四足机器人越障能力分析
2020-03-24李华莹晁智强韩寿松谭永营
李华莹,晁智强,韩寿松,李 勋,谭永营
(陆军装甲兵学院, 北京 100072)
0 引言
难以通过野外环境中的障碍物是限制机器人实用化进程的问题之一[1],因此研究四足机器人的越障能力有十分重要的现实意义。
本文针对四足机器人越障,研究了野外环境绝大多数障碍物的特点,分析了单个四足机器人所能跨越障碍的最大高度,最终对两个四足机器人在协同情况下的越障能力进行了分析。
1 四足机器人结构
本文所采用的四足机器人结构如图1,该四足机器人是在某机器人的基础上进行改进设计的,主要进行了腿部尺寸的改进设计,腿部尺寸改进后的新髋侧摆关节竖直方向的长度为10 cm,大腿段和小腿段的长度均为40 cm。

图1 四足机器人机械结构
2 非结构地形典型障碍分析
四足机器人在非结构地形中经常会遇到坑洼、凸起等障碍。由于非结构地形中各种障碍的形状、高差、坡度等参数不尽相同且毫无规律可言,因此四足机器人必须在越障前通过感知传感系统获取障碍物的特征参数[3],然后根据特征参数将障碍物进行归类,根据障碍物类型的不同采取不同的越障策略。
根据自然环境中常见障碍的特征,可以将障碍分为凸起和坑洼,同时根据不同障碍的坡度,可以分为斜坡和台阶,如图2所示。
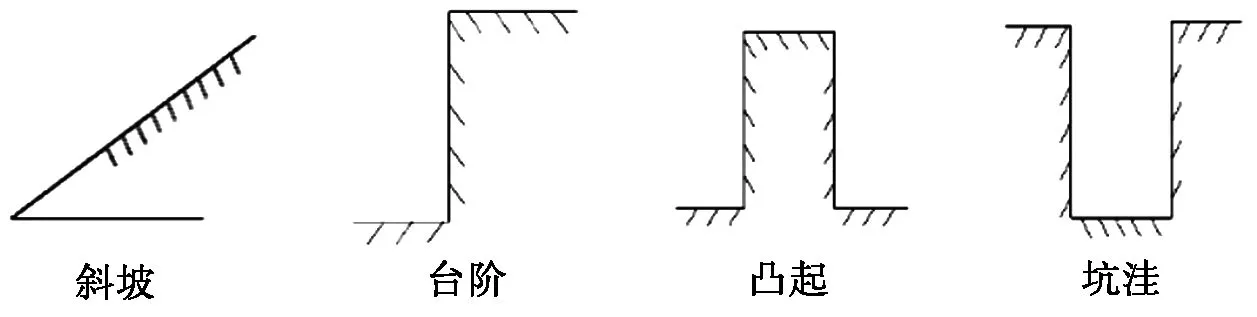
图2 典型障碍
一般情况下,四足机器人只采用静步态完成障碍跨越。四足机器人可以跨越凸起的充分条件是机器人的腿部抬起高度可以超越凸起的高度,同时该条件也是机器人可以攀登台阶的条件之一。
