一种拉切式水果采摘器的设计
2020-03-27周潇曾钦严灿
周潇 曾钦 严灿

摘 要:针对传统水果采摘方式劳动强度大、现有采摘器对复杂地形果园的水果采摘不便的问题,设计了一种由拉切装置、收集装置、支撑杆和拉绳装置等组成的拉切式水果采摘器,对该采摘器零件进行加工和装配得到其实物模型,并使用该实物模型进行了水果采摘实验。实验结果表明该采摘器具有携带方便、重量轻、操作灵活,可以在复杂的地形当中使用,且采摘过程对水果有保护作用的特点,且随着采摘时间越长其采摘效率越高,应用前景广泛。
关键词:拉切式;水果采摘器;加工和装配;实物模型
中图分类号:S225.93 文献标识码:A开放科学(资源服务)标识码
doi:10.14031/j.cnki.njwx.2020.01.002Open Science Identity(OSID)
Abstract: According to the problems of high labor intensity of traditional fruit picking methods and inconvenience of existing harvesters for fruit picking in orchards with complex terrain, a kind of pull-cut fruit picker was designed, which was composed of pull-cut device, collection device, support rod and pull rope device. Its parts were processed and assembled to get its physical model, and fruit picking experiment was carried out on the physical model. The experimental results show that the device has the characteristics of easy carrying, light weight, flexible operation, can be used in complex terrain, and has the protective effect on fruit. The longer the harvesting time, the higher the harvesting efficiency, and broad prospect of application.
Keywords: pull-cut; fruit picking device; machining and assembly; practicality model
0 引言
由于我國山地丘陵地区面积广阔且大部分种植果树,仅西部地区果园面积就达286万hm2[1]。近年来,为转移农村劳动力,统筹城乡经济协调发展,大量壮年劳动力外出务工,留在家里的主要是老、弱、病、残、妇女、儿童。而水果采摘期短,劳动强度大,对采摘人员有较高体力要求,这种矛盾更突显了果业采摘难度大的问题[2-3]。在偏远的山区,果园分布比较广泛,果树和果实的分布高低落差大,且一般种植于地形地貌崎岖复杂之地,该类地区果农目前普遍使用的采摘方式为人工使用剪刀采摘,不仅劳动强度大,而且效率低,对于分布在果树中高空的水果采摘费力且不安全,使得该类地区对于中高空水果的采摘率非常低[4-5]。同时,市面上现有的水果采摘机器笨重且造价昂贵,操作复杂,维修成本高,不适合复杂地形的果园使用[6]。基于以上原因,急需设计出一种新的水果采摘装置,使其具备操作方便、价格便宜、能适用复杂地形果园采摘、且对于中高空水果采摘统一适用的特点。
