CEEMDAN-PE-TFPF降噪法在齿轮故障诊断中的应用
2020-03-28白丽丽韩振南任家骏
白丽丽,韩振南,任家骏
(太原理工大学机械工程学院,太原 山西 030024)
1 引言
齿轮作为旋转机械系统中的非常重要的组成部件,它的运行状态将影响整个机械设备的健康运转。而由于仪器、环境及人为因素等各方面的原因,其振动信号往往容易受到各种频率的噪声干扰,这些噪声干扰会导致故障特征难以提取,因此为了更好的进行机械系统的故障诊断,需要在提取特征之前对信号进行降噪处理[1]。基于传统傅里叶变换的降噪方法不能同时处理好保护信号边缘和抑制噪声,难以正确识别信号中的噪声然后加以去除。基于小波变换的降噪方法[2-3]对非平稳信号降噪有一定的优势,但小波基和阈值的选择以及小波分解的层数,均会大大影响降噪的效果。
近年来,时频峰值滤波算法TFPF在地震探测、信号处理等领域得到了广泛的应用[4-5]。TFPF算法是一种基于瞬时频率估计的信号增强方法来消除随机噪声。但是TFPF算法中,信号保真和噪声压制会因为窗长的选择而引发矛盾:长窗长可以有效的去除噪声,但同时会造成有效信号的幅值损失;短窗长在压制噪声方面的力度不够但却能很好地保护有效信号的幅值。因此,针对TFPF这种情况,我们采用这样一种方式:在信号处理之前先对原始振动信号进行模态分解,得到一系列的本征模态函数IMFs,对不同频段的IMFs采用不同的窗长进行TFPF处理。
经验模态分解EMD是一种根据信号的局部特征时间尺度将复杂的信号分解为多个IMFs的经典的时频分析方法。然而在EMD分解过程中,模式混叠现象经常会发生[6]。这种现象严重妨碍了特征信息的完全提取。因此,集成经验模态分解EEMD方法作为EMD的改进而被提出[7]。该方法通过加入高斯白噪声,并将平均结果作为最终结果实现对信号进行分解。虽然高斯白噪声的加入在一定程度上解决了模式混合问题,但EEMD产生的IMF往往含有残余噪声[8]。
为了克服EEMD的缺点,提出一种完整的自适应噪声集成经验模态分解CEEMDAN方法[9]。该算法在分解的每个阶段都加入了特定的噪声,而不是高斯白噪声。当得到唯一剩余时,真正的IMF被定义为当前剩余数与其局部均值之间的差值。从而缓解了EEMD产生的问题。CEEMDAN方法的迭代次数是EEMD方法的一半,并能准确地实现信号的分解。对信号进行CEEMDAN分解后,得到了一系列的IMFs,然后针对不同的IMFs选择不同的窗长进行处理。这样就可以解决TFPF在窗长选择方面的问题,达到噪声抑制和信号保真的平衡。将含噪信号进行分解,得到频率成分由高到低的不同的IMFs。高频的IMFs主要包含的是噪声信号,选用长窗长去噪,低频成分主要是有效信号,用短窗长保真。需要一个阈值来判断降噪窗长的选择。排列熵PE作为测量时间序列的随机性的参数,其熵值越大,表示时间序列越随机,相反,熵值越小,则说明时间序列越规则[10]。因此,可以使用排列熵检测信号的随机性,通过设置排列熵的阈值来判别模态分量含噪的程度。提出了CEEMDAN-PE-TFPF的降噪方法,首先通过CEEMDAN将各种状态下的振动信号分解,得到一系列的IMFs,然后用PE值作为噪声IMFs和有效IMFs的判断阈值。接着,对分类的IMFs选择合适的窗长进行TFPF降噪处理。最后将降噪后的IMFs与保留的IMFs进行重构,得到最终的降噪结果。
2 基本原理
2.1 CEEMDAN
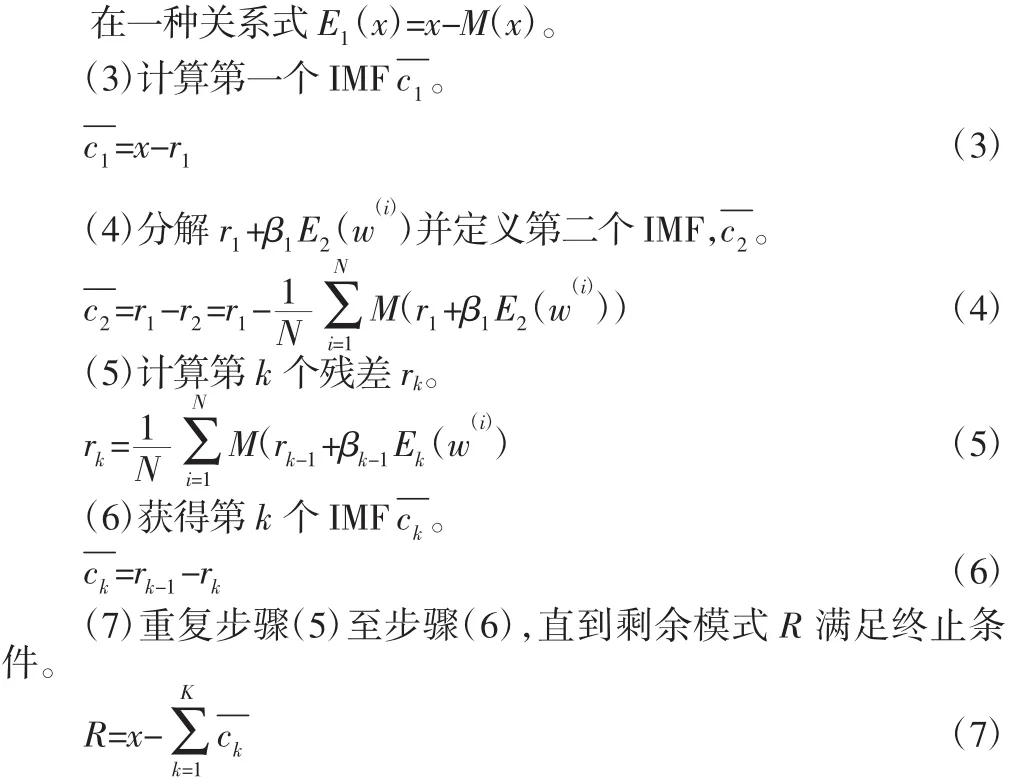
使用CEEMDAN进行分解的原理如下。
(1)在原始信号x中加入由EMD分解的高斯白噪声的第k个 IMF,E1(w(i))。

