基于机载组合导航数据的雷达探测效能评估方法研究*
2020-03-30白瑞阳
徐 琳,白瑞阳
(1 中国航空研究院,北京 100029; 2 95910部队,甘肃酒泉 735018)
0 引言
自海湾战争以来,超视距(BVR)空战已成为信息时代空战对抗的主流形式。作为支撑超视距空战的关键传感器之一,机载雷达的探测精度直接决定着空空导弹的制导精度,进而影响空战结果,越来越受到人们的高度重视[1]。目前,对机载雷达探测精度的评估手段比较单一,主要利用机载雷达探测数据与高精度雷达探测数据进行对比分析评估,评估周期较长、精度有限,且组织实施不便[2]。考虑到组合导航系统精度不断提升,其定位精度已大大优于机载雷达探测精度,利用组合导航定位信息评估机载雷达探测精度,可准确分析雷达探测误差规律,真实反映雷达品质[3]。文中综合处理GNSS/INS组合导航定位数据与机载雷达探测数据,探究速度、高度等因素对雷达探测误差的影响规律,提出一种基于日常训练数据的机载雷达探测效能评估方法,可从多维度综合分析误差规律,为进一步提高雷达精度提供支撑。
1 雷达探测效能数据处理方法
雷达载机以及惯性导航系统给出的位置信息为WGS-84坐标系中的经度、纬度、高度(L,B,H)。而雷达坐标系下,目标机的位置是雷达探测的距离、方位、俯仰(R,A,E)。因此需要进行坐标转换,将目标机的经纬高转换为载机雷达坐标系的距离、方位、俯仰,以便评估雷达的探测效能。
1)将载机和目标的经纬高(L,B,H)转换为地心直角坐标(x,y,z)
WGS-84坐标系是一种国际上通用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向BIH (国际时间服务机构)1984.0定义的协议地球极(CTP)方向,Xw轴指向BIH 1984.0的零子午面和CTP赤道的交点,Yw轴与Zw轴、Xw轴垂直构成右手坐标系。
地心直角坐标系的定义为原点O与地球质心重合,Z轴指向地球北极,X轴指向格林尼治子午面与地球赤道的交点,Y轴垂直于XOZ平面构成右手坐标系。两者之间可以通过式(1)进行转换:
(1)
