中美欧日韩人工智能技术差距测度与比较研究
2020-03-25周松兰
周松兰
(广州大学 经济与统计学院,广东 广州 510006)
一、引 言
人工智能是引领新一轮科技革命和产业变革的战略性技术,正在深刻改变着人类生活生产方式和创新范式,成为国际价值链重组和争创未来领跑先发优势的关键领域,引发世界多国抢先布局。中国实施创新驱动“非对称”赶超战略,基于多年持续积累,在人工智能等先导领域形成了创新发展的独特优势。国际科技论文发表量和专利授权量名列世界前茅,技术创新呈现跟跑、并跑和领跑(下称“三跑”)并存格局。而对此众说纷纭,不乏唱衰或捧杀。因此,科学测度其技术水平并剖析“三跑”差距,是创新路线、科学决策和深入研究的前提,直接关系到我们对未来发展的安排和部署,也是战略研究者需要深入研究并予以回答的问题[1]。
新科技革命先导技术的差距与竞争,集中体现为知识产权的差距与竞争。技术通过市场实现价值需知识产权制度保护,否则被无偿模仿而创新者蒙受损失甚至毫厘无收,会导致没人愿意创新的“公用地悲剧”。但这种制度也会给竞争者造成一定障碍,发达国家和跨国公司正是利用先发专利来布局控制全球产业链高端的,不仅增加领跑者竞争优势,同时诱导跟跑者模仿技术。跟跑形成模仿技术轨道依赖,极易长期囚于产业链低端。要素驱动主导阶段,基于技术差距和比较优势,中国不少传统产业形成跟跑技术依赖,现实问题是新兴产业重蹈覆辙迹象。在人工智能等先导技术新窗口领域,中国抢抓机遇初步奠定独特优势,而企业又将面临技术选择,进一步快速健康发展亦必须直面创新路线优化问题。
当前中国经济向高质量发展转型,建设科技强国,力争跃迁领跑,创新是第一动力,而以人工智能为核心的新科技革命先导技术是中国最有能力和最有希望实现跃迁的突破口[2]。习近平总书记在中共中央政治局第九次集体学习时,重申中国在新科技革命先导技术领域创新跃迁领跑的战略思想。他强调,人工智能是引领这一轮科技革命和产业变革的战略性技术,具有溢出带动性很强的“头雁”效应;加快发展新一代人工智能是我们赢得全球科技竞争主动权的重要战略抓手,是推动我国科技跨越发展、产业优化升级、生产力整体跃升的重要战略资源;我们必须加强分析,统筹谋划,协同创新,稳步推进,把增强原创能力作为重点,以关键核心技术为主攻方向,夯实新一代人工智能发展的基础;努力在人工智能发展方向和理论、方法、工具、系统等方面取得变革性、颠覆性突破,确保我国在人工智能这个重要领域的理论研究走在前面、关键核心技术占领制高点[3-5]。
在至关重要的新科技革命人工智能技术领域,科学测度技术差距具有重要意义。本研究跟踪上述前沿,探索创新跃迁规律,创立技术差距测度系统和数据库,尤其跟踪测度中美欧日韩在人工智能8个中分类、45个小分类技术领域的论文活动力、论文影响力、专利活动力、专利影响力、专利市场力等,以厘清差距,解码基源,据其提出的“三跑”各阶段战略策略优化方案和系列政策建议,可为相关研究和决策提供工具、数据和实证支持,对于促进新科技革命先导技术创新战略有效实施具有现实意义。
二、文献综述
(一)技术差距理论研究
世界经济发展不平衡首先表现为技术差距。围绕差距形成了主张跟跑的差距利益优势派理论和主张赶超的差距收敛派理论,各学派的经典理论和倾力主张都曾并正在深刻影响各国产业的技术路线选择与发展。
