无卫导条件下多舰船联合导航方法研究*
2020-03-27韩云东李天伟
韩云东,李 伟,黄 谦,李天伟,王 苏
(海军大连舰艇学院航海系,辽宁 大连 116018)
0 引言
随着导航装备的发展,舰船导航已经由传统导航发展为多系统组合导航,其中卫星导航分别和惯性导航系统(以下简称惯导)或者平台罗经的组合成为许多大型舰船的主要导航方式,然而在复杂电磁环境下,卫星导航可能受到严重干扰,甚至无法正常使用,如何保障舰船编队在无卫星导航条件下仍能得到相对准确的导航信息成为研究的重点。
1 联合导航的背景
随着技术的发展,组合导航成为绝大多数水面舰船主要依靠的导航方式[1]。其中卫星导航虽然能够为用户提供全天候、不间断、高精度、实时的三维位置,但由于其脆弱的抗干扰性使其极易受到电磁干扰而无法正常工作,这就可能导致在复杂电磁环境下舰船执行特殊任务时,由于卫星导航无法工作而使组合导航变成惯导或者平台罗经独自工作的模式中[2-4]。惯导和平台罗经都是自主性导航系统,不同的是平台罗经只具备短时的惯导作用,超过一段时间后必须进行重调校准,由于卫星导航在特定条件下受到干扰或限制而无法使用,平台罗经的位置、航速、航向、姿态等导航信息会随着时间的累计增大,最终导致因误差过大而无法使用。相比于平台罗经,惯导的误差随着时间逐渐增大的幅度会小很多[5-8]。
在多艘舰船以编队的形式执行任务时且卫星导航系统无法使用条件下,只能使用惯导或平台罗经来为本舰提供必需的导航信息。由于并不是所用的舰船都装备有惯导,经过一段时间后,仅装备平台罗经的舰船会由于平台罗经定位误差的增大而丧失导航信息的保障能力,这就直接影响武器系统的使用,进而大幅降低舰船的作战能力[9-10]。为解决该问题,通过采用编队联合导航的方法,在舰船编队构建一个联合导航体系,实现部分导航信息实时共享,保障编队中每艘舰船的平台罗经都能提供较为可靠、有效的导航信息[11-12]。
1.1 联合导航的概念
随着战争样式日趋多样化,对导航系统的考验也日趋严峻,而联合导航就是保障编队中各舰船间导航信息的实时性和相对准确性,提高编队导航系统的可靠性[13-15],为此提出舰船编队联合导航的思想,其概念如下所述。
联合导航:在舰船以编队形式执行任务时,以导航装备性能好、精度高的舰船作为相对参考系的原点建立一个相对坐标系,并将此舰船作为编队母舰,设在此坐标系中母舰的误差可测,母舰通过一定的观测手段确定其余子舰与其相对的方位、位置和航速信息,然后通过一系列的运算得到子舰的相对导航信息,并通过现有手段将这些信息提供给子舰,同时对子舰上误差较大的导航装备进行重调校准,使子舰上的导航信息精度满足需求。
1.2 联合导航的意义
联合导航的意义在于解决以下两个问题:
1)当舰船上的卫星导航系统受到严重干扰或毁坏而导致无法信任和使用时,舰船上安装的组合导航系统就变成惯导或平台罗经单独工作,但是平台罗经在经过一段时间后就很难达到保障武器系统正常工作的指标,甚至很难保障舰船的安全航行。
2)当编队中某一艘舰船遭到严重破坏而导致其缺失必要的导航信息时,舰船的航行安全将无法得到保障,需要导航信息的武备系统也难以有效工作,舰船战斗力将会受到严重制约。
针对以上两种情况,舰船编队联合导航刚好可以解决上述问题。通过建立一个编队联合导航体系,将编队中的每艘舰船均看作是体系中的一部分。在这个编队联合导航体系中,选择其中精度高同时能够提供完整的导航信息的舰船作为编队的母舰,使编队中的所有舰船以母舰为中心建立编队坐标系,母舰通过观测子舰的相对导航信息,并计算得到子舰的导航信息,再通过数据链发送给子舰。由于母舰的导航信息精度比子舰的精度高很多,这样经过测算所得的信息就会更加可靠、准确,能够明显提高子舰导航信息的保障精度,可以为舰船全天候、全时间段执行任务提供不间断的导航信息,进而提高编队中各舰船执行任务的能力,最终提升编队整体作战效能。
2 多舰联合导航数学模型的建立
在舰船编队联合导航体系建立的研究过程中,以一艘装备惯导的舰船和一艘装备了平台罗经的舰船组成一个水面舰船编队为例[16],如图1 所示。

