串联式混合动力拖拉机分动箱的设计与试验
2020-03-25周润东鲁植雄邓晓亭侯辛奋
周润东,鲁植雄*,邓晓亭,侯辛奋
串联式混合动力拖拉机分动箱的设计与试验
周润东1,鲁植雄1*,邓晓亭1,侯辛奋2
(1.南京农业大学工学院,江苏 南京 210031;2.上汽大通汽车有限公司,上海 200438)
设计的串联式混合动力分动箱由输入轴、中间轴、输出轴以及轴上齿轮和一对滑移齿轮组成。为减小分动箱体积,同时满足配套旋耕机较大耕深需求,在满足结构、强度、刚度等约束条件下,以分动箱总中心距和齿轮总体积最小为目标函数,建立了分动箱参数优化的数学模型。采用基于改进粒子群算法(PSO)的参数优化策略,优化结果表明,与基本粒子群算法相比,改进后的粒子群算法在收敛速度和收敛精度方面均有明显提高,改进后的齿轮总体积减小了2.9%,优化精度提高了1.5%。分动箱运动学仿真及试验结果表明,优化后的分动箱动力输出轴(PTO)动力性能符合要求,能够满足配套旋耕机的工作要求。
混合动力拖拉机;分动箱体积;数学模型;改进粒子群算法;动力性能

有关传统拖拉机的分动箱研究,张淑霞等[1]对东方红–C1304型拖拉机分动箱的结构进行了分析;FRANTZ等[2]、ROEBER[3]建立了分动箱转矩测量与采集系统,分析了分动箱的换档、燃油经济性等。王小冰[4]、侯辛奋[5]对混合动力拖拉机分动箱进行了相关的理论分析,设计了相关分动箱的参数,同时对串联式混合动力拖拉机分动箱的性能进行了建模仿真与可靠性分析。为减小串联式混合动力拖拉机分动箱体积,同时满足与混合动力拖拉机配套旋耕机的不同转速以及较大耕深的需求,笔者在分析串联式混合动力拖拉机分动箱工作原理的基础上,设计了一种后置、独立式分动箱,采用一种新的自适应动态改变惯性权重的粒子群算法(PSO)策略优化分动箱参数[6]:将整个迭代周期分为前期(I)、中期(II)、后期(III)3个子周期,在每个子周期里,惯性权重在合适的区间范围内波动,以提高粒子群算法的收敛速度。以分动箱所有齿轮的体积最小和分动箱总中心距最小为优化目标,确定相关约束条件,采用改进PSO算法对分动箱的结构参数进行了优化设计;同时利用运动学仿真软件对分动箱进行动力学仿真分析,结果表明分动箱高、低档转速均能满足设计要求,并搭建分动箱试验台架,验证了分动箱的旋耕作业性能也能满足相关要求。
