舰载飞行器打击水面舰艇编队队形识别和目标选择方法
2020-03-23刘文一朱良明赵志博
刘文一,孙 伟,朱良明,赵志博
(1.中国人民解放军91550部队41分队,辽宁 大连 116023;2.海军航空大学岸防兵学院,山东 烟台 264001; 3.中国人民解放军91049部队,山东 青岛 266102)
水面舰艇编队作战是各国海军的主要作战样式,而使用舰载飞行器远程打击水面舰艇编队,均面临目标识别和目标选择的问题[1]。
现代海上作战环境越来越复杂,应用反舰飞行器打击水面舰艇是常用的作战方式,而目标识别是反舰飞行器能否精确命中目标的关键技术,因此反舰飞行器能否准确识别目标已经成为影响反舰飞行器作战效能的关键因素之一。目前新型反舰飞行器的射程大大提升,并采用了新的制导技术和目标捕捉体制,基本上解决了单个目标“打得着”的问题,但是对如何在有干扰情况下有效打击水面舰艇编队的问题,还没有很好地解决。
从反舰飞行器使用角度讲,若要进行目标识别和目标选择,其手段就是改变飞行器导引头的搜索区域。若扩大搜索区域,则搜索覆盖范围越大,被搜索到的目标也会更多。而目标与目标之间的间距直接影响反舰飞行器捕捉精度,反舰飞行器导引头的搜索区范围,相对于水面舰艇编队舰艇之间的距离来说一般都比较大,其搜索区能覆盖到整个编队或其大部分范围;舰艇之间的间距越小,则反舰飞行器对特定目标的选择性就会越差,使用反舰飞行器打击编队时,若不采取措施,采用扩大飞行器搜索区域捕捉到特定目标的概率会大大降低。但是若要提高飞行器的目标选择精度,则需要缩小飞行器末制导装置的搜索区范围,但这样又会降低飞行器捕捉目标的概率;因此采用传统上单纯扩大或缩小飞行器导引头搜索区域的方法来识别水面舰艇编队特定目标的方法是行不通的,理想的方法是通过提高反舰飞行器的队形识别能力来提高对编队中特定目标的打击能力。因此,准确识别海上编队队形,合理选择打击目标,能够给作战指挥员提供有用信息,并帮助作战指挥员合理选择武器并对价值目标进行有效打击[2-5]。
1 队形识别方法
为了达到特定作战目的并迷惑对方,舰艇编队往往会以某种方法加以隐蔽,这就需要准确识别其编队队形,为舰载飞行器打击提供目指信息[6]。