以格申克龙为代表后发优势理论主张模仿技术节省成本[6],但忽视模仿依赖的弊端;Felipe等和王宏广等的“陷阱”论只担心模仿依赖后果并不关注危险临界[7-15];克鲁格曼和Acemoglu等赶超理论主张先模仿再赶超,但也不能确定模仿临界[16-17];陆德明和李俊江等“最后最小差距”论提出模仿临界假说但缺乏实证支持[18-19]。这些争论,或助长技术模仿惯性无限期,或激进盲目赶超,扩散技术选择的理性迷茫。中国汽车和家电等传统产业在所谓雁阵中形成跟跑技术轨道依赖,而现实问题是战略性新兴产业初现重蹈覆辙迹象,诸如国内90%的LED企业已形成对日亚系蓝宝石技术依赖[20],陷于有了自主硅基技术企业却难接受“换血”的窘境。
(二)技术差距测度工具
基于波斯纳技术生产要素观点和可操作性[20],用生产效率或人均GDP差异代替技术差距的研究较多[21-24]。但技术差距的经济社会效益显著滞后,显性指标是多要素共同作用的结果,不具有直接采用的可测度性,而研发产出的专利和论文指标能比较准确地反映技术差距[25]。Schmookler、Bosworth等掀起以专利代表技术差距的热潮[26-31],更有世界知识产权组织(WIPO)的全球创新指数、世界经济论坛(WFE)的全球竞争力报告、欧洲(EU)的创新记分牌、中国科学技术发展战略研究院(CASTED)的国家创新指数、日本科技政策研究所(NISTEP)的科学技术指标,带动知识产权测度技术差距成为研究新潮主流[32-36]。经济合作与发展组织(OECD)的《2017年科学、技术与工业记分牌:数字化转型》报告采用国际专利分类IPC代码等组合识别法,检索发明专利家族(IP5)数据和最常引用科学出版物等指标,其技术差距测度方法大体代表了国际先进方法,操作复杂但具有较强的科学性与国际可比较性[37],见表1。

表1 技术差距测度系统科学性与国际通用性比较
资料来源:据文献归类整理自制。√表示系统科学性或国际通用性的强度。
(三)人工智能技术差距测度
代表文献可分为国家机构文献和知名咨询机构文献两大类。
第一类,国家机构文献。诸如,中国科学院科技战略咨询研究院的《2017研究前沿》报告和《2017研究前沿热度指数》报告(如表1国内文献3)、孙永福等的《引发产业变革的颠覆性技术内涵与遴选研究》、美国陆军部的《2016—2045年新兴科技趋势报告》、日本研究开发战略中心的《基于研究开发俯瞰报告书(2017年)的科学技术力国际比较》、韩国科学技术企划评价院的《2017年技术水准评价最终报告书》[38-42]。
第二类,知名咨询机构文献。诸如,美国麻省理工学院(MIT)的《MIT技术评论》、高德纳咨询的《2017技术成熟度曲线》、普华永道的《衡量人工智能所带来的影响:把握机遇》、科尔尼管理咨询的《大数据技术》、埃森哲咨询的《人工智能:经济发展新动力》、波士顿咨询的《全球工业机器人报告》、美银美林集团的《机器人革命》、科尔尼管理咨询的《3D打印:一场制造革命》、高盛集团的《九大颠覆性技术》、福布斯集团的《将改变世界的九股科技大趋势》、日本新能源产业技术综合开发机构(NEDO)的《新一代人工智能及机器人核心技术知识产权战略》、韩国现代经济研究院(HRI)的《第4次产业革命基础技术R& D国际比较》、乌镇智库的《2016全球人工智能发展报告》、阿里研究院的《人工智能影响力报告》[43-48]。
上述文献有的采用专利家族、三方专利、PCT和相关论文等指标,定期或择期进行人工智能等先导技术差距测度,但多流于宏观层面而深入具体技术细化分析少,或只限列举评价结果即止,缺乏科技战略与创新政策的科学分析。
(四)创新跃迁
第一,创新理论演进。收敛技术差距根本在于自主创新。创新学说源于熊彼特,宏观衍生出创新体系学说,微观细化到创新型企业评价,创新路线有自主创新、开放创新、协同创新和颠覆性创新,系统强调制度创新和技术创新融合相生,以创新驱动发展范式,形成创新生态,最新前沿有阿吉翁等为代表的新熊彼特主义创新理论[49-66]。这些研究在中国汇焦点于提高自主创新能力,并开始走向创新生态跃迁研究。