1 总体结构设计
针对传统水果采摘方式劳动强度大、现有采摘器对复杂地形果园的水果采摘不方便等问题,设计了拉切式水果采摘器,其具有结构简单、质量轻、便于携带、操作简单、价格便宜、对于中高空水果采摘同样适用等特点。拉切式水果采摘器主要由拉切装置、收集装置、支撑杆、拉绳装置四大部分组成,具体结构如图1所示。采摘水果时,由拉绳装置驱动拉切装置对水果果柄进行剪切,剪断的水果由收集装置回收到水果储藏装置中。
1.1 拉切装置
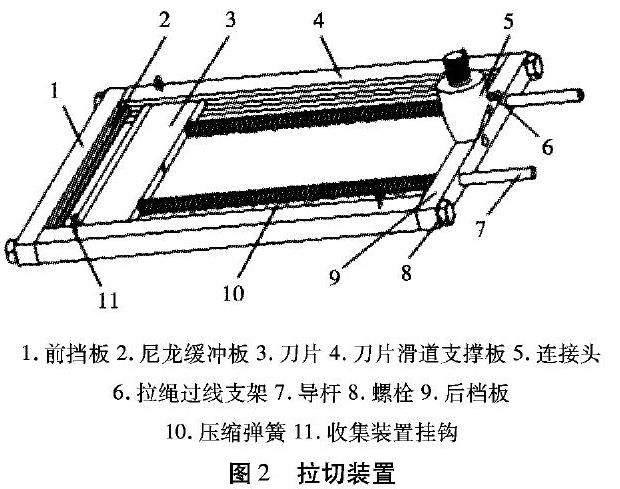
拉切装置主要由前挡板、后挡板、刀片滑道支撑板、导杆、刀片、连接头、压缩弹簧、拉绳过线支架、收集装置挂钩等部件组成,如图2所示。刀片滑道支撑板开有滑槽,刀片置于滑槽内部进行前后移动,前、后挡板与刀片滑道支撑通过螺栓连接构成整体拉切框架,前挡板内部还粘贴有尼龙材料的缓冲板,以保护刀片在剪切过程中不被损坏。刀片后端部通过螺纹连接的方式连接有2根导轨,导轨穿过后挡板的通孔,导轨上安装有压缩弹簧,同时刀片后端部中间的螺纹孔用来连接拉绳,通过控制拉绳便可使刀片在滑道内前后移动进行剪切。拉绳往下拉时弹簧压缩,伸开拉绳依靠弹簧的恢复力推动刀片移动进行剪切。拉切装置的2块刀片滑道支撑板下端面焊接有4个收集装置挂钩,用来安装收集装置,后挡板下部焊接有连接头,连接头外侧焊接有拉绳过线支架,连接头外螺纹用来安装支撑杆。
1.2 收集装置
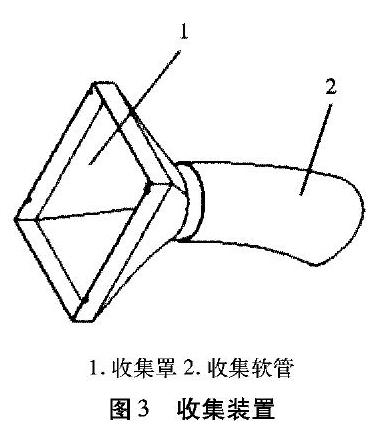
收集装置主要包括收集罩和收集软管2部分,如图3所示。收集罩采用透明的亚克力板材或其他透明塑料材质产品制作,方便水果采摘的时候不遮挡视线。收集装置安装时,依靠收集罩上端两侧开有的4个通孔与拉切装置中的收集装置挂钩连接即可,安装和拆卸方便快捷。收集软管通过卡箍安装在收集罩下端,可以采用塑料、棉、麻等软性材质,其主要是起到水果下落后的缓冲和输送作用。收集软管下端可直接连接水果储藏装置,采摘的水果通过软管直接入筐,节省人工二次装箱和搬运,大大提高采摘效率。
1.3 支撑杆
支撑杆整体采用可伸缩的结构,如图4所示,既方便携带又可以适用不同高度的水果采摘情况。支撑杆上端通过M8的内螺纹孔与拉切装置连接头进行对接,安装和拆卸都非常方便,下端安装有符合人机工程学的把手,整体材质采用轻质杆,使果农在水果采摘过程中不容易产生疲劳,降低了劳动强度。
1.4 拉绳装置
拉绳装置与拉切装置相连,实现对刀片的移动剪切控制,其结构和安装形式如图5所示。拉绳装置主要由螺纹连接头、拉绳、拉环或手柄等部分组成,螺纹连接头连接在拉切装置刀片后端部内螺纹孔中,拉绳安装时穿过拉切装置的拉绳过线支架以防止采摘过程中拉绳与其他部件发生干涉,拉环或手柄与拉绳相连置于最末端,采摘时可通过调节支撑杆的长度来匹配不同长度的拉绳。使用时,向下拉动拉环或手柄,使刀片向拉切装置后部移动,此时弹簧压缩,水果置于拉切装置中后放开拉环或手柄,刀片在弹簧回复力的作用下滑动到拉切装置前端与前挡板上的尼龙缓冲板接触,实现水果果柄的切断。
2 采摘工作原理与实验验证
2.1 工作原理