式中:βk=ε0std(rk)—每个阶段的信噪比。
(2)利用EMD计算x(i)的局部均值,得到第一个残差r1。

式中:N—总集合数;M(·)—产生信号局部均值的运算符,这里存
2.2 TFPF
TFPF算法是一种基于伪Wigner-Ville(PWVD)分布的瞬时频率估计的信号增强方法。利用TFPF可以在不需要假设的情况下,干净的恢复出有效信号。具体步骤为:
(1)利用调频技术将含噪信号y(n)转化为单位幅值解析信号的瞬时频率z(t),其定义如下,式中,ρ表示频率调制指数:

(2)根据瞬时频率的定义,将含噪信号y(n)转换为解析信号zy(n)的瞬时频率。然后,利用伪Wigner-Ville分布(PWVD)的峰值作为解析信号的瞬间频率估计,即作为有效信号x(n)的估计值。

3 CEEMDAN-PE-TFPF降噪法
针对TFPF在窗长选择方面的局限性,给出了一种CEEMDAN-PE-TFPF的降噪方法。提出的方法的完整流程,如图1所示。

图1 故障诊断方法的流程图Fig.1 The Flow Chart of Fault Diagnosis Method
具体步骤如下:(1)利用CEEMDAN方法对含噪信号进行模态分解,得到频率成分由高到低排列的IMFs。但是,每个模态不是纯噪声或是纯有效信号,而是信号成分和噪声成分相互堆叠的模态。因此,需要设定一个阈值判定哪些模态需要滤波处理。(2)计算每一个模态的PE值。通过计算一些具有代表性的信号PE值发现,随机噪声和高斯白噪声的PE值较大,接近1;规律的正弦信号和余弦信号的PE值最低,在0.15左右。单一调幅信号、单一调频信号、调幅调频同时存在的调制信号以及周期性振动冲击信号的波形都较为规则,PE值大概在0.3左右。间歇信号相对于规律的正弦和余弦信号较为随机,其的熵值也大于0.6。经过多次试验可以发现,排列熵可以作为信号随机性的检测,且可以取PE值0.55作为判断信号随机性与否的阈值,选取PE值为0.9作为判断信号选择长窗长降噪和短窗长降噪的阈值。(3)选择长窗长的TFPF对PE值大于0.9的IMFs进行滤波,选择短窗长的TFPF对PE值大于0.55且小于0.9的IMFs进行滤波,其余的IMFs直接保留。(4)将去噪处理后的IMFs和剩余的IMFs重构得到最终的降噪后的信号。
4 仿真分析
设置一个多调制源的仿真信号来验证提出方法的降噪效果,仿真信号的表达式,如式(10)所示。其中,采样频率为12800Hz,调制频率fm1=23Hz,fm2=72Hz;载波频率fc=300Hz;n表示噪声。纯净信号和含噪信号的时域波形对比,如图2所示。