图1 舰船编队联合导航坐标系
假定海况良好,坐标系中A、B 分别作为编队中两艘舰船的起始点,其中A 舰装备惯导,为母舰,B舰仅装备平台罗经,为子舰。坐标轴中取正东和正北分别为横轴和纵轴的正向,在测量过程中设母舰和子舰都以固定的航速和航向行进。起始时,A 舰的航向为α,航速为,B 舰相对A 舰的方位角为β,A舰通过舰载导航雷达观测B 舰的距离为L1,雷达自身的观测误差为ΔL。设A 的位置信息为PA(X1,Y1),则有:

其中,Dφ为纬差、Dep 为东西距、D 为经差,φm为平均纬度,当纬差不大时,用平均纬度代替中分纬度,0≤α≤2π,0≤β≤±π,经过换算得到PB(PBX,PBY)。由于导航雷达的工作性质,设其经过时间T 母舰到达位置D,第2 次扫描到子舰B 时位于位置C,导航雷达的扫描距离为L2,母舰A 与子舰B 的方位角为θ,通过式(1)~式(6)可得母舰到达D 点及子舰到达C 点的位置:

另外,子舰自身的导航装备提供自己的瞬时航向和姿态信息不受无卫星条件的影响,可正常使用。通过归零重调后的子舰具有较高精度的位置信息和航速、航向、姿态等信息,可以有效满足其他武备系统的调用需求。
3 实例分析
某型驱逐舰和某型护卫舰组成舰船编队执行任务,舰船编队成单纵队行进,起点为(30°00'.0N,125°00'.0E)。设编队航向180°,编队先从锚泊状态匀加速一段时间然后以10 m/s 的速度航行,航行时间为8 h,如图2 所示。

图2 编队行进示意图
假设在该舰船编队航行过程中,卫星系统处于被干扰而无法工作的状态,以编队中装备惯导的舰船作为编队母舰,装备了平台罗经的舰船作为编队的子舰,其中A 为母舰的初始位置,B 为子舰的初始位置,经过8 h 后母舰和子舰分别到达了C、D 两个指定位置。由于在整个仿真的过程中唯一不确定的量分别为雷达的观测距离L 及其测量误差ΔL,而这两个变量可由导航雷达设备和其使用手册确定。通过导航雷达观测子舰与母舰的距离分别为L1、L2。由式(1)~式(6)得子舰在B、D 两点的位置坐标如下:
计算可得8 h 后母舰在C 点时的位置如图3 所示。

图3 编队母舰位置图
母舰和子舰的位置可以通过计算得到,在出发前和到达指定位置之后,通过雷达观测可得经过母舰观测后子舰在C、D 两点的粗略位置信息,由于编队始终保持固定的航速稳定行进,所以母舰的航速可直接提供给子舰,将母舰所得的位置和航速信息通过数据链提供给子舰,并与子舰平台罗经测得位置和航速信息进行对比。通过仿真分别得到母舰惯性导航系统和子舰平台罗经定位误差在8 h 内的变化情况,如图4 和图5 所示。仿真图中横轴以小时(h)为单位,纵轴以米(m)为单位。
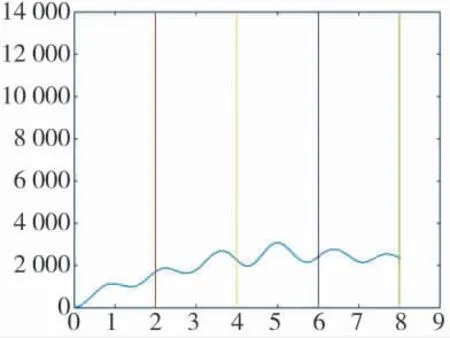
图4 惯导定位误差变化情况