2)将目标的地心空间直角坐标(x,y,z)转化为载机地理坐标(xg,yg,zg)
载机地理坐标系以载机重心为坐标原点,xg轴位于水平面内,指向正北,yg轴指向正西,zg轴垂直于地平面向下。由式(1)得到的目标和载机的地心空间直角坐标分别为(xm,ym,zm)、(xz,yz,zz),则有:
(2)
(3)
3)载机地理坐标系(xg,yg,zg)转换成载机坐标系(xb,yb,zb)
如图1所示,载机坐标系坐标原点同载机地理坐标系为载机重心,Xb轴为载机机身纵轴,向前为正,Yb轴为机翼展向,左翼展向为正,按照右手坐标系,Zb轴在飞机对称面内,垂直于飞机平面向上。
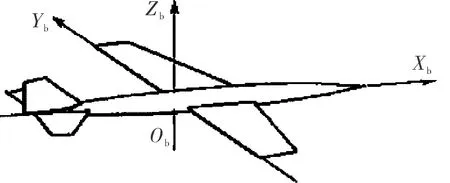
图1 飞机机体坐标系
载机的俯仰角θz为机体轴ObXb与地平面的夹角,飞机抬头为正;航向角ψz为机体轴ObXb在水平面上的投影与地面轴OgXg之间的夹角,以机头右偏为正;滚转角rz为飞机对称面绕机体轴ObXb转过的角度,右滚为正。