1 串联式混合动力拖拉机分动箱的结构与工作原理
串联式混合动力拖拉机分动箱的主要结构如图1所示。轴1为分动箱的输入轴,一端与发动机的输出端相连,另一端与发电机的输入端相连;1为轴1上齿轮,轴2为中间轴,2、3、5为中间轴齿轮,其中1与2啮合,3、5为滑移齿轮;轴3为动力输出轴,发动机的动力传递到中间轴,当滑移齿轮3、5与轴3上齿轮4啮合时,轴3处于高档标准转速,当与轴3上齿轮6啮合时,轴3处于低档标准转速;当滑移齿轮3、5与轴3上齿轮4、6都不啮合时,轴3没有转速输出。参照文献[7],分动箱后置安装在发动机后,发动机输出的动力经过分动箱分为两部分,一部分传输至发电机端发电,另一部分通过齿轮变速机构将动力传递到动力输出轴(PTO)端[8]。
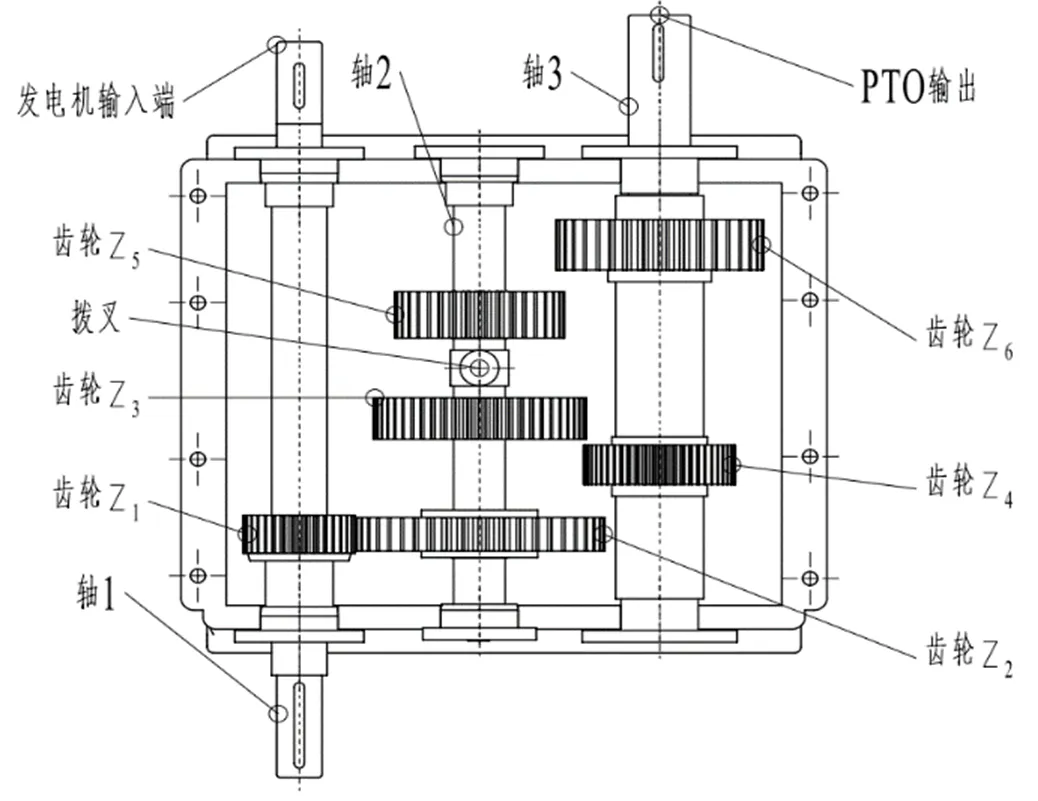
图1 串联式分动箱的结构
2 分动箱的设计
2.1 分动箱设计的相关参数
1) 与分动箱配套使用的发动机参数。发动机通过分动箱将能量传递给发电机与PTO输出,始终与发电机同步转动。由于交流电的频率固定为50 Hz,因而选用额定转速为1 500 r/min的柴油机。
发动机的额定功率为:P=max(P1, P2)。式中:P1, P2分别为发动机带动发电机发电的功率和柴油机提供给PTO功率。
与发动机配套使用的发电机功率为30 kW,效率不低于0.9,计算得P=33.3 kW,因而确定发动机额定功率为36 kW。
2) 轴径参数。轴的材料选用42CrMo,依照文献[9],轴径为d。

式中:[τ]为轴的许用扭转切应力,42CrMo的取值范围是35~55 MPa为轴传递的功率(kW);为轴的转速(r/mim)。
计算可得,轴的最小直径分别为1=35 mm,2=40 mm,3=48 mm。
2.2 确定设计变量
发动机通过输出轴将动力传递至分动箱,依据文献[10–11],当发动机的转速达到标定转速的80%~90%时,PTO的低档转速不能低于540 r/min,高档转速不能低于1 000 r/min。
设第一级减速比为12,齿轮齿数分别为1和2;第二级减速比分别为34和56,齿轮齿数分别为3、4和5、6,计算可得动力分配装置高、低档传动比分别为1.35、2.5。