图2 含噪信号和纯净信号的时域波形Fig.2 Time-domain Waveform of Noisy Signal and Pure Signal
首先利用CEEMDAN方法对含噪信号进行模态分解,得到频率由高到低排列的15个IMFs,如图3所示。然后计算每一个IMFs的PE值,并将其列在表1中,并根据PE的值进行分类。从表1中可以看出IMF1的PE值大于0.9,进行长窗长TFPF降噪。而IMF2、IMF3和IMF4的PE值大于0.55且小于0.9,根据前面的介绍,选择短窗长TFPF进行滤波。其余的IMFs则直接保留。前四个IMFs的滤波结果在图4中显示。同样可以得出结论:长窗长TFPF滤波,可以最大限度的消除噪声,但同时信号损失也比较严重,短窗长TFPF保留了最多的有效信号,但降噪能力较弱。最后将前四个降噪后的IMFs,连同剩余的未处理的IMFs一同重构,就得到了降噪后的信号。如图5将重构的降噪信号与原始的纯净信号相比较,可以看出,CEEMDAN-PE-TFPF的降噪方法几乎可以完美的还原原始的纯净信号,没有引起有效信号的大量丢失且没有残留过多的噪声信息。
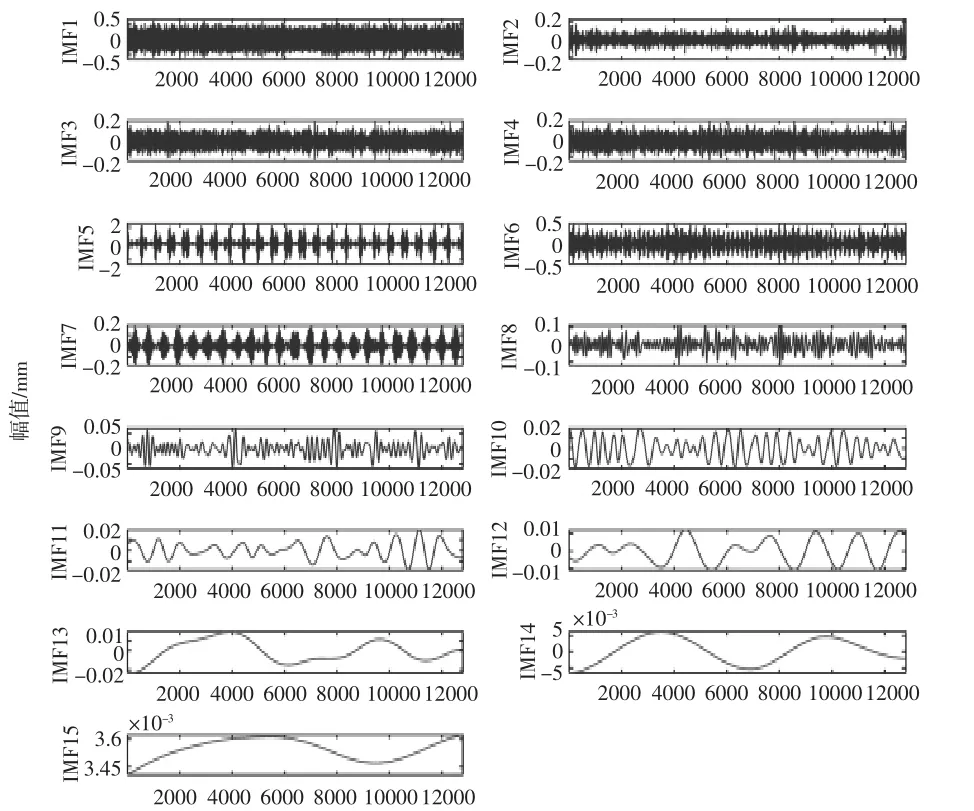