3 单个机器人越障能力分析
四足机器人主要通过腿部摆动跨越障碍物,因此其越障能力主要受到腿部摆动高度以及迈步距离的限制。由于绝大多数足式机器人足端运动轨迹曲线采用三次B样条曲线,在腿部迈步距离相对确定时,足端抬起高度只与起步角、落步角有关[4]。因此,根据非典型地形的几何特征选择合适的起步角以及落步角,对于提高机器人跨越障碍的能力具有重要的意义。
通过分析四足机器人越障过程,可以发现机器人跨越障碍失败主要有以下几点原因:
1) 机器人跨越障碍过程中关节力矩需求超过自身机构关节力矩限制,从而导致驱动力不足,机器人“腿软”,跨越障碍失败。
2) 机器人自身系统存在稳定性缺陷,比如稳定裕度不足导致失稳等问题导致的跨越障碍失败。
首先分析机器人攀爬单一高度台阶过程[2]。台阶高度设定为20 cm。机器人攀爬之前各腿相位相同,前腿紧靠障碍物(即前腿迈步一次即可登上台阶)。
为保证关节摆角不超过其结构摆角限制,首先分析足端的初始位置以及起步角、落步角。腿1足端在其足端运动空间中的运动规律如图3。图3中白色曲线1为上台阶过程中腿1足端的运动轨迹,白色曲线2为前后腿在水平地面运动时足端在单腿坐标系中的运动轨迹。通过分析足端运动空间可得:四足机器人攀爬20cm高的台阶过程中单腿绝对步距为300 mm,攀爬完成后足端纵坐标为0.7 m,横坐标为0.2 m。上台阶时足端起步角为70°,落步角为30°(在平面上运动时前后腿足端起步角与落步角均为46.5°[7])。

图3 腿1足端在其足端运动空间中的运动规律