水面舰艇编队虽然种类很多,但是其基本队形离不开几种基本形式,而且大部分具有相似性,这些队形多为日常训练的队形,可以通过一定的情报获得;而基本队形都在直线、圆及其组合的范围内。Hough变换是模式识别领域用于检测直线、圆、椭圆等形状的有效方法。K-均值算法则是聚类分析中基于划分方法的一种经典算法,它可以得到对应初始聚类中心向量的最优分类。因此,采用Hough变换和K-均值算法来识别水面舰艇编队队形,有着方法简单、结果准确、耗时较少的优点。
1.1 Hough变换原理及算法
Hough变换的基本原理是利用点与线的对偶性原则,将原始图像空间的曲线通过其数学表达式变为参数空间的一个点,这样就把图像空间中曲线的检测问题转化为寻找参数空间中的峰值问题[7]。
1.1.1Hough变换基本思想
在直角坐标系中,直线方程的表达式为:
y=kx+b(k为斜率、b为截距)
(1)
式(1)的等价变换为:
b=-kx+y
(2)
在式(2)中,假如将x,y看作参数,而将k看成自变量,那么在x-y平面内的任一点(xi,yi)则对应k-b平面中的一条直线[8-9]。由于x-y平面中的每一条直线均可由参数(k,b)唯一确定,从而x-y平面内同一条直线上的点能够确定参数空间的多条直线,且这些直线在k-b平面中相交与同一点,则此点能够定义x-y平面内以该坐标为参数的直线[8],如图1所示。
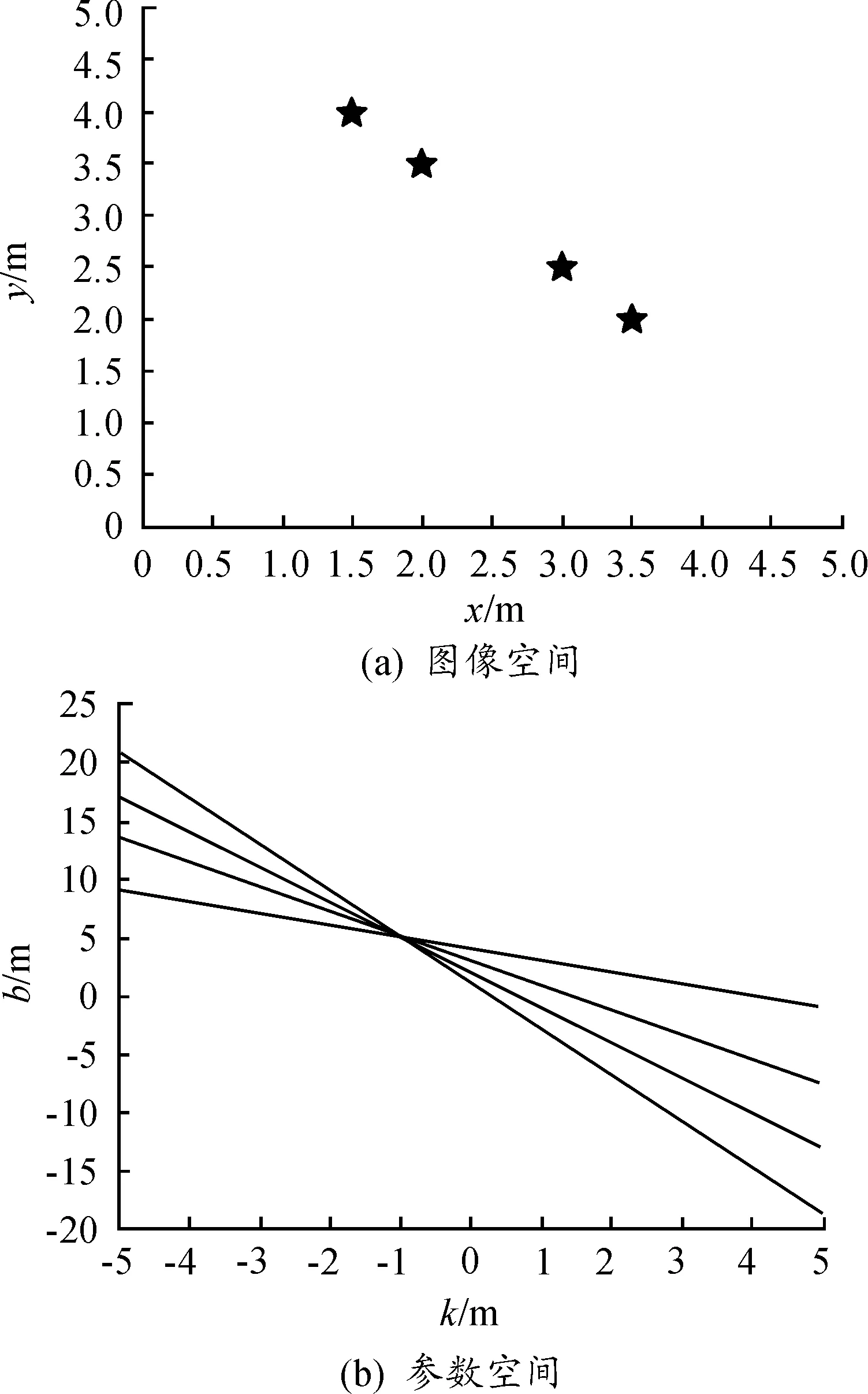
图1 直线Hough变换映射图
从图1中可以看出,在图像空间中处于同一条直线y=-x+5上的4个点:(1.5,4)、(2,3.5)、(3,2)、(4,1.5),通过函数变换b=-kx+y可以分别转换为参数空间中的4条直线:b=-1.5k+4、b=-2k+3.5、b=3k+2和b=4k+1.5。且这4条直线在参数空间交于点(-1,5),这个交点的坐标则正好确定了图像空间的直线[9]。
1.1.2标准Hough变换过程
