基于LabVIEW和模糊控制的大棚气体施肥控制系统的仿真研究
2020-03-27张泉梁忠伟刘晓初金杰
张泉 梁忠伟 刘晓初 金杰

摘要:CO2是农作物进行光合作用的重要因素之一,直接影响农作物的生长。因此,科学合理的增施措施势在必行。本文针对蔬菜温室大棚内CO2气肥增施量受多因子影响难以建立精准控制模型的特点,以种植西红柿为例,提出了一种充分利用农作物不同环境下的大棚气体施肥模糊控制系统。以温度和光照强度为2大主要影响因子,利用LabVIEW中的模糊系统设计器建立模糊控制系统,并对该系统进行仿真研究。结果表明,系统运行稳定可靠,操作簡单方便,精准地实现了对大棚内西红柿生长的CO2气肥增施控制。
关键词:CO2气肥;温度;光照强度;模糊控制
近年来,随着我国设施蔬菜迅速发展,CO2气肥增施技术也不断得到推广和应用,取得了显著的经济效益。CO2是农作物进行光合作用的主要因素之一,在适宜的温度和光照强度等外界环境下,将CO2和水转化成有机物,并释放出O2。但大气中CO2的浓度普遍低于植物生长所需的CO2浓度,而且温室大棚种植,由于密闭环境和种植密度等原因,极易产生CO2不足[1] 。据测定,植物正常生长的CO2浓度为1130~2820mg/dm3,而密闭温室大棚内CO2浓度最低时不足380mg/dm3,较低的CO2浓度将严重地影响植物光合作用的进行。
现代温室大棚内增施CO2气肥普遍采用通风换气发、有机肥发酵法、固体CO2气肥施放法或者化学反应法等。阜蒙县农发局蔬菜服务总站提出吊带式CO2气肥大棚施肥使用技术。使用时用容器或塑料袋盛放,吊挂在植株上部,下午或傍晚取下,倒在棚内适当地点并及时与土壤拌和[2]。与传统技术相比,虽然简单易用,但需要有丰富的种植经验的工作人员判断使用量、使用时间和使用时期、不宜大范围推广使用。天津农学院单慧勇副教授设计的温室CO2气肥补施控制系统采用 Arduino Mega2560 作为系统主控制器,通过采集温室内CO2浓度、光强温度等环境参数,结合设定的CO2目标浓度自动控制气肥发生器的工作状态[3]。此方法虽能增加温室大棚内CO2浓度,但未考虑到植物在不同生长时期,不同生长环境下农作物对CO2浓度的不同需求,不能做到智能调控。
本系统采用CO2发生器钢瓶,利用柠檬酸与碳酸氢钠在常温下反应生成CO2(3NaHCO3+C6H8O7=C6H5O7Na3+3H2O+3CO2↑)经恒压减压后输送到大棚内,原料价格低廉,容易获得,反应迅速,无需加热、提纯、过滤,无有害气体产生,使用安全方便。为了进一步实现大棚内气体的智能控制,开发了基于LabVIEW和模糊控制的大棚气体施肥控制系统,利用LabVIEW中的模糊系统设计器,以温度和光照强度为两大主要影响因子作为输入,采用重心法,输出当前环境下适宜的CO2浓度,具有测量显示环境参数和连接到执行设备实行自动控制的功能,既可以单独用作大棚环境检测控制, 也可以作为智能化大棚控制系统的一部分。常见蔬菜适宜的CO2施肥浓度(见表1[4])。