确定影响齿轮设计的主要因素为设计变量,即齿轮模数,齿轮1、2、3的齿数1、3、5,第一级减速比12,齿宽系数。变量表达式为:
=[1,2,3,4,5,6]=[,1,3,5,12,]T(1)
2.3 建立目标函数
以分动箱所有齿轮的体积最小和分动箱总中心距最小为优化目标,齿轮总体积的目标函数为1(),齿轮箱总中心距的目标函数为2()。


式中:d为齿轮的节圆直径,d=mz,=1,2,3,4, 5,6;b为齿宽,b=mz,b= b–1–5,=1,2,3,4,5,6。
所以,总的目标函数为()。

其中1和2为加权因子,其大小反映1()和2()的重要程度。
2.4 确定约束条件
1) 模数m的限值。依据文献[12],由分动箱的强度及结构设计确定齿轮模数为1~3,即
1,3,5()= –(1,3,5–1)≤0,2,4,6()=1,3,5–3≤0。
2) 齿数1,3,5的限制。一般用途的齿轮,标准压力角为20°,为避免根切,在此压力角下标准直齿轮的小齿轮齿数应≥17,因而有7,8,9()= –(1,3,5–17)≤0。
3) 第一级减速比12限制。10()= –(12–1.35)<0,11()=12–2.5<0。
4) 齿宽系数φ的限制。依据文献[9],齿宽系数φ规定值为0.2、0.25、0.3、0.4、0.5、0.6、0.8、1.0、1.2。有12()=–(φ–0.3)≤0,13()=φ–0.6≤0。
5) 总中心距设计。分动箱在设计的串联式混合动力拖拉机中位置安装在发动机和发电机之间,为了避免PTO与发电机干涉,要求输入轴1与输出轴3的距离,即分动箱总中心距大于选用的发电机的宽度270 mm,即14()= –(–270)≤0。
6) 齿轮与轴不干涉。轴1、2、3的轴径分别为1、2、3,因而有齿轮2与轴3不干涉,齿轮3与轴1不干涉,齿轮5与轴1不干涉。同时,齿轮副34与56的中心距应相同,即34=56,则有:
7) 齿轮副齿面接触疲劳强度约束。齿轮副12、34、56的接触疲劳强度约束:
19,20,21()= σ12,34,56–[σ]≤0,[σ]为齿轮的接触疲劳强度极限。
8) 齿轮齿根弯曲强度约束。齿轮1、2、3、4、5、6齿根弯曲强度约束:
22,23,…,27()= σ1,2,…,7–[σ]≤0,[σ]为弯曲疲劳强度极限。
2.5 建立数学模型
分析可知,串联式混合动力拖拉机分动箱参数优化的数学模型为:
min()=(1()2())T。

3 基于改进PSO算法的分动箱优化
3.1 改进PSO算法设计
基于SHI等提出的线性递减权值(LDW)PSO算法[13–15],提出一种新的自适应动态改变惯性权重的PSO算法策略,将整个迭代周期分为前期(I)、中期(II)、后期(III)3个子周期,在每个子周期里,惯性权重在合适的区间范围内波动。改进PSO策略如下。
1) 在周期I中,惯性权重线性递减,即=max–ωt,为迭代代数,当粒子群适应度值变化速度下降至初始变化率的倍时,可调,设置=0.1,认为粒子群已经处于最优解附近,此时进入周期II。
2) 在周期II中,将粒子分为两部分,一部分粒子采用惯性权重线性递减策略(定义为局部探索粒子),另一部分粒子(定义为全局探索粒子)在迭代过程中加入一定量的常数扰动(为了防止有极小可能使得粒子陷入局部最优的情况,对部分粒子的惯性权重加入随机扰动,目的是探索是否有比历史搜索空间范围内的所有粒子更优的解)。此时粒子群群算法更新迭代计算公式如下:
v(+1)=ωv()+11()(p()–x())+22()(p()–x());
x(+1)=x()+v(+1);
=max–ωt+R,R∈[0,0.1]。 (5)
其中R为扰动常数,在一定的扰动概率下取R为0.1。

v(+1)=ωv()+11()(p()–x())+22()(p()–x());
x(+1)=x()+v(+1);
=(max–ωt)r+R,∈[0.9,1.1]。 (6)
为了防止粒子聚集导致损失多样性,还要在后期引入随机个体来保持粒子群的多样性。在25%的概率下,将解空间里的某一随机个体与粒子群算法得到的粒子进行相应替换。一般在较小概率的引入随机个体,不会影响粒子群算法实际的迭代趋势。
3.2 优化结果
为了验证改进PSO算法策略的有效性,分别采用基本粒子群算法和改进粒子群算法对分动箱齿轮适应度函数进行优化设计,种群规模设置为20,最大迭代次数迭代300次。优化迭代过程如图2所示。