图3 通过CEEMDAN算法获得的IMFsFig.3 The IMFs Obtained Using CEEMDAN Algorithm
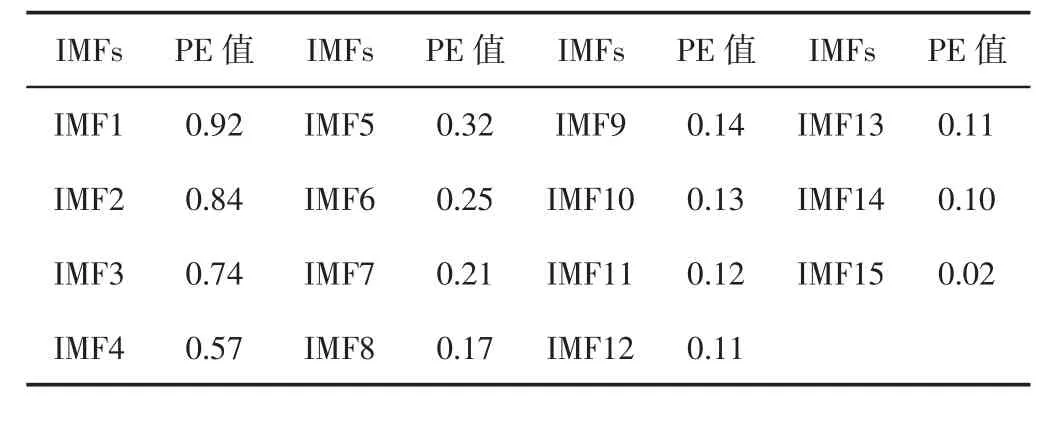
表1 IMFs的PE值Tab.1 The PE Values of the IMFs
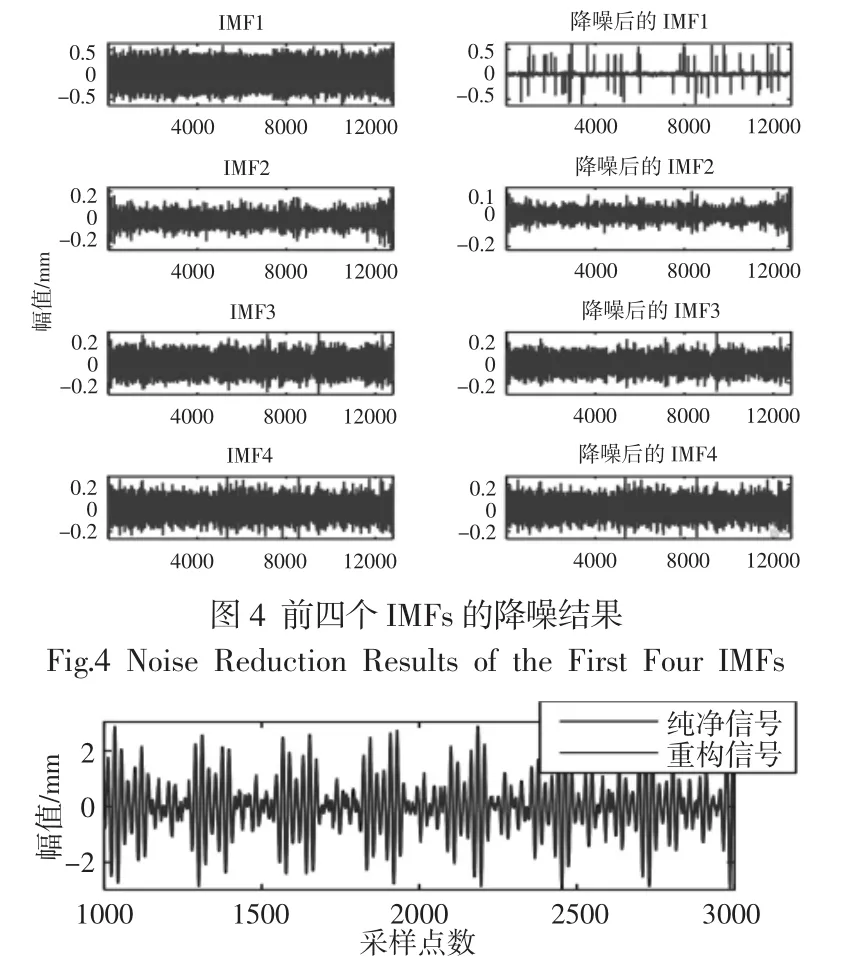
图5 重构信号与纯净信号的时域波形Fig.5 Time-Domain Waveform of Reconstructed Signal and Pure Signal
信噪比(SNR)和均方差(MSE)一般被认为是衡量降噪效果的重要指标,因此通过计算原始含噪信号,EMD-PE-TFPF、TFPF和小波包降噪算法的信噪比和均方差,来进一步对比说明CEEMDANPE-TFPF的有效性和优越性。对比结果,如表2所示。可以得到如下结果:使用CEEMDAN-PE-TFPF方法得到的SNR大于其他方法,且MSE是最小的。同时,通过循环自相关解调谱分析可以看出,降噪后的信号依然可以准确辨识出低频的23Hz和72Hz的调制频率,高频的二倍载波频率(600Hz)及其以调制频率为间隔的边频带,如图6所示。更说明了提出的降噪方法,不仅可以消除多余的噪声,而且可以保留原始信号中的有效成分,提高了信噪比。