由载机地理坐标系转换为载机坐标系按照式(4)进行:
(4)
其中:
Cb=Rx(rz)Ry(-θz)Rz(-ψz)
(5)
(6)
(7)
(8)
4)载机坐标系与载机雷达坐标系之间的转换
载机雷达坐标系由机体坐标系ObXbYbZb绕ObYb轴转过雷达安装角而成。当不考虑雷达安装角时,雷达坐标系与机体坐标系重合。文中暂不考虑雷达安装角。
(9)
(10)
(11)
式中:R为载机与目标的距离;A为目标相对载机机身纵轴的方位角,即R在平面ObXbYb的射影与ObXb正向的夹角;E为目标相对于平面ObXbYb的俯仰角。
2 雷达探测效能影响因素求解
2.1 目标机及载机相对速度、加速度求解
雷达的探测效能除了与目标机距离相关,还与目标机的机动特性有很大关系。目标机及载机速度及加速度分别为(vmx,vmy,vmz),(vzx,vzy,vzz);(amx,amy,amz),(azx,azy,azz)。其坐标系均为该机地理坐标系,因在雷达视距范围内,两机距离较近,忽略两机地理坐标系坐标轴方向的误差[5-6]。则两机相对速度及加速度在地理坐标系下为:
(12)
(13)
将相对速度及加速度转化为载机雷达坐标系则有:
(14)
(15)
由此可得载机雷达轴向相对速度及加速度分别为:
va=vbx
(16)
aa=abx
(17)
载机雷达径向相对速度及加速度分别为:
(18)
(19)
2.2 目标机坐标系下的雷达视线角求解
雷达的探测效能与目标机的RCS值是息息相关的。飞机的RCS是飞机的固有属性,但探测方向不同,RCS不同,如迎头和尾后比侧向要小,而侧向要比上视和下视要小。因此求解目标机坐标系下的雷达视线角,可以反映出此时雷达探测视线与目标机的方位关系,从而反映出不同视线下的RCS对雷达探测效能的影响。
目标机及载机姿态角分别为(θm,ψm,rm),(θz,ψz,rz)。其坐标系均为该机地理坐标系,因在雷达视距范围内,两机距离较近,忽略两机地理坐标系坐标轴方向的误差。则两机相对姿态角为:
(20)
从载机雷达坐标系到目标机体坐标系变换可表示为:
(21)