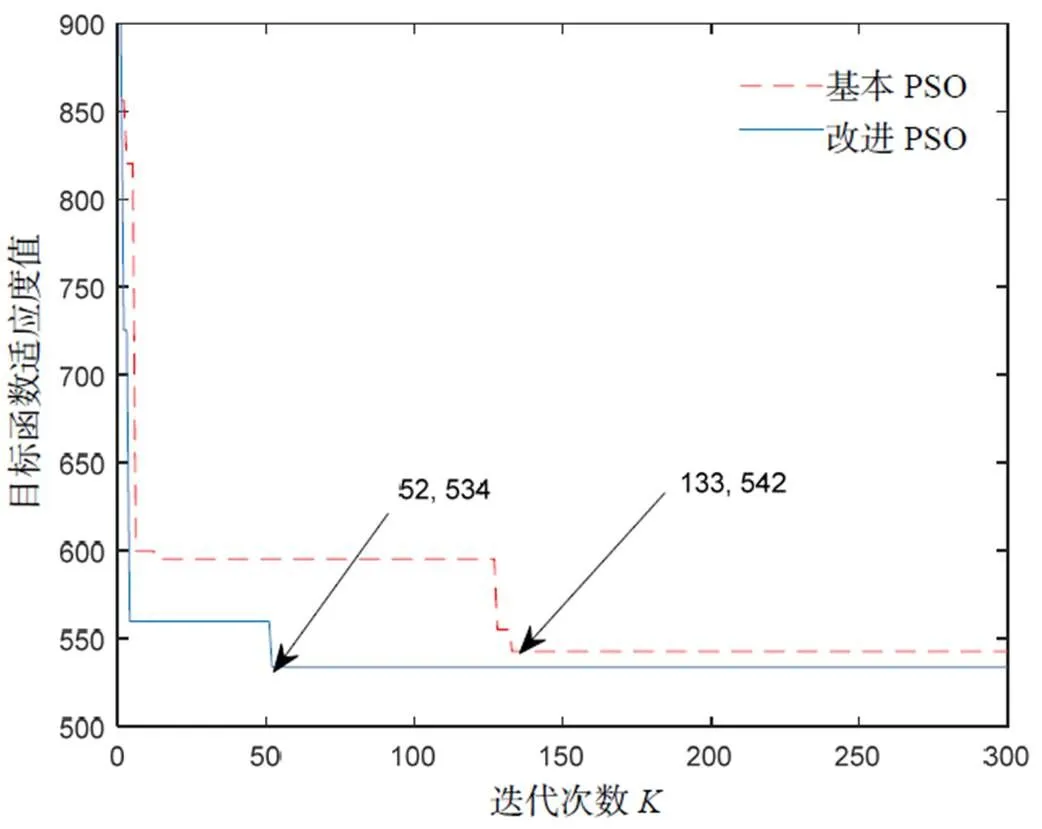
图2 基于改进PSO算法的分动箱优化迭代过程
改进PSO算法经过52次迭代后收敛,收敛速度明显优于PSO算法;改进PSO算法在收敛精度方面也较PSO寻找到了更优的解。优化后的结果如表1所示。
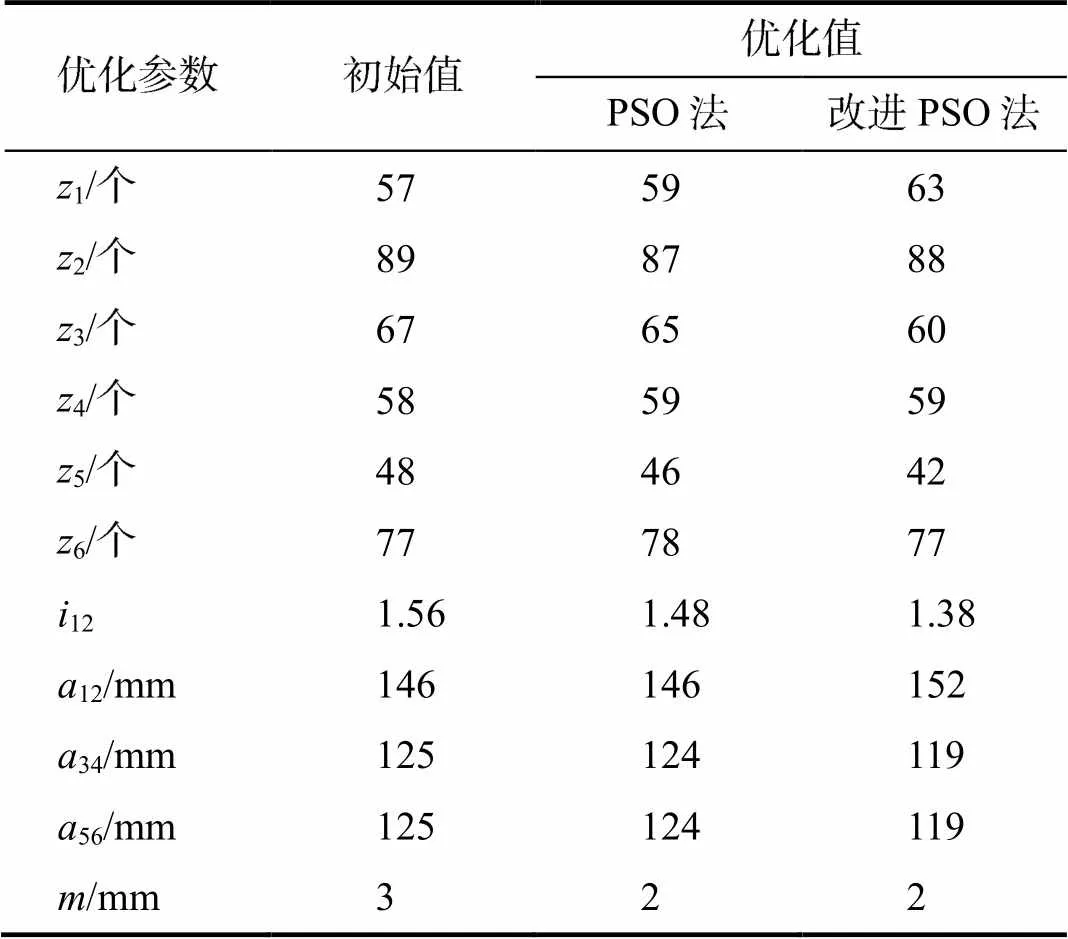
表1 优化的结果与初始值对比
结果表明,在总分动箱总的中心距方面,PSO法与改进PSO法均满足中心距最小约束值270 mm;在齿轮总体积方面,PSO算法使得齿轮总体积减小了1.4%,改进PSO算法使得齿轮总体积减小了2.9%,相较于PSO算法,改进PSO算法的优化精度提高了1.5%。
4 分动箱运动学仿真
基于多体动力学软件SimulationX,对优化后的分动箱进行运动学仿真。仿真中设置第一级减速齿轮,减速比为优化后的12=1.38,第二级减速高速档,减速比为34=0.98,第三级减速低速档,减速比34=1.81,仿真时间为40 s,仿真结果如图3所示。当发动机逐渐加速到额定转速1 500 r/min后,保持其额定转速不变,分动箱的高档位输出转速约为1 100 r/min,低档位输出转速约为600 r/min。仿真结果表明优化后的分动箱满足设计要求。

图3 分动箱转速仿真结果
5 分动箱性能验证试验
如图4所示,搭建串联式混合动力拖拉机试验平台,对设计的分动箱PTO动力性能进行试验。首先将发动机维持在额定转速1 500 r/min附近,将分动箱分别调入低档、高档,利用设置在PTO后的磁粉制动器,逐渐对分动箱PTO进行加载,通过设置在发动机输出轴与分动箱输入轴之间的扭矩转速传感器、分动箱PTO之后的扭矩转速传感器,分别测量分动箱处在低档、高档时的转速转矩,输出功率等。
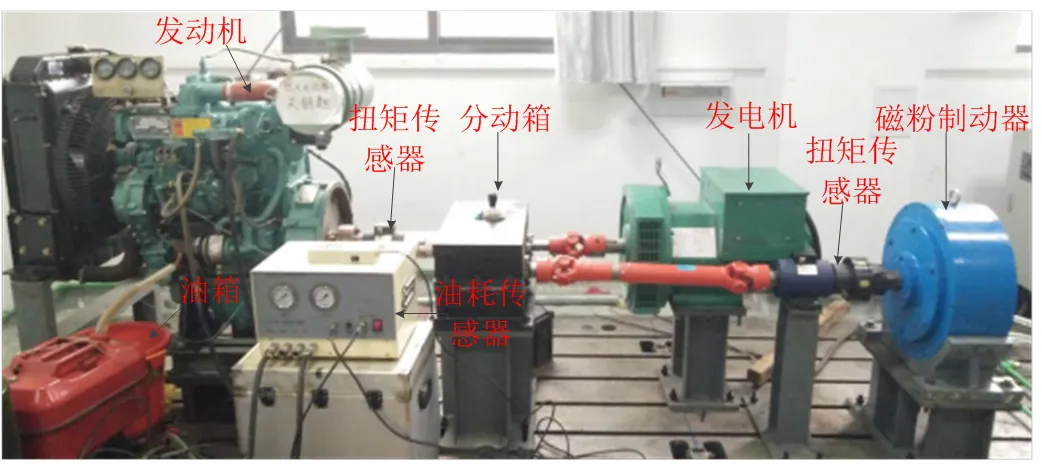
图4 串联式混合动力拖拉机试验台
当发动机的转速维持在额定转速附近时,将分动箱分别调入低档、高档,测得PTO转速如图5所示。高速档和低速档输出转速均满足不低于标准转速1 000 r/min和540 r/min。
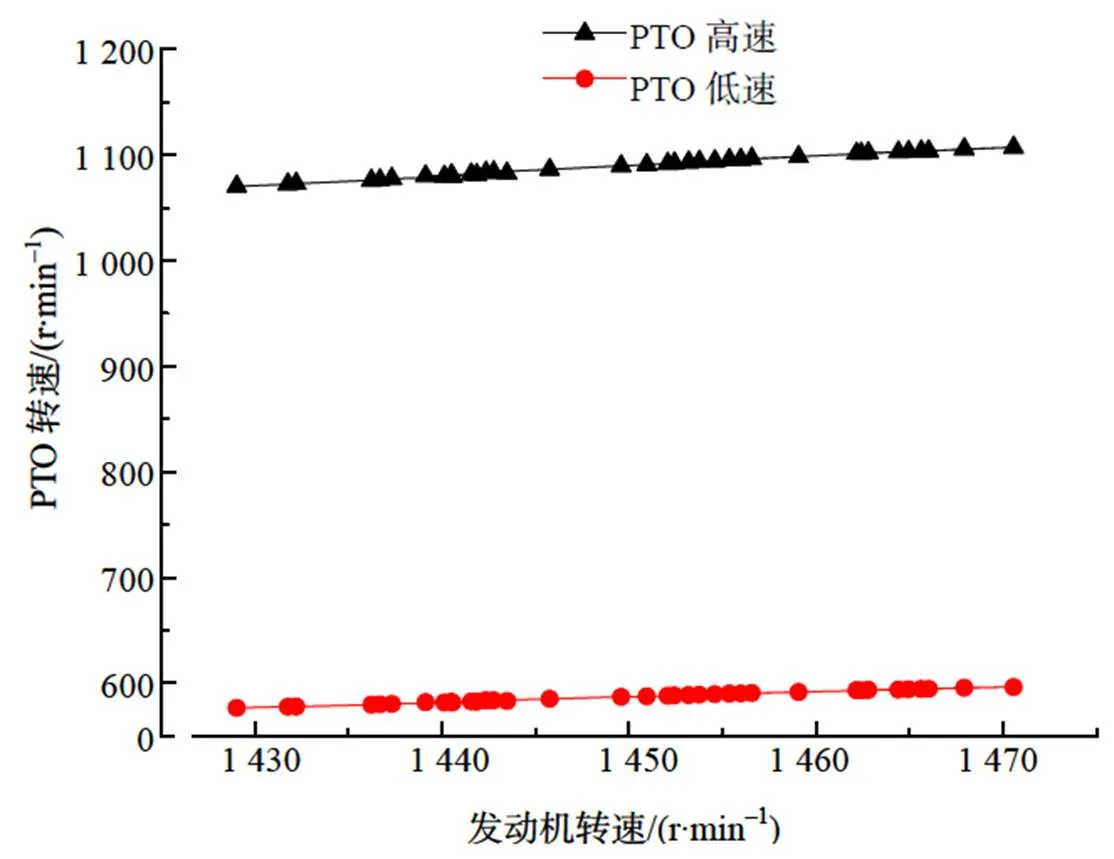