表2 不同降噪方法所得到的SNR和MSETab.2 Value of SNR and MSE of Different De-noising Methods

图6 降噪后的信号的循环自相关谱图Fig.6 The Cyclic Autocorrelation Spectral Diagram of the De-Noised Signal
5 实验验证分析
利用实测的单级齿轮传动实验系统中的点蚀数据来进一步验证所提出的CEEMDAN-PE-TFPF降噪方法的有效性。实验装置,如图7所示。齿轮的点蚀情况,如图8所示。其中,齿轮的齿数为18,扭矩为837Nm,转速为1280r/min,采样频率为12800Hz。采用了动态数据采集分析系统采集振动信号。将原始的振动信号通过CEEMDAN分解后得到了从高频到低频排列的15个IMFs。然后根据表3所示的相关PE值将IMFs分为三类。PE值大于0.9的IMFs为第一类,使用长窗长的TFPF滤波;PE值大于0.55且小于0.9的IMFs为第二类,使用短窗长的TFPF滤波;PE值小于0.55的IMFs直接保留。最后,将降噪后的IMFs和直接保留的IMFs重构,就得到了降噪后的信号。为了对比说明提出的降噪方法更加有效,同样利用EMD-PE-TFPF方法、固定窗长的TFPF方法和小波包方法对相同的振动信号进行降噪。对比了各种方法的重构结果,如图9所示。可以看出,提出的方法在保留有效成分与消除无效噪声之间取得了一定的权衡。而EMD-PE-TFPF在噪声消除方法表现不突出;固定窗长的TFPF和小波包降噪在有效信号的保留方面表现差强人意。同时计算每种方法降噪后的SNR和MSE直观对比降噪效果。对比结果可以清楚的发现,所提出的方法降噪后的SNR是最高的,且MSE是最小的,如表4所示。