第二,自主创新跃迁领跑。习近平总书记精辟论述自主创新和“三跑”路线跃迁思想:核心技术受制于人是最大的隐患[67];关键核心技术是要不来、买不来、讨不来的;没有核心技术的优势就没有政治上的强势(1)见习近平在中国科学院第十九次院士大会、中国工程院第十四次院士大会上的讲话(2018年5月28日)。;所以要矢志不移自主创新;我们在一些领域已接近或达到世界先进水平,某些领域正由“跟跑者”向“并跑者”“领跑者”转变,完全有能力在新的起点上实现更大跨越(2)见习近平在参加全国政协十二届一次会议 科协、科技界委员会联组讨论时的讲话(2013年3月4日)。。从而指明了中国创新跃迁领跑的战略思想。
美国的《美国人工智能倡议》和欧盟的《欧洲研究区路线图》都力争抢先优化其创新领跑路线。日本《科学技术创新综合战略2018》提出超智慧社会5.0和第4次产业革命领跑战略。韩国成立第4次产业革命委员会,制定领跑第4次产业革命计划和路线图,力争在国家顶层设计上先行创新跃迁领跑战略。
中国的创新跃迁领跑战略已经提上日程,亟须相应的理论创新和消除模仿惯性阻碍,同时在实证研究支持方面需要进行国际比较,能否做到知己知彼,很大程度上取决于计量工具系统的科学性和国际通用性。
基于前述文献回顾,可知已有的相关研究主要有以下不足:
首先,对传统技术差距意识和模仿惯性滞阻创新跃迁的基源挖掘和科学治理研究。事实上,跟跑从行为惯性沉淀思维底层漫浸于技术政体,消费习惯于“原装进口”,技术路线过于偏重“短期”功利导向。跟跑惯性超期理直气壮,严重冲击创新跃迁领跑自信。
其次,国内研究及其采用的技术差距测度工具和指标,作为社会科学或宣传性简单数量描述者多,缺乏系统性、科学性和国际通用或可比性,难以适应新科技革命先导技术细粒性测度和国际比较的需要。
而以OECD的科学、技术与工业记分牌为代表的国际主流做法,通过国际IPC标准分类和ICT技术分类法,具体界定人工智能等新科技革命先导技术测度对象,采用标化评分模型、计量申请和授权专利、IP5家族专利、专利与论文被引用以及R& D等指标,科学性强,适于国际技术比较。
最后,长期以来国内相关研究多数以国际直接投资(FDI)吸纳技术溢出研究为重心,前沿研究范畴至赶超即止,极少关注领跑范畴。当前领跑已上升为国家战略,而领跑理论研究缺位,战略重心转型而理论研究重心没能适时前移。已有文献最大薄弱环节是对中国创新跃迁领跑与“三跑”内在本质必然联系及其相应路线和政策缺乏系统研究,中国创新跃迁领跑理论显然必须创新。
三、人工智能技术差距的计量模型与指标体系
(一)建立技术差距测度的计量模型
在作者先期相关研究成果新兴技术差距测度模型的基础上,融合Herfindahl和Balassa指数思想,基于技术领域论文和专利在样板国拥有量与各国总量、被引用数量与各国被引用总量间的诸种关系,构成论文活动力指数式(1)、论文影响力指数式(2)、专利活动力指数式(3)、专利影响力指数式(4)、专利市场力指数式(5)等,综合建立技术差距计量AIII(3)AIII为Artificial intelligence intellectual property index的缩写,意为人工智能等先导技术综合指数。模型式(6),在以式(6)计量取得测数值基础上,采用Gordon评分模型式(7)进行标化,以便进行技术差距国际比较和技术模仿临界诊断。
(1)论文活动力指数PpAI(paper activity index):
(1)
式中,Tij为在i技术领域j国发表论文数;nt为全体评价对象数(下同)。
(2)论文影响力指数PpCI(paper citation index):