图5 分动箱PTO转速
PTO输出功率如图6所示。最大功率均可达35.3 kW。
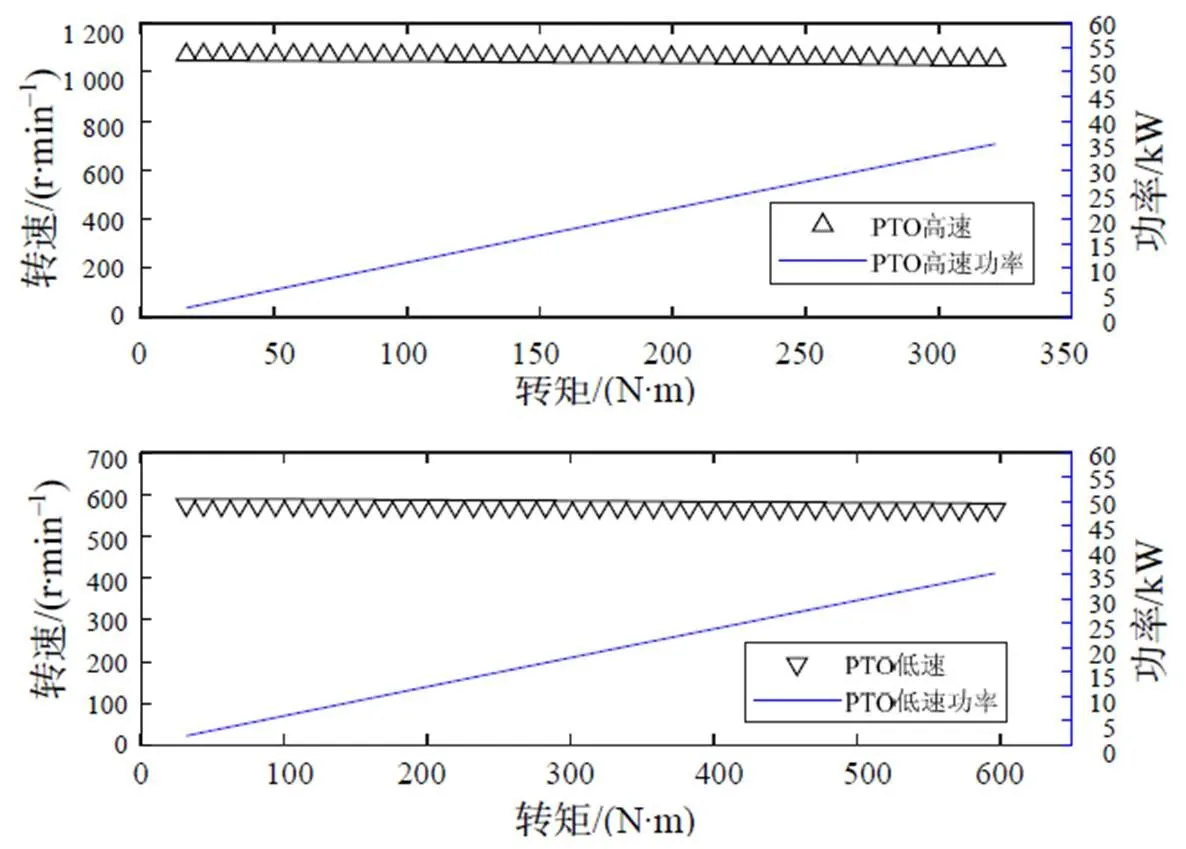
图6 PTO高速和低速的负载特性
依据文献[16],当混合动力拖拉机通过PTO连接旋耕装置进行旋耕作业时,PTO所需功率为P。

式中:k为旋耕比阻(kPa);B为耕幅(m);为耕深(cm);m为拖拉机使用质量;为重力加速度(m/s2);为滚动阻力系数;为旋耕时混合动力拖拉机的行驶速度(km/h)。
设混合动力拖拉机结构质量为1 600 kg,取9.8 m/s2,拖拉机处于旋耕工况时,土壤设定为留茬地,旋耕比阻为80 kPa,滚动阻力系数为0.08,配套旋耕机型号为1GQN–150,质量为240 kg,耕幅1.5 m,耕深12~16 cm,旋耕速度为2~5 km/h。可以得出,当耕深为12 cm,速度为2 km/h时,PTO输出的功率为10.56 kW;当耕深为16 cm,速度为5 km/h时,PTO输出的功率为34.4 kW,即当旋耕机正常工作时,PTO需要输出的功率为10.56~ 34.4 kW。而由图6可知,无论分动箱处于高档还是低档位置,在PTO转速范围内,输出的最大功率均可以达到35.3 kW,完全可以保证配套旋耕机对PTO的功率需求,且能够进行较大耕深的作业;因此,设计的分动箱可满足配套旋耕机的工作要求。
[1] 张淑霞,王彬彬,陈凤涛,等.东方红–C1304型拖拉机动力输出装置结构分析[J].农业装备与车辆工程,2012,50(2):8–9,29.
ZHANG S X,WANG B B,CHEN F T,et al. Structural analysis of power output device of Dongfanghong -C1304 tractor [J].Agricultural Equipment and Vehicle Engineering,2012,50(2):8–9,29.
[2] FRANTZ U G,SCHLOSSER J F,FARIAS M S D,et al.Energy efficiency of a tractor using two configurations of power take-off[J].Ciência Rural,2014,44(14):1219–1222.