拉切式水果采摘装置在进行水果采摘前,先将拉切装置中的刀片、压缩弹簧、前挡板、后挡板、刀片滑道支撑板、导杆、拉绳安装固定好,再将支撑杆与拉切装置连接头对接并拧紧。根据需要采摘水果果实的实际高度来调节支撑杆的长度,最后将收集装置固定在拉切装置下端,并选择好水果储藏装置后将收集装置软管与储存装置相连。采摘时,一只手握住支撑杆把手,一只手握住拉环或手柄并向下拉动,使刀片与前挡板之间具有比采摘果实稍大的开口;将开口对准水果,并使得水果进入收集装置中,只留果柄于拉切装置外,然后松开拉绳手柄,刀片在压缩弹簧的回复力作用下将刀片及果柄挤压向尼龙缓冲板上,依靠弹簧弹力所转换成的刀片剪切动能实现对果柄的切断。被切断果柄的水果掉入收集装置的收集罩,并顺着收集软管自由滑落至水果储存装置中,实现水果的采摘和收集。
2.2 实验验证
将拉切式水果采摘器各零部件进行实物模型制作,为了加快模型制作速度和减少实验成本,对收集罩进行简化,将收集软管直接安装在拉切装置上。各零件进行组装后,得到了如图6所示的拉切式水果采摘器实物模型,然后对实物模型进行实地水果采摘实验验证。
实验时以采摘柑橘园内的柑橘为实验对象,如图7所示,并与人工剪刀采摘柑橘进行对比。实验时选择柑橘密度和果树高度相近的区域进行采摘,并设定五组不同采摘时间,统计在限定时间内利用拉切式水果采摘器和人工采摘两种方式采摘水果的数量,实验结果如下表所示。
由表可知,拉切式水果采摘器在相同时间内比人工剪刀采摘的水果更多,且随着采摘时间的增加拉切式水果采摘器采摘的数量与人工剪刀采摘的差距加大。这是因为采用人工剪刀采摘遇到中高空水果的时候一般需要借助桌子、梯子等移动高空平台,每更换一颗果树就需要移动高空平台一次,而果园一般分布在崎岖不平的山区中,所以平台在移动和搭建过程中需要消耗大量的时间和精力,同时采摘完后还需要对水果进行二次分拣和分装,也会消耗一定的时间。
拉切式水果采摘器携带方便、重量轻、操作灵活,可以在复杂的地形当中使用,同时通过调节伸缩杆的长度即可适用不同高度的水果采摘,采摘的同时可将水果直接输送到包装箱、果篮等水果储存容器中,所以采摘时间越长,采摘的优势就越明显,采摘效率就越高。
3 结论
本文针对传统水果采摘方式劳动强度大、现有采摘器对复杂地形果园的水果采摘不便等问题,设计了一种由拉切裝置、收集装置、支撑杆和拉绳装置等部件组成的拉切式水果采摘器。通过对该采摘器各零部件进行设计和制造得到了该采摘器的实物模型,并利用实物模型进行了果园实地采摘实验。实验结果表明该采摘器具有携带方便、重量轻、操作灵活的优点,可以在复杂的地形当中使用,同时通过调节伸缩杆的长度可适用不同高度的水果采摘,且采摘过程对水果有保护作用,随着采摘时间的增加,该采摘器采摘的优势越明显,采摘效率越高,具有很好的应用前景。
参考文献:
[1]张洁,李艳文.果蔬采摘机器人的研究现状、问题及对策[J].机械设计,2010,27(6):1-5.
[2]陈志,黄建明,张祥.一种新型剪切式木本水果采摘器的设计[J].机械工程师,2019(5):54-55+59.
[3]乔宇航,蔡晓君.水果中型采摘器的机械结构设计与分析[J].中国农业科技导报,2018,20(10):66-72.
[4]赵德修.一种简易水果辅助采摘机设计[J].中国农机化学报,2018,39(6):28-31+43.
[5]秦涛,李江江,石刘洋.一种旋转切割式水果采摘器设计[J].林业机械与木工设备,2019,47(3):37-40.
[6]周亚男,邱海飞,赵晓敏,等.新型高枝水果采摘器[J].机械传动,2019,43(6):139-143.