1系统的设计原理和方法
1.1设计原理
大棚气体施肥控制系统首先经人工手动选择农作物的品种及生长时期,通过温度和光照强度传感器检测温室大棚内的环境因素,由模糊决策决定气肥增施与否及施加量,从而达到精准调节大棚内CO2浓度的目的。模糊控制的原理框图如图1所示。
1.2系统开发的软件环境
LabVIEW是实验室虚拟仪器集成环境(Laboratory Virtual Instrument Engineering Workbench)的简称。虚拟仪器是在以通用计算机为核心的硬件平台上,由用户设计定义,具有虚拟面板,测试功能由测试软件实现的一种计算机仪器系统[5]。 其将传统的仪器仪表技术与现代计算机技术相结合,基础仍是计算机系统,核心是软件技术。其主要功能是通过软件实现的。本文使用LabVIEW2015模糊逻辑控制工具包,不仅可以直接在图形化界面下设计模糊控制器,还可利用各种函数库,与传感器等数据采集设备相连接,构建所需的大棚气肥控制系统,并进行模糊控制器的仿真。
2模糊控制系统设计
2.1定义输入输出变量论域及隶属函数
本大棚气体施肥控制系统CO2增施量决定于传感器采集的温室大棚内温度和光照强度,因此模糊控制系统是以温度和光照强度作为输入,当前环境下适宜农作物生长的CO2浓度作为输出的双输入、单输出系统。
本系统以西红柿种植为例,西红柿在不同生长时期对温度也有着比较严格的要求,初期开展秧苗栽培过程中需要降低温度,出土前期5~6d,夜间温度控制在11℃左右,白天温度控制在23℃左右,以此来促进秧苗的正常生长[6]。在正常条件下,同化作用最适温度为20~25℃,根系生长最适土温为20~22℃。提高土温不仅能促进根系发育,同时土壤中硝态氮含量显著增加,生长发育加速,产量增高。选用的无线温度传感器测定范围是-40~75℃,为与实际大棚内的温度相匹配,温度区间选定为0~40℃,将之划分为7级(见表2)。
西红柿在不同生长期对光照的要求不同,发芽期不需要光照,幼苗期要求光照充足幼苗才能发育良好,光照不足会影响花芽分化,影响花授粉。结果期光照充足坐果多,膨果快,光照不足坐果少影响产量,光照太强持久则会对果实造成日灼病[7]。西红柿是喜光作物,光饱和点为70klux,适宜光照强度为30~50klux。西红柿是短日照植物,在由营养生长转向生殖生长过程中基本要求短日照,但要求并不严格,有些品种在短日照下可提前现蕾开花,多数品种则在11~13h的日照下开花较早,植株生长健壮同样考虑实际因素,选用光照强度传感器的测定范围是0~100klux,划分为7级(见表3)。