在Hough变换中,如果将直线的斜率-截距式作为变换函数,那么如果在图像空间存在垂直于x轴的直线,那么这条直线在参数空间中将难以表达,从而也不可能在参数空间中检测其峰值[10]。
为了解决此问题,Dude和Hart将极坐标引入Hough变换,得到变换函数如下[11]:
ρ=xcosθ+ysinθ
(3)
式中:ρ为从图像空间的原点到该空间内直线的垂线长度;θ为此垂线与x轴的夹角。从而图像空间中的任意一点(xi,yi)正好对应参数空间中的一条正弦曲线;同理图像空间中在同一条直线上的点可确定参数空间的多条正弦曲线,且这些正弦曲线相交于同一点:(xi,yi),因而此交点可以确定原图像空间中直线的参数[12]。
这样,如果把数据空间上的这些点的信噪比分布到各相应的参数空间的正弦曲线上,然后进行叠加,那么在这些正弦曲线的交点上会出现一个峰值,从而就把判断图像空间中的各交点是否在一条直线上的问题转化为在θ-ρ平面内找到一簇正弦曲线的交点。
1.2 K-均值聚类算法
K-均值聚类算法是一种硬聚类算法,是一种典型的基于类中心的目标函数聚类分析算法。它将数据点到类中心的某一种距离的和作为优化的目标函数,通过求解目标函数极值的方式得到迭代运算的调整规则。
假设X=(x1,x2,…,xn)是具有n个数据对象的集合,xi=(xi1,xi2,…,xim)(i=1,2,…,n)是具有m维变量的数据对象,数据集X分为k类:W1,W2,…,Wk。K-均值算法采用误差平方和准则函数作为其目标函数,则目标函数和类中心公式如下:
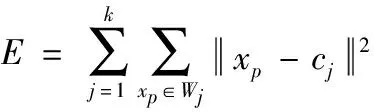
(4)

(5)
式中:cj(j=1,2,…k)是类Wj中样本的平均值;nj表示类Wj中的数据样本量。可以看出目标函数E是有关于样本和聚类中心的函数,它试图找到令目标函数值最小的k个类,使最终生成的聚类结果满足内紧凑、类之间独立的要求。若E值越大,则说明误差越大,表明聚类效果越差。
1.3 队形识别算法
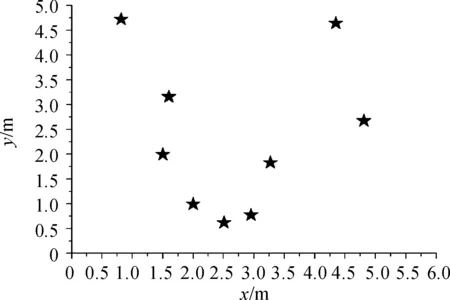
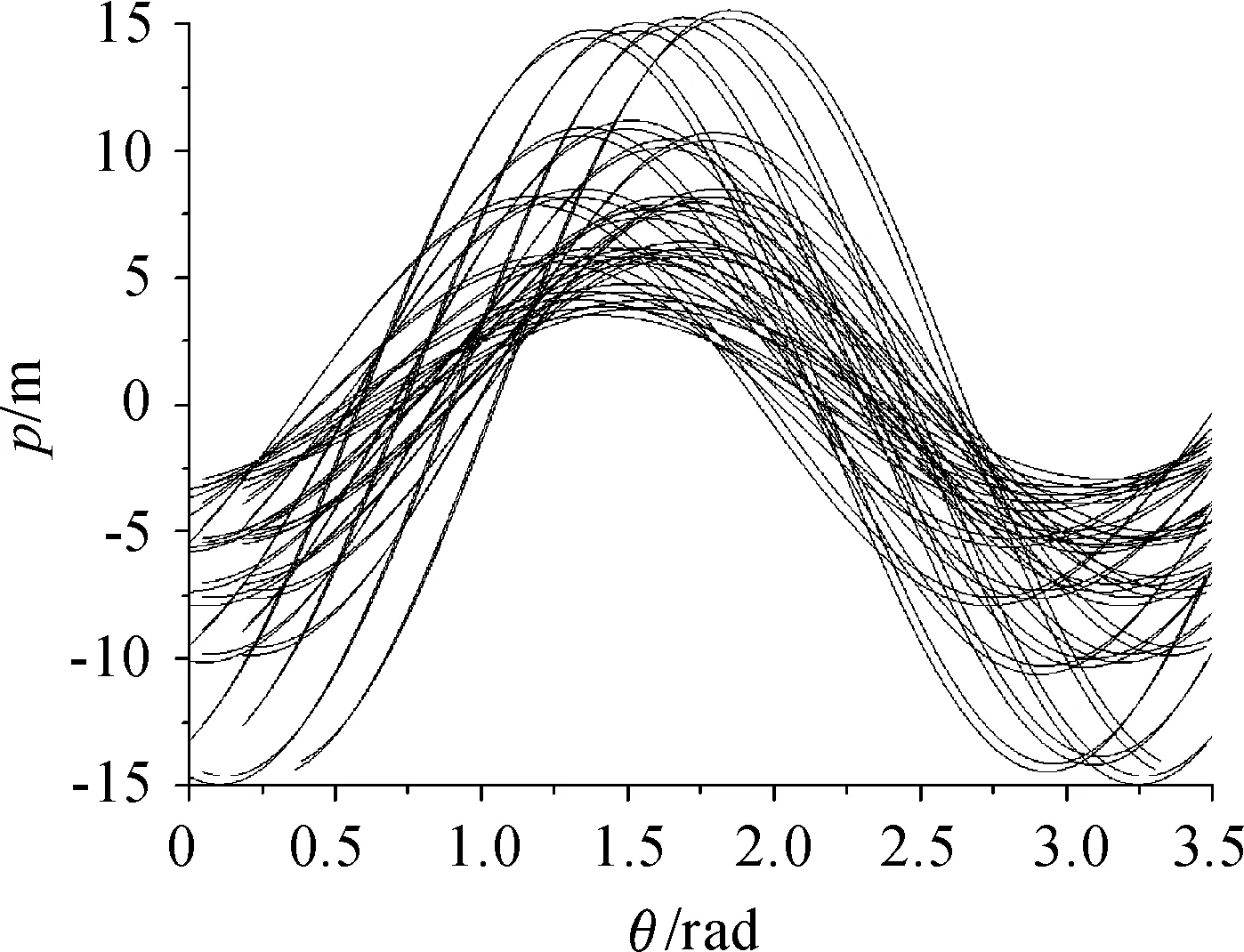