(2)
式中,CTij为在i技术领域j国发表论文被引用数;Tij为在i技术领域j国发表论文数。
(3)专利活动力指数PtAI (patent activity index):
(3)
式中,APij为在i技术领域j国申请专利数。
(4)专利影响力指数PtCI(patent citation index):
(4)
式中,CPij为在i技术领域j国登记专利被引用数;RPij为在i技术领域j国登记专利件数。
(5)专利市场力指数PtMI (patent market-power index):
(5)
式中,nijk为在i技术领域j国于其专利家族k个国家所申请的专利件数;APij为在i技术领域j国申请专利件数;lijk为在i技术领域j国于其专利家族k个国家所登记的专利件数;RPij为在i技术领域j国登记专利件数。
(6)综合以上指数构建技术差距测度模型:
(6)
式中,P为权重;Li为5种知识产权指数之一的评分值。
(7)麦伦·戈登于1962年在《投资、融资和公司价值》一书中提出戈登(Gordon)模型,经后人不断发展衍生出系列变形模型,应用于国民经济、金融、产业、技术等许多方面,Gordon评分模型就是其中被广泛应用的一种。如2013年纳尔逊和汉德勒在区域比较技术的排名评分模型中,采用Gordon评分模型进行标化。本文以其计量结果最高者为100分,相对标化其余对象得分,并以10分为年单位比较技术差距:
(7)

(二)界定技术对象和选择样板数据
为避免技术评价简单粗糙而增加细粒化,具体通过国际标准产业分类(ISIC.Rev 4.0)和国际专利分类(Guide to the IPC,2018)界定人工智能8个中分类和45个小分类技术领域,对应上述标准的英文检索词(见表2),进入中国国家知识产权局(SIPO)、美国专利商标局(USPTO)、欧洲专利局(EPO)、日本特许厅(JPO)和韩国特许厅(KIPO)官网以及SCOPUS数据库官网,获取研究对象样板在比较区间的相关论文和专利数据。
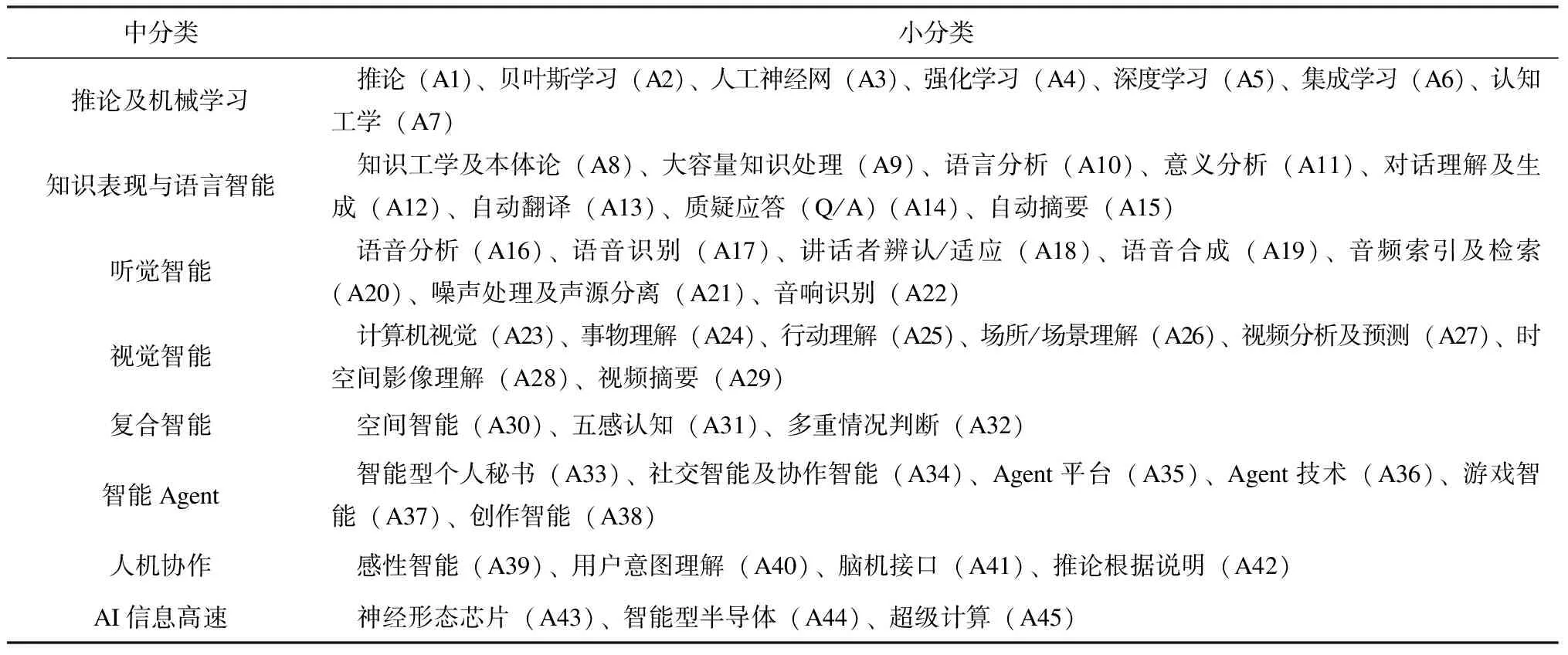
表2 人工智能技术领域研究对象细分
资料来源:据ISIC Rev 4.0和International Patent Classification (Version 2018)归类整理制表。
选择中国(大陆,下同)、美国、日本、韩国和欧盟五大经济体为研究对象样板,瑞士、英国列入分析对象,中国、美国、日本、韩国、德国、法国、瑞士、荷兰、英国、意大利、瑞典11国单列,欧盟其他国平均计为其他。鉴于专利滞后性,比较期间选择2005年1月1日至2016年12月31日,按前述路径和方法获取指标数据,构成测度指标体系。
四、人工智能技术差距的细粒性测度与国际比较
(一)人工智能论文数据计量与比较
第一,2014—2016年的检索数据显示,中国发表的人工智能技术研究论文以11 236篇超过美国的10 335篇,位列第一(见表3),引起世界高度关注。

表3 人工智能技术研究论文近期数量变化及国际比较 (篇)
资料来源:据SCOPUS数据库检索资料整理计算制表。
第二,2005—2016年期间的论文总量,中国有34 083篇,仅次于美国的37 262篇,位列第二;中国近3年论文占比较期总量比重为33.0%,在样板数据中最高。