[3] ROEBER J B,PITLA S K,HOY R M,et al.Tractor power take-off torque measurement and data acquisition system[J].Applied Engineering in Agriculture,2017,33(5):679–686.
[4] 王小冰.新型混合动力拖拉机驱动系统设计及仿真[D].南京:南京农业大学,2016.
WANG X B.Design and simulation of a new hybrid tractor drive system [D].Nanjing:Nanjing Agricultural University,2016.
[5] 侯辛奋.串联式混合动力拖拉机驱动系统的设计与性能分析[D].南京:南京农业大学,2017.
HOU X F.Design and performance analysis of tandem hybrid tractor drive system[D].Nanjing:Nanjing Agricul- tural University,2017.
[6] 朱成实,勾延生,李铁军,等.基于改进PSO算法的数控机床主轴优化设计[J].中国机械工程,2015,26(20):2784–2788.
ZHU C S,GOU Y S,LI T J,et al.Optimal design of CNC machine tool spindle based on improved PSO algorithm[J]. China Mechanical Engineering,2015,26(20):2784–2788.
[7] 李慧良.正确使用拖拉机动力输出轴[J].农机使用与维修,2013(12):50–51.
LI H L.Correct use of tractor power output shaft[J]. Agricultural Machinery Use and Maintenance,2013(12):50–51.