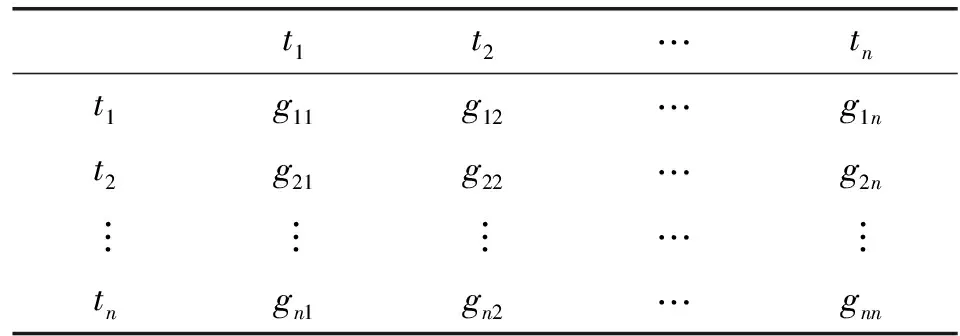
1)进行Hough变换:在区间[0,π)中均匀取M个点θj,由θj和队形成员的坐标(xi,yi),可得到在θj处队形成员所对应的正弦曲线上的取样点(θj,ρij),其中ρij=xicosθj+yisinθj,1≤i≤mG,0 3)交点聚类并提取峰值:采用上一步得到的所有交点,提取出积累矩阵中的峰值; 4)确定队形:将队形特征点与特征模板进行匹配,从而最终确定队形。 某水面舰艇以某形编队航行,在噪声和杂波干扰情况下,雷达探测到其图像空间的编队队形如图2所示,通过Hough变换得到参数空间的示意图,如图3所示。 图2 图像空间的V形编队 图3 Hough变换后的参数空间的V形编队示意图 从其中可以清楚的地看到由于噪声存在,使原本应该只有两个交点的曲线具有多个交点。而且局部峰值出现峰值簇拥现象,难以判断出编队队形,如图4所示,对于峰值簇拥的情况,采用K-均值聚类算法来提取局部峰值,如图5所示。 图4 噪声干扰下的积累矩阵局部峰值 通过聚类提取后的局部峰值如图6所示,可见明显消除了杂波干扰的影响。最终识别出该编队队形为V形编队,如图7所示。 图6 聚类后提取到的局部峰值 图7 编队队形识别结果 每种编队都有其特定的作战任务,比如反舰编队的任务就是打击敌方重火力舰艇,对陆编队的任务是打击敌方陆上重要目标。识别出编队队形后,在编队中选择判定目标的重要性类型,然后决定打击目标的优先等级,以便确定舰载飞行器打击顺序,实现我方特定的作战任务。在选择打击目标时,要考虑以下因素: 1)与我方作战意图的相关性; 2)在同类目标中,相对价值的重要性; 3)目标的不可替代性; 4)易于识别、易于攻击和易于毁伤。 目前实现目标优选的方法有价值工程法、层次分析法和效能分析法等。相比其他方法,价值工程法有着简单易实施、打分母本大、耗时较少的优点,能充分体现各作战指挥员的作战思想,因此,一般用价值比较的方法来实现目标优选[13]。 价值工程法是通过评定一组事物相对价值来排序的数学方法,适合对一组目标的重要性进行排序[14]。 