第三,从人工智能技术45个细分领域论文及被引用论文90项数据总体看,美国有66项世界第一,中国有23项世界第一,除日本还有1项世界第一之外,中美两国囊括了所有数量第一。中国近期论文数量高于美国而在比较前期低于美国,但中国的问题是论文被引用偏少。平均论文被引用率依次为:瑞士12.68次/篇,美国12.32次/篇,荷兰11.73次/篇,英国11.26次/篇,瑞典9.88次/篇,德国9.11次/篇,意大利8.11次/篇,法国6.97次/篇,日本4.57次/篇,韩国4.31次/篇,中国3.59次/篇。中国论文被引用率低,客观上有近期论文可被引用期间太短的原因,而主要是论文质量低,隐含并昭示着由跟跑向领跑转变亟需提高自主创新和克服时空惯性阻力的含义。
第四,从论文项目数据看,中国人工智能研究论文数量领先的技术领域,主要集中于人工神经网(A3)、自动摘要(A15)、讲话者辨认/适应(A18)、语音合成(A19)、多重情况判断(A32)、社交智能及协作智能(A34)、Agent平台(A35)、Agent技术(A36)、游戏智能(A37)、感性智能等领域(A39);知识工学及本体论(A8)、噪声处理及声源分离(A21)、事物理解(A24)、行动理解(A25)、场所/场景理解(A26)、视频分析及预测(A27)、时空间影像理解(A28)、视频摘要(A29)、空间智能等领域论文数量较多(A30);智能型半导体(A44)与行动理解(A25)的论文数分别为2 336篇与2 254篇。中国深度学习(A5)与神经形态芯片(A43)的论文被引用率分别为8.06次/篇与6.62次/篇,在国内各细分领域居第一和第二位。同期美国智能型半导体(A44)与神经形态芯片(A43)论文分别为2 275篇与2 078篇,在其国内各细分领域居第一位。可见,论文最高数量差别不大,而问题在于论文被引用率差距悬殊。
第五,从人工智能论文活动力测度结果看,总体标化得分依次是:美国100.00,中国90.77,日本29.43,英国26.75,德国25.80,韩国19.32,法国17.12,意大利14.34,荷兰7.56,瑞士4.57,瑞典3.42。中国视觉智能、复合智能、智能Agent论文活动力世界领先,而美国囊括其余领域第一,即在推论及机械学习、知识表现与语言智能、听觉智能、人机协作、AI信息高速领域领先(见表4)。
资料来源:据SCOPUS数据库检索资料计算并制表。
第六,从人工智能论文影响力测度结果看,总体标化得分依次是:美国100.00,荷兰99.75,瑞士95.51,英国92.37,德国74.26,瑞典72.90,意大利68.64,法国60.93,日本42.04,韩国37.20,中国29.81列第11名。从中国国内细分领域横向看,知识表现与语言智能、智能Agent和AI信息高速领域的论文影响力较高。美国在智能Agent领域,瑞典在推论及机械学习领域,英国在知识表现与语言智能和听觉智能领域,瑞士在视觉智能、人机协作和AI信息高速领域,荷兰在复合智能领域,分别位居世界首位(见表4)。
第七,从人工智能论文指标测度综合结果看,总体标化得分依次是:美国100.00,中国62.72,英国57.06,荷兰50.20,德国48.00,瑞士47.07,意大利39.25,法国37.53,瑞典36.53,日本34.89,韩国27.32。综合测度结果说明,在人工智能研究领域美国最强,英、德等欧洲研究劲旅不可忽视,中国仅次于美国处于领先地位是肯定的。针对中国的论文影响力水平较低的现象,要在加大原始技术攻关力度和全面提高研究质量上实施冲刺阶段制度供给。
(二)人工智能专利数据计量与比较
第一,2014—2016年期间的数据显示,中国申请人工智能专利有4 997件,超过美国的4 203件(见表5),位列第一,引起世界高度关注。
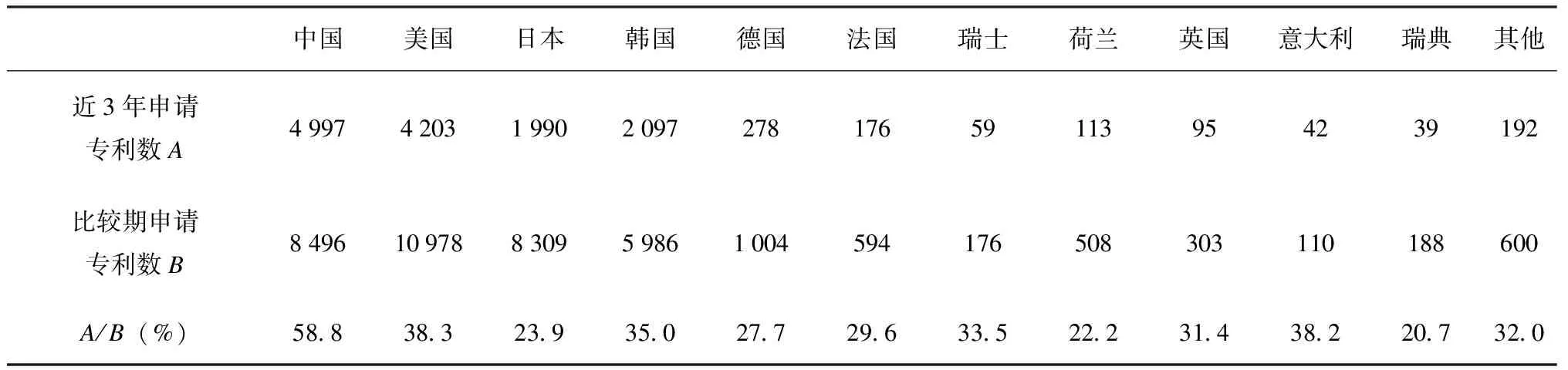
表5 人工智能技术专利近期数量及国际比较 (件)