由图3所得,机器人在攀登20 cm台阶时不需要针对机体倾角进行调整,但是必须向侧面摆动一定角度以增大机器人攀登过程中的稳定裕度[5]。实验中,四足机器人的稳定裕度为70 mm。通过对四足机器人的运动学分析,可以获得攀爬过程中各关节角度的变化规律,如图4所示。
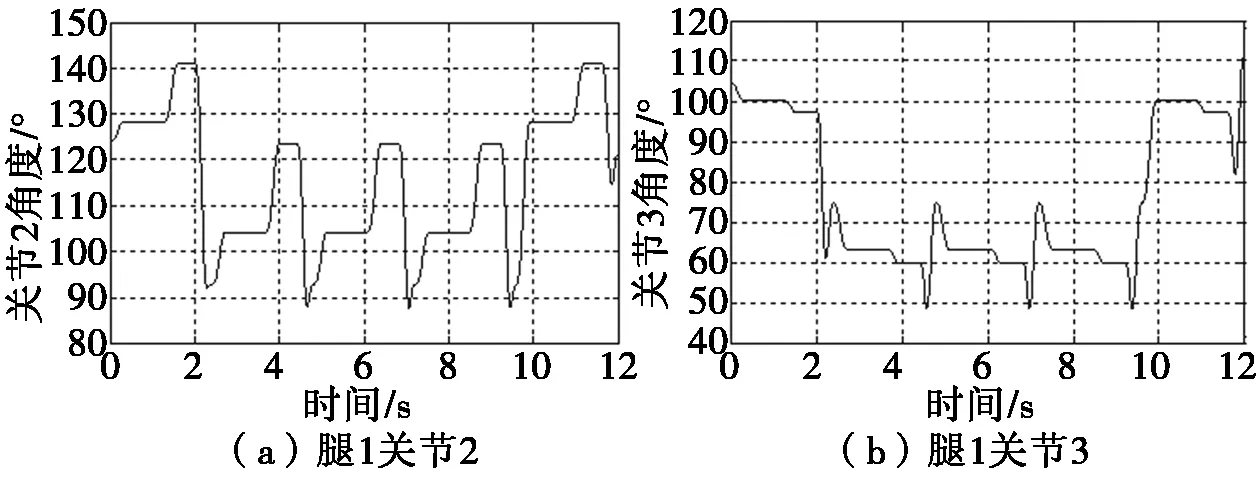
图4 攀爬20 cm台阶腿1各驱动关节角度变化规律
由图4可得,机器人攀爬台阶过程中,腿部各关节角度均在允许范围内变化,充分证明了利用足端运动空间作为攀爬台阶实验的判定标准是准确合理的。
在现实情况中,机器人不可能在理想情况下运动,比如在攀爬台阶过程中,前后腿运动误差对机体挤压形成挤压力,造成了关节力矩的损耗。因此在攀爬过程中,需要各关节执行元件能够提供额外30%的关节力矩。
液压缸提供的最大力矩能够满足各关节需求,即四足机器人可以依靠自身能力完成20 cm台阶的攀爬。为研究单个机器人在攀爬台阶时的台阶极限高度,将台阶增高为30 cm,实验条件与攀爬20 cm台阶时完全相同。由于台阶变高,四足机器人受足端运动空间的限制,其单腿绝对跨距减小至20 cm。在攀爬过程中各关节转角和力矩变化规律如图5。

图5 攀爬30 cm台阶关节角度变化规律
腿3关节3的力矩需求在攀爬过程的某个阶段超过了液压缸所能提供的最大力矩,这将导致机器人机体失衡。因此,四足机器人不能完成30 cm台阶攀爬实验。
4 四足机器人协同越障能力分析
研究两个机器人相互配合进行台阶攀爬具有重要意义。为实现机器人间的相互配合,根据文献[6]-[9]美国波士顿动力公司开发的新一代BigDog在机体上安装有机械臂,能够实现对重物的夹取和移动,因此可以作为机器人协同越障实验的参考实验对象。
