机在自动巡检过程中的定位精度。由于在试验过程中发现其中的某一杆塔位置靠近地面RTK基站,其误差数值与基站间隔距离的变化成正比,在1km范围内的误差精度不超过1m。在此过程中,需注重加强对智能巡检软件的综合利用,合理评估拍摄过程中存在的容错预留空间,避免因误差的线性递增导致拍摄目标发生偏移。在本试验中采用热红外成像相机拍摄到的图像数据如图1所示,经由数据综合对比得出,在输电线路杆塔与基站间距离超过1km,无人机与杆塔间距离约为5m,且无人机与拍摄目标呈垂直关系时,应将容错预留空间控制在5cm以上,方可确保被拍摄目标图像不会超出画幅范围之外。总体来看,采用多旋翼无人机搭载RTK进行输电线路杆塔的自动巡检,可在强电磁环境下仍能够顺完成定点拍摄任务,提高定位精度,满足输电线路的智能巡检需求。
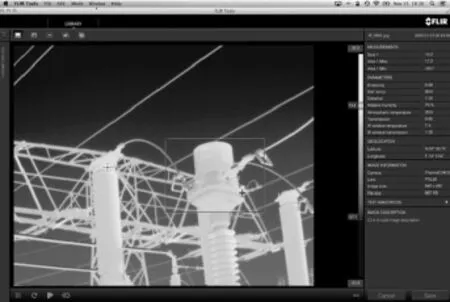
图1 热红外成像相机拍摄到的图像数据
3 结语
本文基于RTK差分定位技术设计出一种多旋翼无人机智能巡检系统,致力于实现对输电线路杆塔的自动化、精细化巡视。通过针对大疆四轴多旋翼无人机搭载RTK开展杆塔智能巡视所获取的信息进行分析可以发现,该系统在强电磁场环境下仍可顺利完成定点拍摄巡检工作,具有良好的应用价值。