资料来源:根据中国国家知识产权局、美国专利商标局、欧洲专利局、日本特许厅和韩国特许厅的公开数据进行检索,并计算制表。
第二,2005—2016年期间的申请专利总量,中国有8 496件,仅次于美国的10 978件,位列第二,中国近3年申请专利占总量比重58.8%在样板数据中最高。
第三,人工智能技术45个细分领域专利申请件数、家族数、被引用数和登记件数等180项基础数据显示,美国有149项世界第一,中国有24项世界第一,日本有7项世界第一,中、美、日三国囊括了所有第一。中国的问题是专利被引用偏少。登记专利总体平均被引用率依次为:美国9.73次/件,英国7.22次/件,瑞士5.85次/件,德国4.47次/件,意大利4.39次/件,日本3.40次/件,瑞典3.39次/件,荷兰2.69次/件,法国2.53次/件,韩国0.93次/件,中国0.10次/件。
第四,专利基础数据显示,在世界领先的技术细分领域中,中国人工智能申请专利和登记专利数量主要集中于贝叶斯学习(A2)、人工神经网(A3)、深度学习(A5)、集成学习(A6)、意义分析(A11)、讲话者辨认/适应(A18)、音频索引及检索(A20)、计算机视觉(A23)、场所/场景理解(A26)、时空间影像理解(A28)、视频摘要(A29)、空间智能(A30)、社交智能及协作智能(A34)、感性智能(A39)、用户意图理解(A40)、脑机接口(A41)、超级计算(A45)等17个技术细分领域(见表6)。
第五,人工智能专利活动力测度结果显示,总体标化得分依次是:美国100.00,中国96.30,日本73.34,韩国53.28,德国9.07,法国5.19,荷兰4.41,英国2.68,瑞典1.66,瑞士1.54,意大利1.05。中国在推论及机械学习、人机协作和AI信息高速领域,美国在知识表现与语言智能、听觉智能、复合智能、人机协作和智能Agent领域,日本在视觉智能领域,专利活动力分别位列世界第一(见表6)。
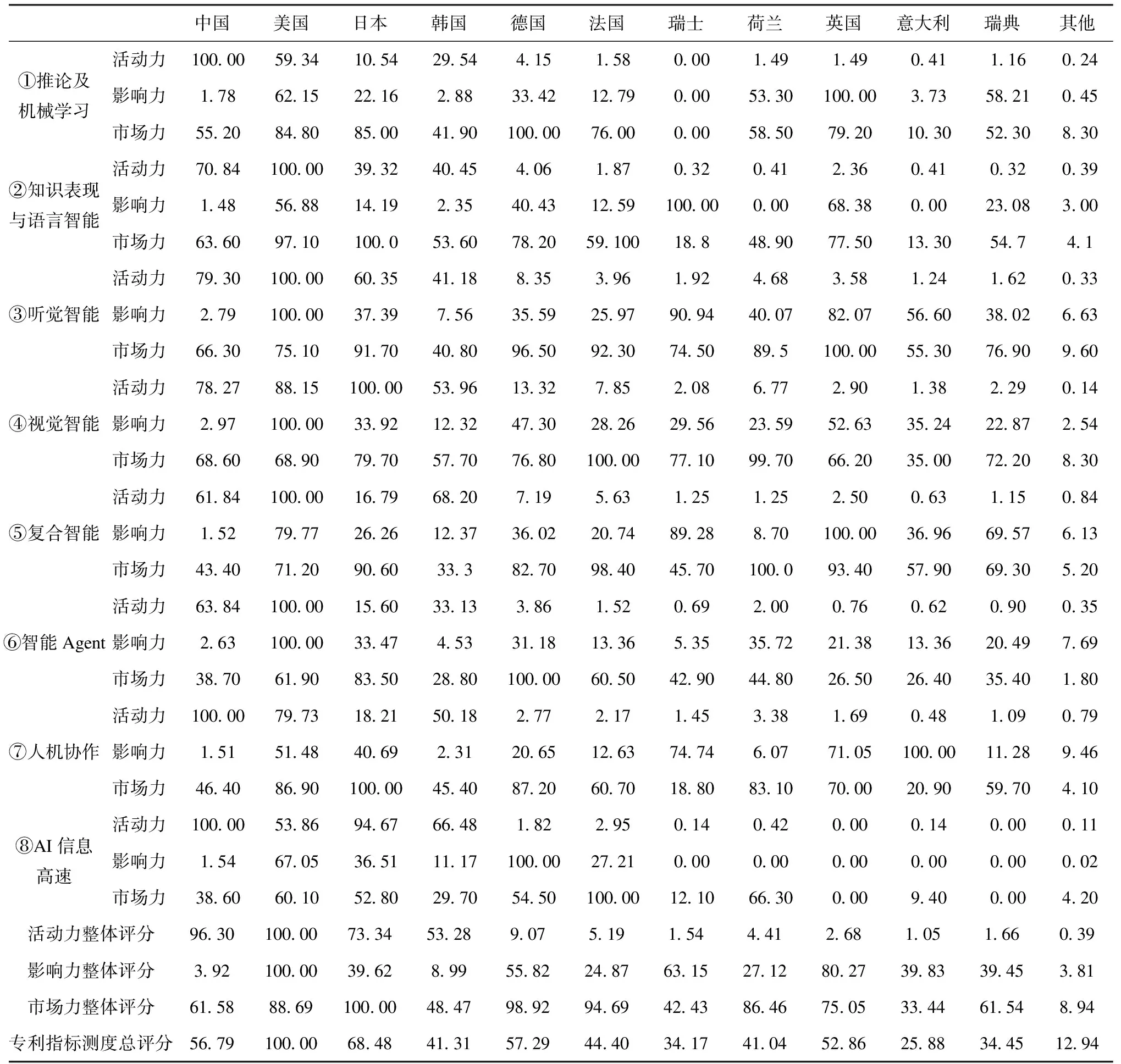
表6 人工智能技术专利活动力、影响力、市场力测度与比较
资料来源: 根据中国国家知识产权局、美国专利商标局、欧洲专利局、日本特许厅和韩国特许厅的公开数据进行检索,并计算制表。
第六,人工智能专利影响力测度结果显示,总体标化得分依次是:美国100.00,英国80.27,瑞士63.15,德国55.82,意大利39.83,日本39.62,瑞典39.45,荷兰27.12,法国24.87,韩国8.99,中国3.92。英国在推论及机械学习和复合智能领域,瑞士在知识表现与语言智能领域,美国在听觉智能、视觉智能和智能Agent领域,意大利在人机协作领域,德国在AI信息高速领域,专利影响力分别位列世界第一(见表6)。
第七,人工智能专利市场力测度结果显示,总体标化得分依次是:日本100.00,德国98.92,法国94.69,美国88.69,荷兰86.46,英国75.05,中国61.58,瑞典61.54,韩国48.47,瑞士42.43,意大利33.44。德国在推论及机械学习和智能Agent领域,日本在知识表现与语言智能和人机协作领域,英国在听觉智能领域,法国视觉智能和AI信息高速领域,荷兰在复合智能领域,专利的市场力分别名列世界第一。
第八,人工智能专利指标测度综合结果显示,总体标化得分依次是:美国100.00,日本68.48,德国57.29,中国56.79,英国52.86,法国44.40,韩国41.31,荷兰41.04,瑞士37.17,瑞典34.45,意大利25.88。专利指标综合测度结果说明,在人工智能领域技术专利方面美国世界第一,中、日、德、英势均力敌。