图5 平台罗经定位误差变化情况
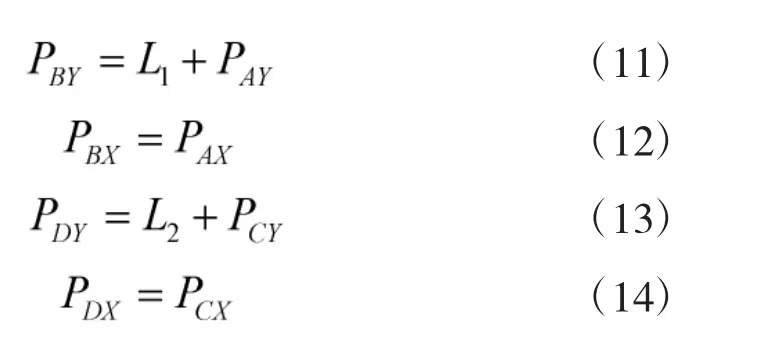
由于位置信息上只有纬度的变化,经度的变化忽略,所以两个图中的曲线分别表示这8 h 内母舰惯性导航系统和子舰平台罗经纬度定位误差的变化情况,4 条竖线分别为时间2 h、4 h、6 h、8 h 4 个时间段,用于进行分段对比。从图4 可以看出,惯导系统的位置信息定位误差随时间缓慢增大,在8 h的时候达到2 000 m 左右;而图5 所显示的平台罗经定位误差随着时间迅速增大,在8 h 的时候达到了12 000 m 左右,远大于惯导系统。
通过分析对比图4 和图5 的曲线变化趋势,可以得出:由于平台罗经定位误差随时间增加迅速,2 h后达到2 750 m,已经无法满足需要,而惯导定位误差则增加缓慢,8 h 内均能提供较为可靠的定位精度,因此,可以通过联合导航的方式,利用母舰惯导系统为子舰的平台罗经提供重调校正基准。根据上述分析,按照每2 h 母舰对子舰的位置信息进行重调校正,只改变子舰平台罗经的纬度定位信息的误差而其余信息不变,子舰保持着原状态继续航行,得到仿真图如图6 所示。

图6 校正后的信息对比图
图6 中的长曲线表征独立工作的平台罗经在8 h 内纬度定位误差的变化情况,3 条短曲线则能够看出平台罗经分别以惯性导航系统在2 h、4 h、6 h的数据作为的起点,每隔2 h 对平台罗经进行一次归零重调,而平台罗经的其余参数保持不变,连续工作后所得的曲线。通过对比短曲线和长曲线可知,经过归零重调后的子舰平台罗经定位精度比其独立工作的平台罗经定位精度有着明显的提升,且随时间的积累精度提升得越明显。独立工作的平台罗经在4 h、6 h、8 h 后的纬度定位误差分别为6 850、9 770 和12 460,而经过归零重调后的平台罗经定位误差分别为3 920、4 470 和4 625,通过对比可以发现,定位误差明显降低。通过实例仿真表明,在无卫星的条件下,通过建立舰船编队联合导航体系能够明显提高子舰导航信息的定位精度,且随时间的积累其提升效果更加明显。
4 结论
在舰船编队联合执行任务日益频繁的今天,联合导航可以有效提高编队中低导航配置舰船在无卫星条件下的导航信息精度,进而提升编队整体的导航保障能力,不仅可提高舰船编队的安全性和可靠性,更能有效提高舰船编队的整体作战效能。本文只是初步提出了联合导航的概念,并对多舰联合导航体系构建进行了简单的实例分析,在联合导航能够进行实际应用之前还将存在很多问题,需要进一步研究和探索。