图7 齿轮传动系统的实验平台Fig.7 The Experimental Setup of the Gear Transmission System

图8 齿轮点蚀Fig.8 Gear Tooth Pitting
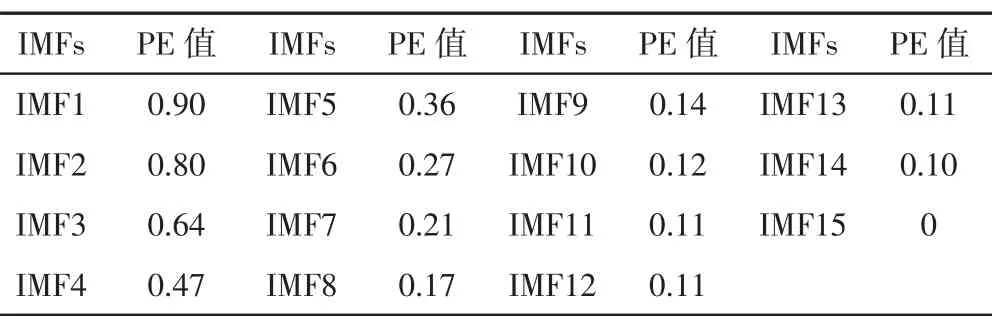
表3 IMFs的PE值Tab.3 The PE Values of the IMFs


图9 多种方法重构的信号的对比时域波形Fig.9 Contrast Time Domain Waveform of Signals Reconstructed by Various Methods

表4 不同降噪方法所得到的SNR和MSETab.4 Value of SNR and MSE of Different De-Noising Methods
为了显示提出的方法在降噪后依旧可以保留振动信号中故障特征,对重构后的信号进行循环自相关解调谱分析。当齿轮系统发生点蚀故障时,齿轮每转到接触点蚀部分时,由于摩擦力的突然增大,频谱图中会产生冲击现象,啮合频率受到调制,则会出现一系列等间隔的频率簇。它们形成了以旋转频率为间隔的边频带,分布在啮合频率的两侧。这里齿轮的转速为1280r/min,因此该齿轮的啮合频率为384Hz,齿轮的转动频率为21.33Hz。载波频率在384Hz时的振幅及其谐波频率较大,如图10所示。此外,存在旋转频率21Hz的一倍频、二倍频等倍频为间隔的一系列边频带集中在啮合频率及其谐波频率的两侧,并且由于调频和调幅的同时存在,信号的边频带不再对称分布。说明了降噪后的信号不仅消除了无用的噪声信号,同时也完整的保留齿轮振动信号中隐藏的故障信息。
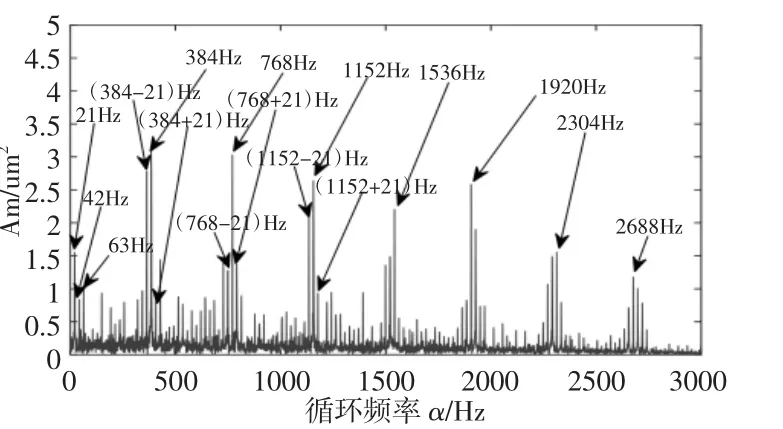
图10 降噪后的信号的循环自相关谱图Fig.10 The Cyclic Autocorrelation Spectral Diagram of the De-Noised Signal
6 结论
提出了一种基于CEEMDAN-PE-TFPF的降噪算法。首先,将振动信号通过CEEMDAN方法自适应地分解为一系列的IMFs,然后计算这些IMFs的PE值,利用PE值作为选择窗长的阈值进行TFPF滤波。并通过与多种方法的对比验证了CEEMDAN-PE-TFPF降噪方法的有效性。该方法利用CEEMDAN降低了振动信号分解过程中模态混叠和虚假模态的影响,同时用PE作为阈值也可以解决TFPF的窗长选择在有效信号保留和噪声信号剔除之间的矛盾,同时利用包络谱的分析说明,降噪后的信号也非常有利于故障特征的提取。提出的降噪方法简单有效,易于实现,在下一步的工作中,CEEMDAN-PE-TFPF算法与人工智能技术相结合为后续的准确的信号处理和故障诊断奠定了基础。