模糊控制系统的输出是CO2浓度值。物理论域U为[0,1000],模糊论域N为[0,10],比例因子:
ku=u/n=100(1)
输出的模糊论域乘以比例因子ku即为实际的输出量(当前环境下适宜农作物生长的CO2浓度值),划分为7级(见表4)。本系统的输入、输出变量均采用三角形隶属函数,由3个参数a,b,c确定三角形曲线的形状,即:
f(x,a,b,c)=0x≤a
x-ab-aa≤x≤b
c-xc-bb≤x≤c
0x≥c(2)
式中,参数a和c确定三角形的“脚”,参数b确定三角形的“峰”。
2.2模糊规则控制和模糊控制表的建立
本文所设计的大棚农作物生长所需CO2浓度模糊推理系统是双输入、单输出系统。为了保证推理可靠准确,把温度划分为7个语言变量,光照强度划分为7个语言变量,输出变量划分为7个语言变量。因此该模糊推理系统共有49条。大棚气体施肥控制系统仿真开始前,作如下定义:用tem代表大棚内的温度,用int代表光照强度,用con代表适宜CO2浓度。模糊规则的制定应在农业专家或有丰富的蔬菜大棚种植经验的农民指导下进行,从而保证规则的科学合理性。该系统的模糊规则制定如下:
Rule 1:IF tem is VL and int is VD THENcon is VS
Rule 2:IF tem is VL and int is LD THENcon is VS
Rule 3:IF tem is VL and int is RD THENcon is LS
……
Rule 48:IF tem is VH and int is LB THENcon is LS
Rule 49:IF tem is VH and int is VB THENcon is VS(见表5)。
2.3反模糊化
经过模糊推理后,输出的结果是一个模糊集合,需通过反模糊化将模糊推理结果转化为精确值。常用的反模糊化方法有3种,包括最大隶属度法,加权平均法,重心法。
2.3.1最大隶属度法
简单取所有规则推理结果模糊集合中隶属度最大的元素作为输出。
v0=maxμv(v)v∈V(3)
2.3.2加权平均法
v0=∑mi=1vi·ki∑mi=1ki(4)
2.3.3重心法
取模糊论域隶属度函数与横坐标围成面积的中心为模糊推理的输出值。
v0=∫vvμv(v)dv∫vμv(v)dv(5)
式中,v0为输出结果;V为输出论域;v为输出变量; μv(v)為隶属度函数;ki为各条模糊规则输出的结果在总输出中所占比重。
2.4模糊系统输出
为了得到准确的控制量,使模糊方法能够完善平滑地表达输出隶属度函数的计算结果。本系统采用重心法输出CO2浓度模糊论域的一个值。