[8] 鲁植雄,周润东,骆光炬,等.一种后置、独立式串联式混合动力拖拉机动力分配装置: 201820140588.4[P]. 2018–11–15.
LU Z X,ZHOU R D,LUO G J,et al.A rear-mounted,independent tandem hybrid tractor power distribution device:201820140588.4[P].2018–11–15.
[9] 西北工业大学机械原理及机械零件教研室.机械设计[M].北京:高等教育出版社,2006:186–189,356–380.
Department of Mechanical Principles and Mechanical Parts,Northwestern Polytechnical University. Mechanical Design[M].Beijing:Higher Education Press,2006:186–189,356–380.
[10] 李忠权.拖拉机动力输出轴结构特点与使用要点[J].农机使用与维修,2014(10):64.
LI Z Q.Structural characteristics and operating points of tractor power output shaft[J].Use and Maintenance of Agricultural Machinery,2014(10):64.
[11] 廖汉平.我国拖拉机动力输出轴标准修订方案的研究[J].拖拉机与农用运输车,2016,43(2):62–66.
LIAO H P.Research on the revision scheme of tractor power output shaft standard in China[J].Tractor and Agricultural Transporter,2016,43(2):62–66.
[12] 吴宗泽.机械零件设计手册[K].北京:机械工业出版社,2004:643.
WU Z Z.Mechanical Parts Design Manual [K].Beijing:Machinery Industry Press,2004:643.
[13] SHI Y H,EBERHART R C.A modified particle swarm optimizer[C]//Proceedings of the IEEE Congress on Evolutionary Computation.Piscataway:IEEE Service Center,1998:69–73.
[14] SHI Y H,EBERHART R C.Empirical study of particle swarm optimization [C]//Proceeding of Congress on Evolutionary Computation .Piscataway:IEEE Service Center,1999:1945–1949.
[15] SHI Y H,EBERHART R C.Fuzzy adaptive particle swarm optimization [C]//Proceedings of the Congress on Evolutionary Computation.Xplore:IEEE,2001:101–106.
[16] 机械电子工业部洛阳拖拉机研究所.拖拉机设计手册[K].北京:机械工业出版社,1994. Luoyang Tractor Research Institute,Ministry of Mechanical and Electronic Industry.Tractor Design Manual[K].Beijing:China Machine Press,1994.
Design and test of the gearbox in the tandem hybrid power tractor
ZHOU Rundong1, LU Zhixiong1*, DENG Xiaoting1, HOU Xinfen2
(1.College of Engineering, Nanjing Agricultural University, Nanjing, Jiangsu 210031, China; 2.SAIC Datong Automobile Ltd, Shanghai, 200438, China)
The designed tandem hybrid power box is composed of the input shaft, the intermediate shaft, the output shaft, the shaft gear and a pair of slip gear. In order to reduce the volume of the serial hybrid tractor divider box and meet the larger tillage requirement of the supporting rotary tiller, the mathematical model of the gearbox parameter optimization was established by taking the minimum total center distance and the total volume of the gear box as the objective function under the constraint conditions of the structure, the strength and the stiffness. A parameter optimization strategy (PSO) is adopted based on the improved particle swarm optimization algorithm. The optimization results show that compared with the basic particle swarm optimization algorithm, the improved particle swarm optimization algorithm significantly improves the convergence speed and convergence accuracy, with the improved gear volume reduced by 2.9% and the optimization accuracy increased by 1.5%. The kinematic simulation and test results of the gearbox show that the PTO dynamic performance of the optimized gearbox meets the requirements of the power and the working requirements of the supporting rotary tiller.
hybrid power tractor; gearbox volume; mathematical model; improved PSO; dynamic performance
10.13,331/j.cnki.jhau.2020.01.016
S219.89;S220.2
A
1007-1032(2020)01-0107-06
2019–04–10
2019–12–10
国家重点研发计划项目(2016YFD0701103)
周润东(1993—),男,江苏淮安人,硕士研究生,主要从事混合动力拖拉机动力系统设计、车辆电子控制技术研究,ericzhou3031 3223@163.com;
,鲁植雄,博士,教授,主要从事车辆电子控制技术、车辆动力学研究,2017112009@njau.edu.cn
周润东,鲁植雄,邓晓亭,侯辛奋.串联式混合动力拖拉机分动箱的设计与试验[J].湖南农业大学学报(自然科学版),2020,46(1):107–112.
ZHOU R D, LU Z X, DENG X T, HOU X F. Design and test of the gearbox in the tandem hybrid power tractor[J].Journal of Hunan Agricultural University(Natural Sciences), 2020, 46(1): 107–112.
http://xb.hunau.edu.cn
责任编辑:罗慧敏
英文编辑:吴志立