(三)人工智能技术综合评价与差距的国际比较
2005—2016年12年间的人工智能技术论文和专利指标综合测度结果,总体标化得分依次是:美国100.00,中国59.75,英国54.99,德国52.63,日本51.65,荷兰45.63,法国40.95,瑞士40.65,瑞典35.51,韩国34.32,意大利32.58。综合测度结果说明,在人工智能领域技术综合水平方面美国世界第一,中国居第二位,以小幅优势领先于英、德、日(见图1)。
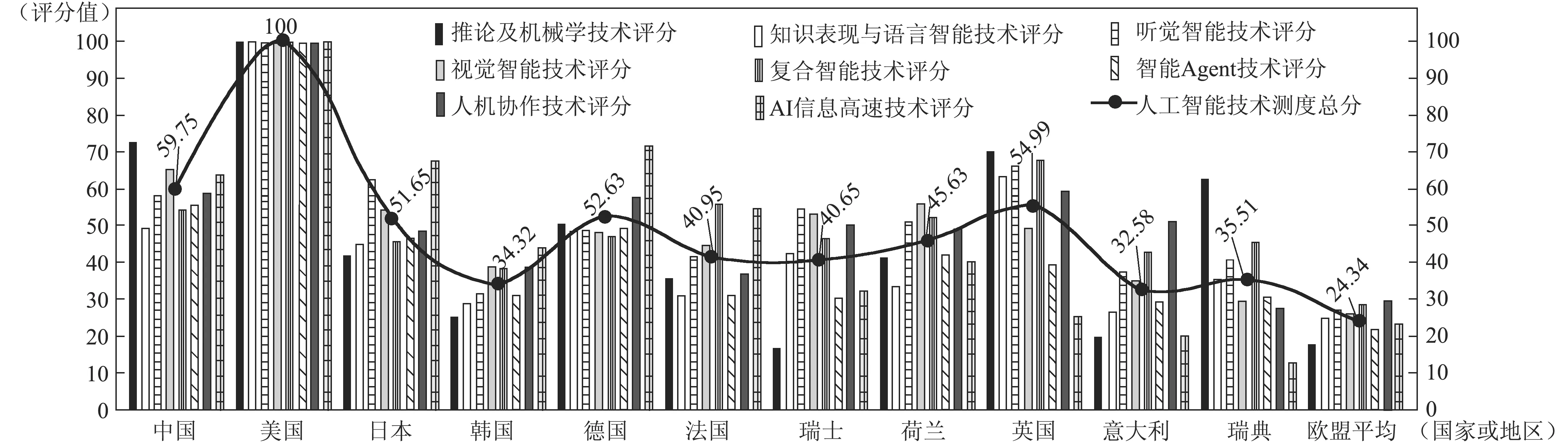
图1 人智能技术指标综合测度总分及国际比较
从综合测度结果标化后技术差距的时间看,中国总体落后美国约4年,领先韩国约2年,与日本、德国和英国大致持平。
而从2014—2016年来看,中国人工智能技术论文与专利数量已经超过美国,处于世界领先地位。
综合上述显性指标的计量结果,可以看出中国人工智能技术创新正处在一个十分关键的时期,有三层不容忽视的“三跑”特征。第一,从“三跑”阵营看,中国人工智能总体实力处于领跑阵营,但其中知识表现与语言智能技术前有领跑侧有并跑后有跟跑;第二,从“三跑”技术层次看,中国人工智能在推论及机械学习、听觉智能、视觉智能技术处于世界领跑,复合智能技术处于与美、英、德、日并跑,AI信息高速等技术还落后美国处于跟跑状态,其中领跑的技术缺乏颠覆性创新和产权战略、标准战略支持,并跑的技术主要体现为指标数量能并驾齐驱但缺乏技术质量支持,跟跑的基础工具性技术较多且受制于人;第三,从“三跑”阶段看,当前中国人工智能总体处于并跑阶段,并跑更为激烈的竞争与超越冲动,伴随跟跑遗留制度和惯力等问题,使创新路线优化的临界特征更为突出。
五、主要问题与基源分析
(一)跟跑的惯性羁绊
中国对于西方科学技术跟跑的思维惯性是根深蒂固的。中国封建社会的教育系统中科技教育长期缺位,统治者及知识分子更热衷于治世而疏于制“天”。近代,我国屡次与科技革命失之交臂,在落后挨打中开放国门,而随着“洋货”依赖到“洋技术”依赖,跟跑惯性沉淀于思想文化。
中华人民共和国成立后,不仅确立和弘扬独立自主、自力更生精神,还开启了工业及其科技系统研究。但在改革开放后约20年里也经历过“技术路线”的动摇——“外国技术一定先进、中国技术一定落后”的社会心理时代,消费者习惯买“原装进口”商品,有些政策把“引进国外先进技术”规定为唯一的技术来源,割裂了技术引进与自主开发之间的联系。企业因跟跑成本沉没、资源禁锢和制度惯性而组织生态固化,尤其是认知顽疾更加削弱创新自信。长期跟跑形成的思维惯性、政策惯性和组织惯性阻碍着中国一些企业自主创新崛起为领跑者[68-70]。
新兴产业发展之初,部分地方政府和企业急于追求短期效益一哄而起,习惯性选择国外技术和设备引进,在低端加工环节恶性竞争,诸如LED及光伏[71]等新兴产业,已形成产能过剩和新的技术轨道依赖。
截至目前,人工智能产业尚未大批出现上述情形,并不是所有地方政府和企业已经没有外来技术习惯性跟跑的内在冲动,而主要是由于两方面原因:一是人工智能技术系统高新而复杂,人工智能对创新的影响范式发生革命性变化[72],对技术门槛要求与多数企业产能基础及其现存技术能力相差甚远,不易一哄而起简单跟跑;二是人工智能正处于期望膨胀和关键核心技术的瓶颈期,基础理论与应用、高端设备与建设、多数人工智能产品的精确度和可靠度都有待提高,还没有到普及形成产业化的阶段。
(二)并跑尤其转型领跑的基础性支持缺乏准备