式中:(x,y,z)为雷达坐标系中任意一点;(xb,yb,zb)为目标机在雷达坐标系中的坐标; (xT,yT,zT) 为点(x,y,z)在目标坐标系中的坐标;P为从雷达坐标系到目标坐标系的变换矩阵,其分量由式(22)确定:
(22)
将雷达坐标原点代入式(5)即可算出转换后的坐标表示,即:
(23)
式中(xT,yT,zT)为转换后的坐标。为了得到其俯仰角和方位角(a,e)还需将上述坐标转换为极坐标,即:
(24)
(25)
(26)
3 测评流程
雷达探测效能的评定方法可简要概括为:以目标机及载机的组合导航数据为标准参考数据,通过与雷达定位数据的测量结果进行对比,得到雷达设备的探测效能,并研究其误差变化的规律。
1)采取相同的时空基准,采集记录载机及目标机的组合导航系统定位数据,并同步记录此时飞机的速度、加速度、姿态角等信息。
2)将雷达稳定截获后的数据进行记录,采用相同的时空基准对其数据进行筛选,统一到同一个时间坐标系下。
3)按照上文所述方法进行坐标变换,把目标机的经纬高等信息转换到雷达参考坐标系,作为标准参考数据。
4)对雷达数据和导航数据进行对比,得出各个时刻的探测误差。
5)进行坐标转换,得到各个时刻对应的相对速度、加速度等影响因素,研究雷达设备的误差变化规律,得到精度评定结果。
4 实验结果
以某次半物理试验台的仿真数据为例,通过对组合导航数据和雷达探测数据时空归一化处理,得到本次实验条件下雷达探测效能分析结果如图2~图10所示。由此得出雷达探测效能的影响规律如下:
1)雷达探测误差与探测距离正相关,距离越大,测距误差越大。
2)雷达探测误差与目标相对径向速度正相关,相对径向速度越大,探测误差越大。
3)在目标坐标系下,雷达探测误差在俯仰角接近90°时较大。
4)相对加速度与雷达探测精度并无明显的对应关系。
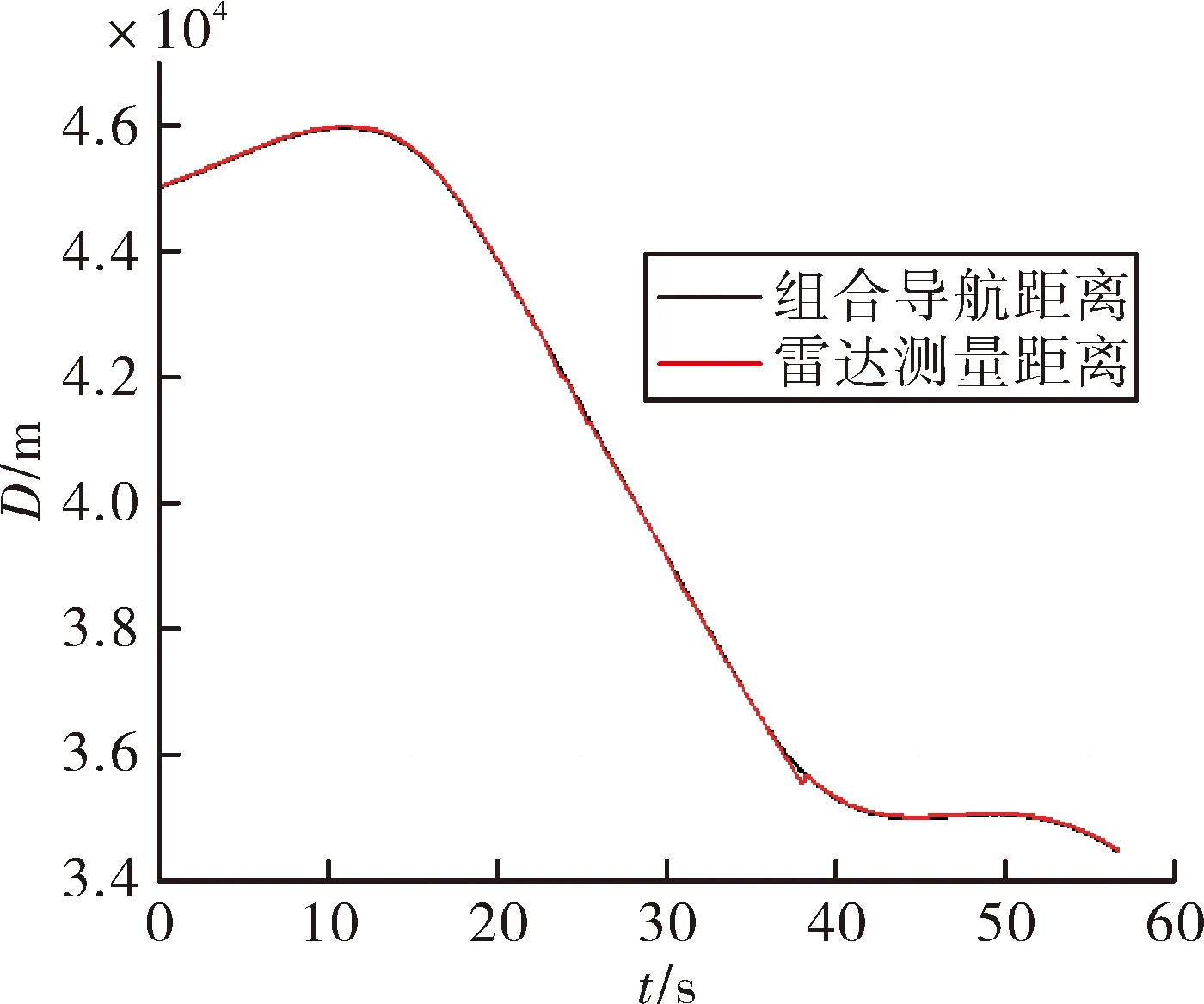
图2 组合导航与雷达测量的目标机距离对比图
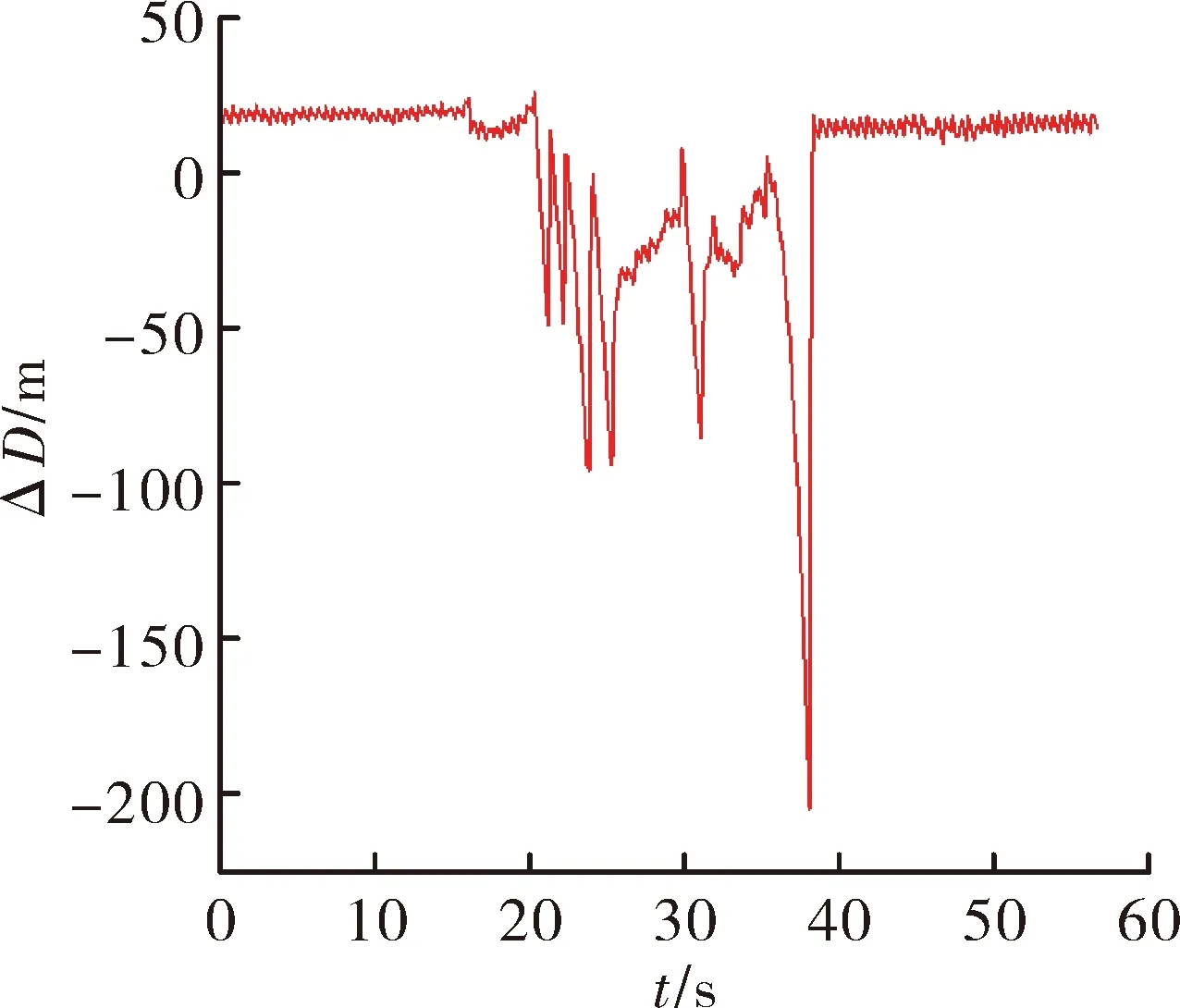
图3 雷达的测距误差图
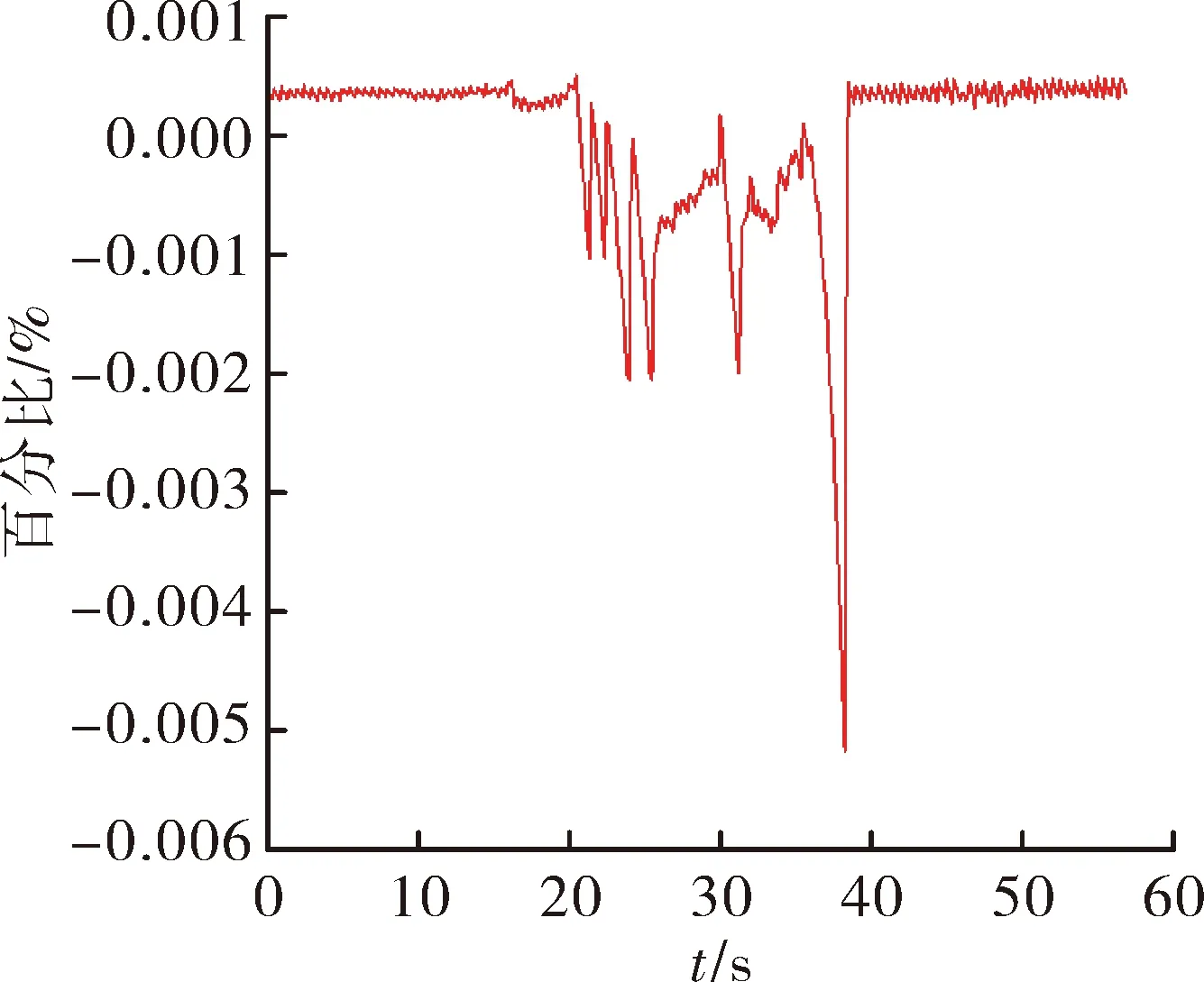