机器人机械臂的机械结构可以参考大型工程机械的机械臂结构[9]。将机械臂安装至机器人机体重心的正上方,这样能够很大程度上减小机器人机体平衡算法的复杂性。安装有机械臂的四足机器人结构如图6。图6中所示机械臂主要由6部分组成。整个机械臂采用液压系统驱动,能够实现对吊臂夹吊装置的控制,进而实现两机器人之间的链接与分离。

图6 装备机械臂的步行机动平台
由单个机器人攀爬台阶实验可知,在单个机器人攀爬30cm台阶时,腿3出现了关节力矩不足的问题。因此在协同越障过程中,需要提供外力的机器人在腿3处提供额外的力以保证爬台阶机器人不会因腿3支撑力不足出现倾翻现象,同时还要保证腿3能够有足够的力能够完成爬台阶动作。
通过之前仿真可知,机械臂只需提供腿3处所需支撑力的1/4便可以保证腿3处有足够的支撑力。因此假设机械臂对攀爬机器人吊耳提供F=Mg/4=416.5N的竖直向上的力,并且在一个步态周期中保持恒定。此时,为保持协助机器人的机体平衡,需要腿部侧伸,同时前腿向前伸展,机体略向后以增大支撑面积。
从单个机器人攀爬实验可知,机器人攀爬台阶总共需要6个步态周期。在第五周期中由于机体过分倾斜,腿3出现支撑力不足的问题。因此需要在第四周期结束后,利用机械臂对机器人提供竖直向上的拉力以保证攀爬机器人的平衡。整个协同越障的过程如图7所示。
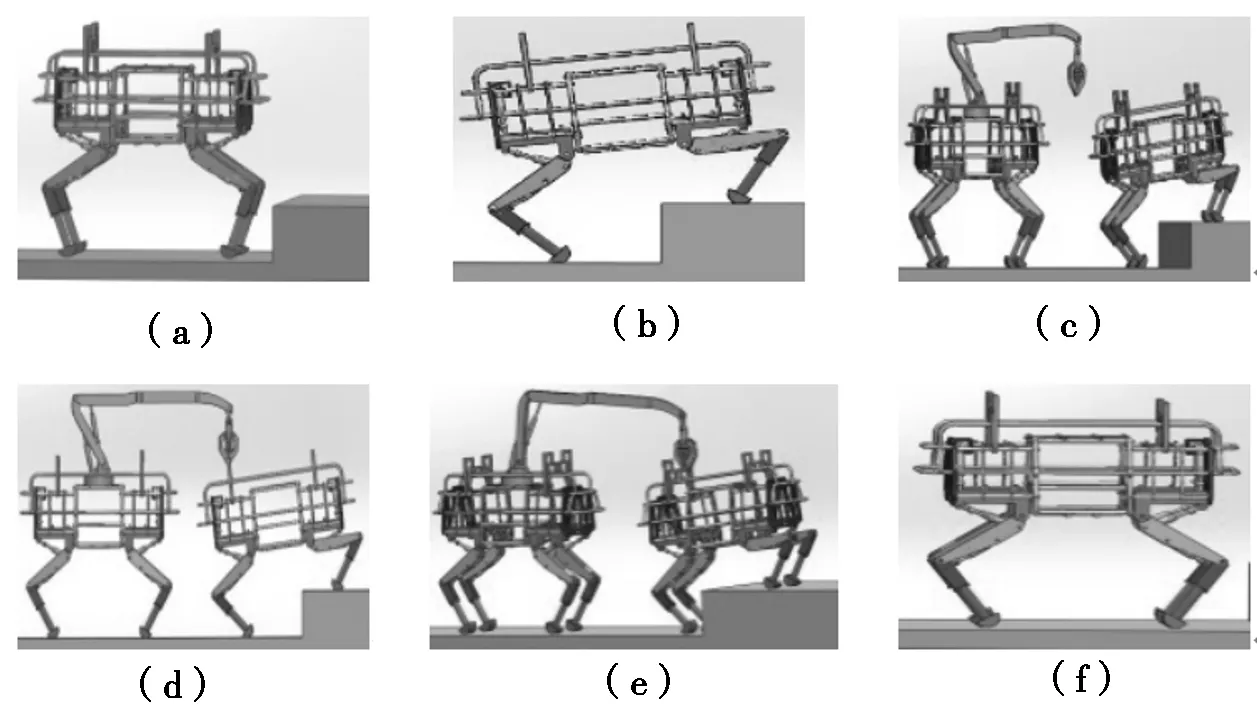
图7 协同上台阶的过程
5 协助机器人稳定性分析