中国科技从跟跑、并跑跃迁到领跑的时代,处于新科技革命影响的扩张期,人工智能既是竞跑主戏又是工具,到2030年人工智能可为世界贡献13万亿美元新增价值,平均每年推动GDP约1.2%的增长[9],远超历史上其他技术革命的影响,但人工智能所带来的利益不会平均分配,而最终取决于人们以何种路径迎接的准备程度和抢先速度。人工智能鸿沟会导致数字鸿沟进一步加深,结果会扩大不同国家/地区、企业和劳动者之间的技术水平和贫富差距。为监测和应对上述差距和鸿沟,国内外已有“自动化准备就绪指数”“智慧化发展指数”“工业智能化准备指数”,美国发布《为人工智能的未来做好准备》的报告和系列政策,中国已出台《“互联网+”人工智能三年行动实施方案》《新一代人工智能发展规划》和《高等学校人工智能创新行动计划》等一系列顶层设计文件,但实践上还缺乏支持学习和部署的基础性和广泛性准备。
(三)创新人才瓶颈
新科技创新的竞争本质是人才的竞争,人工智能领跑主要取决于创新人才,当今世界,上至发达国家政府,下至科技巨头AI创业公司,无不将吸纳AI高端领跑人才视为提升自身核心竞争力的根本性举措。截至2017年初,全球人工智能领域现存190万人技术人才中,美国最多,拥有85万人,中国只有5万多人列全球第七位;中国人工智能人才10年从业者仅占38.7%,而美国同类比例高达71.5%。中国人工智能人才供求比例为1∶10,严重失衡,人才缺口超过500万,而且随着人工智能企业增多,人才缺口还在迅速扩大。能够领跑AI发展的顶级人才,环顾全球尚不足千人,而且大多生活工作在美国,中国拥有海外工作经历的AI技术人才43.9%来自美国。中国人工智能人才集中于应用端,核心环节的基础理论与技术研发人才少,源于教育薄弱。目前,全球共有367所具有人工智能研究专业的高校,美国拥有168所,中国只有20所[73]。我国学界倡导多年的建设“智能科学与技术”一级学科的问题仍待解决,人工智能领军人才和博士团队极缺,核心技术人才梯次无法形成,海外优势人才被欧美机构抢走。我国青少年人工智能基础教育落后欧美,可持续发展乏力。我国人工智能最大的问题是遭遇创新人才瓶颈,建设高端人才队伍已成为人工智能发展的重中之重。
六、创新路线优化的政策建议
第一,突破人才瓶颈。收敛技术差距,实现赶超领跑,根本在于优化人的知识结构和能力。长期政策应坚持促进教育向创造和创新教育为主转型,从童子军抓起,普及智能信息能力素质教育。当前政策侧重改善人才发展环境,激发人才创造活力,持续大批培养和集聚全球视野和国际水平的战略科技领军人才、青年科技人才、高水平创新团队和理工博士群。
第二,决策机制智能化转型。健全颠覆性技术预测和跟踪评估战略战术系统,建立技术引进的专业咨询与认证准入制度、企业自我诊断和专业监测管理相结合的技术模仿临界诊断机制。战略决策机制逐步从传统模式向智慧化转型,运用人工智能和大数据技术提供系统的战略评估和精准的战略决策方案。
第三,政策激励重点转型。从支持跟跑向支持领跑转型,减少竞争性基础研究经费转为财政定向直拨。政策重点转向激励科学工作者的主观能动创造性,绩效评价方面要避免、减轻对创新失败或短期无知识产权成果所受各种外部压力。
第四,加强领跑研究。针对世情国情,围绕跃迁领跑,加强学术研究和科学设计,加强基础优化,相应系统配套政策支持。尤其注重由点到面开展“激活智慧细胞”工程,消除数字鸿沟,在居民、企业、机关、城乡和可能空间,建立万物互联基础软、硬件条件,加强泛在融合应用,从根本上准备好支持人工智能领跑数字经济。
第五,加速产业化。从建设和普及创新型产业集群+智能云制造系统平台,逐步向社会信息物理系统(SCPPS)智能创新机制过渡,加强“官产学研用”协同和开放创新,推动创新成果产业化,同时发挥中国市场、大数据和政策体系优势,扩大应用拉动产业化。