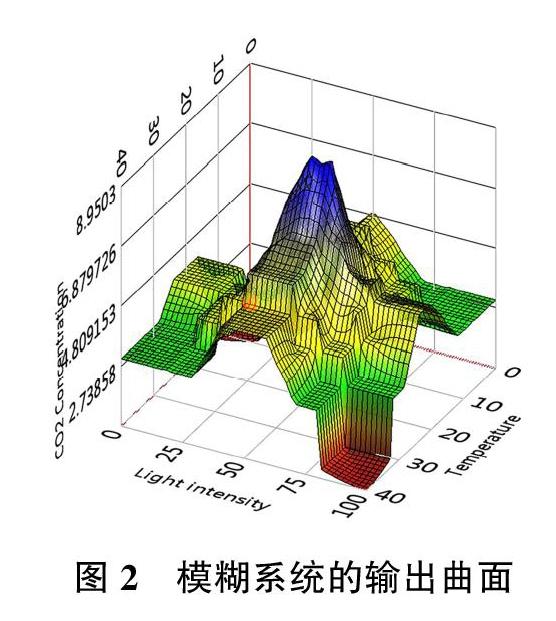
经模糊推理,本系统的输出曲面如图2所示。从图2可以看出西红柿生长过程中所需的CO2浓度与光照强度及温度具有相关关系:在光照强度不变的情况下,西红柿生长所需的CO2浓度随着温度的升高先增大后减小,反之亦然;随着光照强度的增加及温度的上升,植物的光合作用不断加强,西红柿苗生长所需的CO2浓度也在增加;不过当CO2的浓度达到一定值的时候,植光合作用效率达到饱和,不再随CO2浓度的增加而增加,若继续增加CO2的浓度,反而会抑制植物的呼吸作用,使农作物“窒息”而停止光合作用,造成作物减产,果实品质降低,病虫害增加等不良后果。可见,不同的农作物不同的生长时期,不同的生长环境下都有一个适宜的CO2浓度范围。
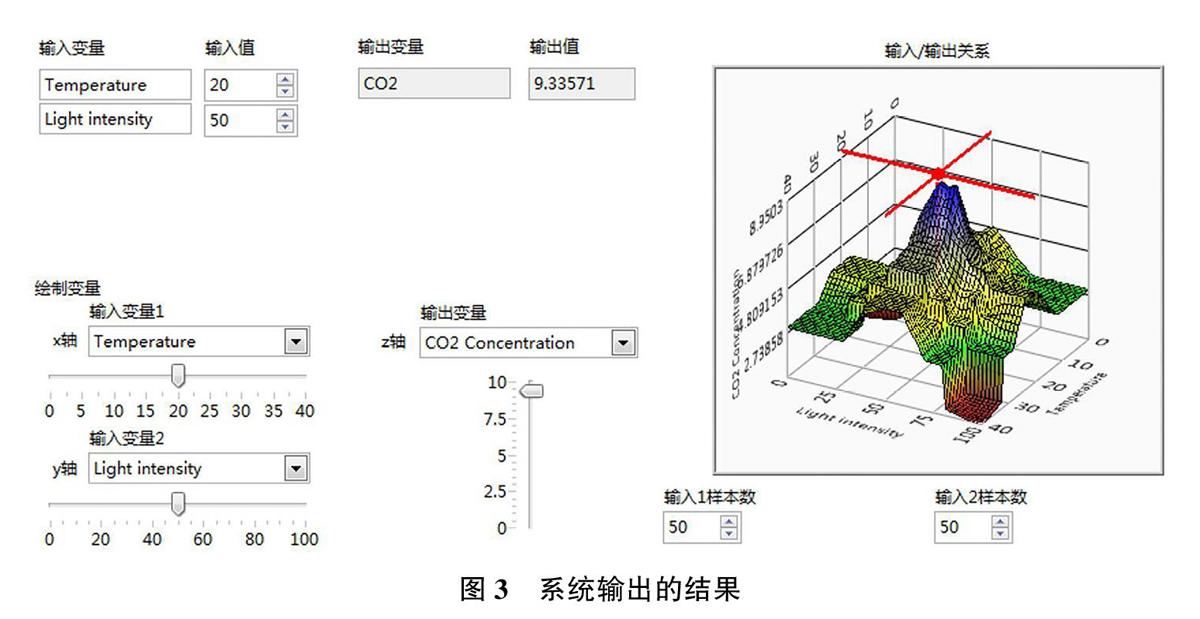
本文设计的大棚气体施肥控制系统能根据传感器测得的温度及光照强度快速得到西红柿生长所需的CO2浓度。例如:当Tem=20℃,Int=50klux,推理得con=9.3357,乘以比例因子ku,即为当前环境下西红柿生长所需的适宜CO2浓度933.57mg/dm3。推理结果如图3。
3结语
本文采用LabVIEW的软件工具包模糊控制器(Fuzzy Controller)设计了作物在不同生长时期的大棚气体施肥模糊控制系统,同时也考虑了温度和光照强度2大影响农作物光合作用的主要因子,克服了单因子决策误差大的不足。
农作物气肥增施受作物品种、气候和土壤等多种因素的影响,本系统基于温度和光照强度构建农作物气肥增施模型,先由传感器检测大棚内的环境信息经数模转换传到PLC,然后根据所建立的模糊规则推出作物此时所需的CO2浓度,进而对CO2气罐电磁阀执行有效的控制。大棚气体施肥模糊控制系统对解决当前农业应用方面CO2过度排放等环境问题具有重大的现实意义。
参考文献
[1] 单慧勇,林宇浩,于镓等. 温室二氧化碳气肥环境调控系统设计[J]. 江苏农业科学, 2019,47(4):204-208.
[2]胡丽娜.吊袋式二氧化碳气肥大棚施肥使用技术[J].现代农业,2017(10):43.
[3]赵鹏,单慧勇,戚自雄,杨延荣,崔靖林.温室二氧化碳气肥补施控制系统设计[J].农业装备与车辆程,2014,52(10):7-9.
[4]牛淑芳. CO2气肥技术在设施蔬菜上的应用[J].中国果菜,2019,39(1):57-59.
[5]龙华伟,伍俊,顾永刚,冯涛. LabVIEW数据采集与仪器控制[M].北京:清华大学出版社,2013:9.
[6]赵晓霞.西红柿大棚栽培技术[J].农业开发与装备,2019(6):196.
[7]宋巍.西红柿生长特性及种植管理技术[J].吉林蔬菜,2017(Z2):20-21.