在两个机器人协同攀爬台阶过程中,由于协助机器人需要利用机械臂提供外力,因此自身受到一个垂向力和一个翻转力矩的影响。
5.1 机械臂受力分析
在机械臂提供外力时,机械臂受到一垂向力的作用,主臂的受力图如图8所示。图8中FT为夹取装置对主臂的作用力,Fx2与Fy2为主臂与基臂之间在水平方向和竖直方向的作用力,Fe2为与主臂连接的液压缸对主臂的推力,φ2为其与竖直方向的夹角,Gj2为主臂自身重力。
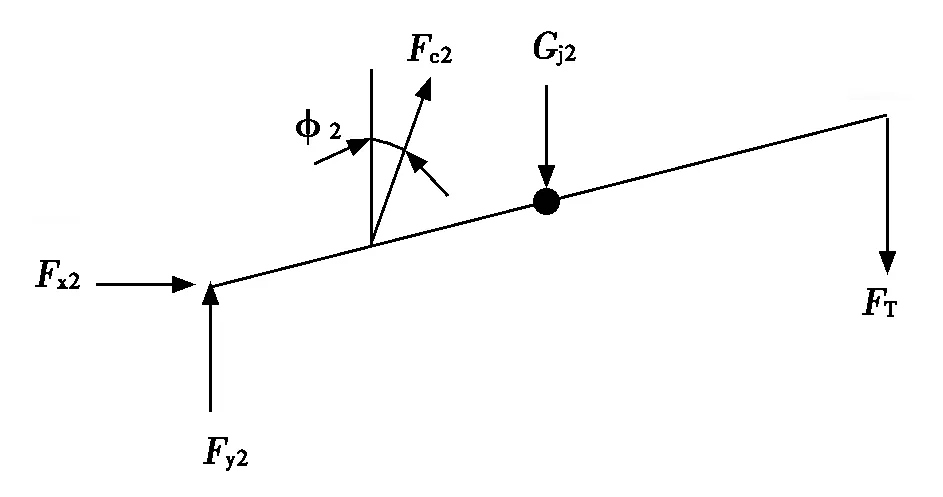
图8 主臂受力图
由于攀爬机器人在攀爬过程中移动速度较慢,所以夹取装置的移动速度不会很快,由此可以假设机械臂在施加力的过程中处于平衡状态。由主臂受力分析可得:
(1)
基臂受力如图9,图中Fx1、Fy1分别为基臂与转动基座之间在水平方向和竖直方向的作用力,Fc1为与转动基座连接的液压缸对基臂的推力,φ1为其与竖直方向的夹角,Gj1为基臂自身重力。
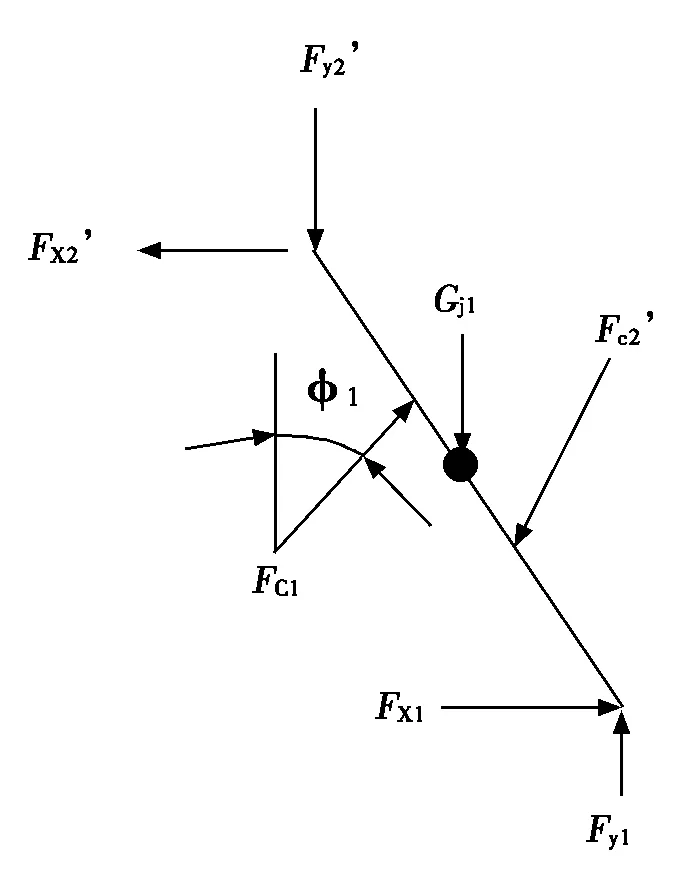
图9 基臂受力图
所以,
(2)
机械臂对协助机器人机体的作用力如图10所示,图中为机械臂除主臂与基臂外其余构件的重力。
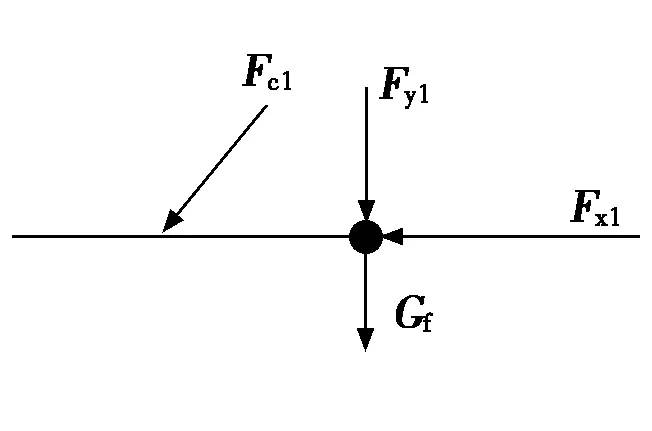
图10 机械臂给机体作用力
所以,
(3)
6 总结
通过对非典型地形的分析,将地形中常见的凸起、凹坑等障碍物总结抽象为台阶,然后基于足端运动空间对单个机器人攀爬台阶进行了分析,总结出在动力学、运动学分析下的攀爬极限,然后探讨了两个机器人协作攀爬30cm台阶的过程,并进行了稳定性分析。