图4 雷达的测距误差与距离的百分比
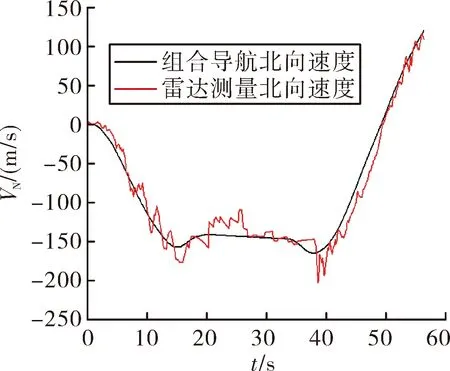
图5 组合导航与雷达测量的目标机北向速度对比图
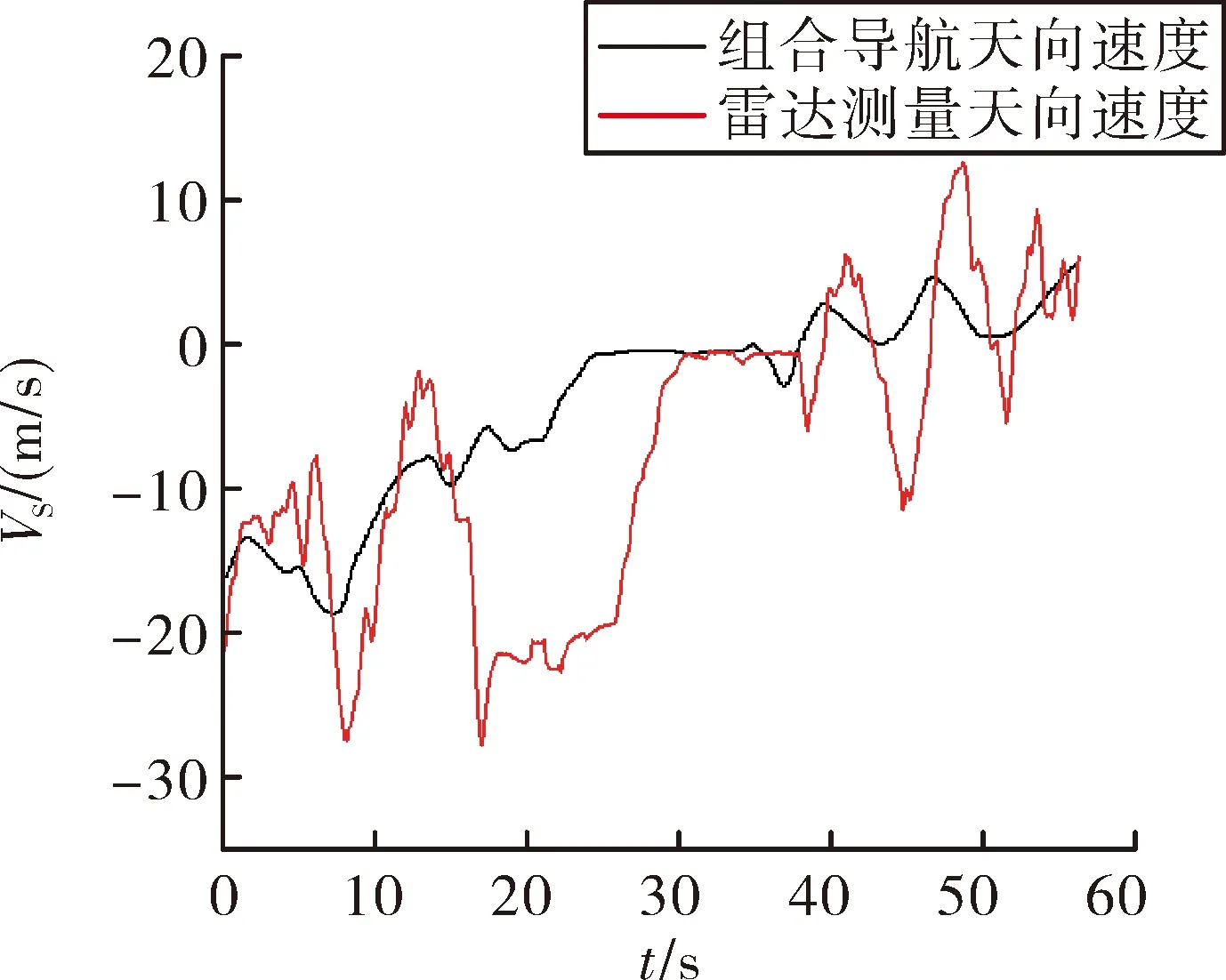
图6 组合导航与雷达测量的目标机天向速度对比图

图7 组合导航与雷达测量的目标机东向速度对比图

图8 目标相对速度图
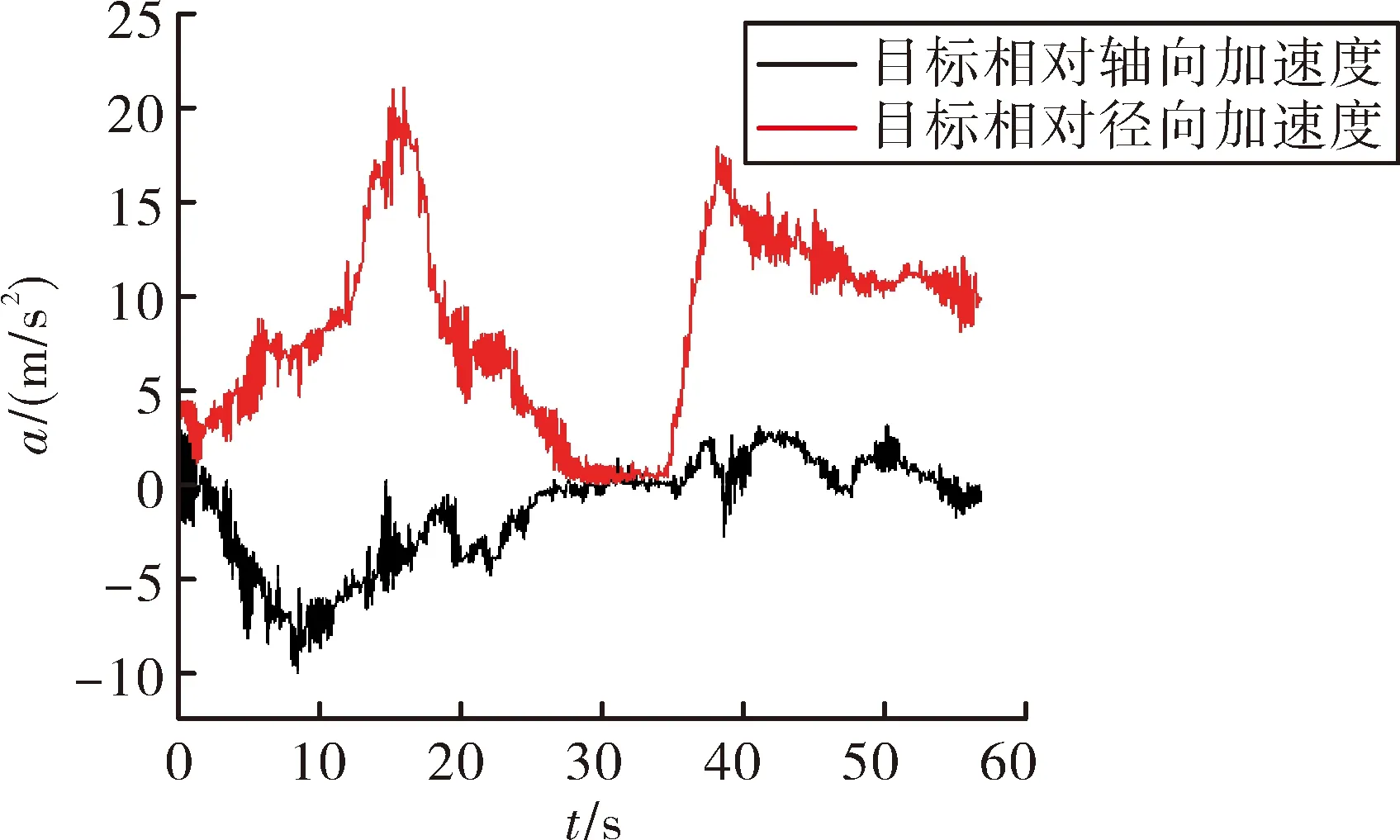
图9 目标相对加速度图
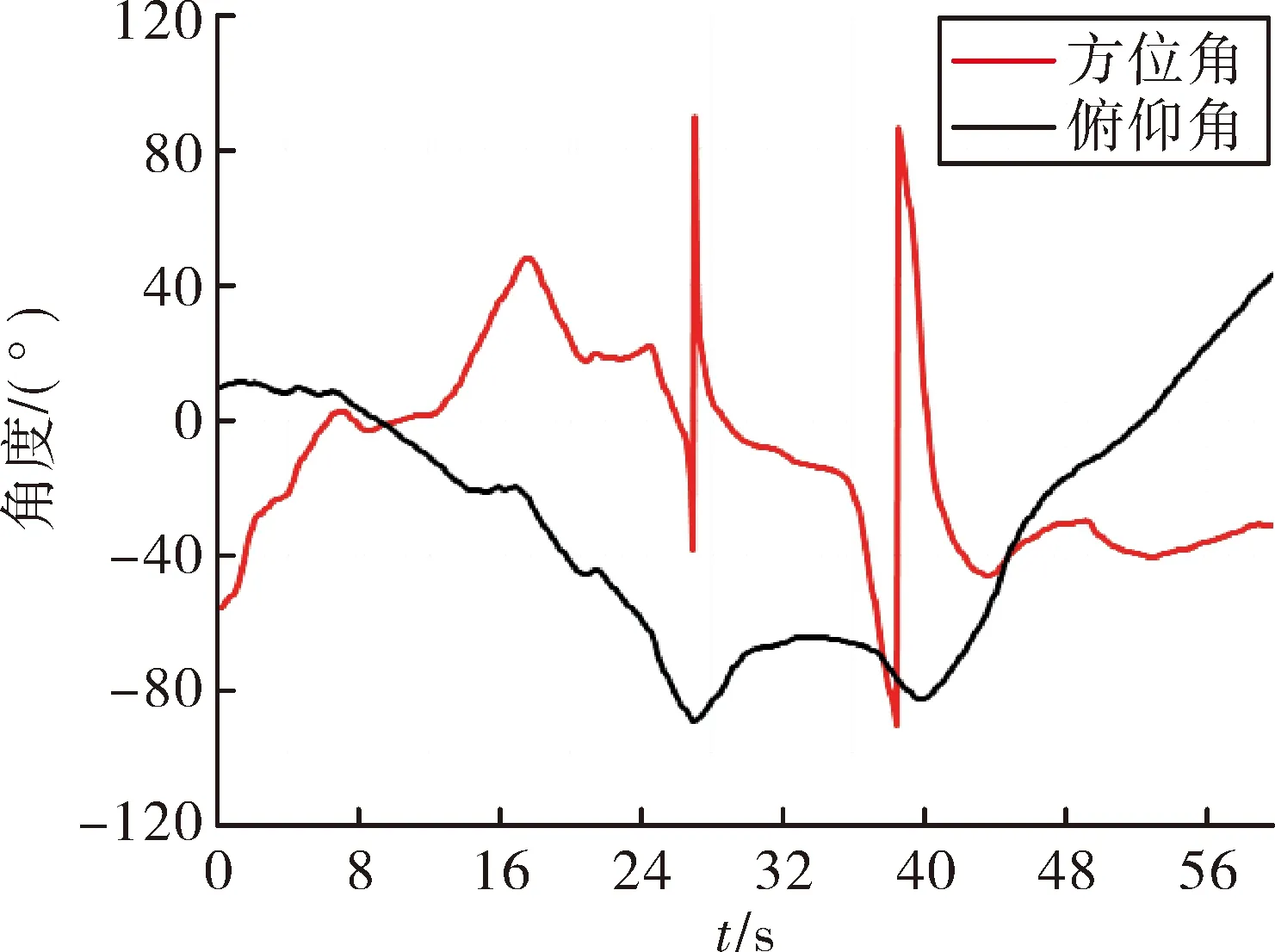
图10 目标坐标系下雷达视线角图
5 结束语
对机载雷达在作训及作战环境的真实探测效能进行了评估并得到了仿真结果。但雷达探测效能是由诸多因素影响决定的,基于本次半实物仿真数据的分析结论还不够全面充分,下一步将扩大样本量,结合仿真数据和实装数据相互印证实现对雷达探测效能的全面分析,为全面评估机载雷达实战效能,进一步提升探测精度提供支持。