对于待评定的目标集: T={t1,t2,…,tn} 将目标集中的各个元素作为行和列,就可以构造出两两比较重要性的价值工程评分矩阵,即以t1,t2,…,tn为行和列的n×n矩阵,如表1所示。 表1 价值工程的评分矩阵 评分表中的矩阵元素是将行目标和列目标两两进行比较的相对得分。由ti和tj对比得到矩阵的第i行第j列元素gij的值和第j行第i列元素gji的值。其中gij表示ti相对于tj的重要性,而gji表示tj相对于ti的重要性。以“0~4评分法”评定得分,如表2所列,评分的规则是0~4的整数给出gij和gji的值,并且要求gij+gji=4。对于同一目标无需比较,故对角线元素gii≡0。 将表2中各行不同列的元素求和,得到行相对应目标的总得分,即ti的总得分为: (6) 各目标总得分的相对值就是目标的价值: (7) 在本文1.4节中,识别出敌方V形编队为防空编队,我方打击目标有:防空火力舰(t1)、护卫舰(t2)、驱逐舰(t3)和补给舰(t4),按“0~4评分法”两两比较评定相对得分,如表3所示。 从而得到价值工程的评分矩阵: 各目标的总得分为: G1=11,G2=9,G3=1,G4=3 从而计算出各目标的价值: V1=11/24,V2=3/8,V3=1/24,V4=1/8 最终根据目标的价值将其进行重要性排序:t1>t2>t4>t3。 可以采用多名作战指挥员打分法填写评分表。最终价值由各作战指挥员评分值的平均值得出: (8) 式中:m为作战指挥员人数,上标(j)表示由第j各作战指挥员的评分计算出的目标价值。作战指挥员评分与作战指挥员个人的主观因素有关,但多名作战指挥员的均值具有一定的客观性。作战指挥员评分的综合也可使用加权平均方法,对于首长和主要作战指挥员的评分应给予较高权重。 1)通过Hough变换,将探测到的目标从图形空间转换到参数空间,采用K-均值聚类算法进行聚类,可提取到杂波干扰消除后的局部峰值特征点,将队形特征点与特征模板进行匹配,再结合其运动特性,可准确识别编队队形; 2)通过价值工程法对目标进行两两对比打分,然后以价值大小排序,从而为使用舰载飞行器实施打击提供依据; 3)采用Hough变换和K-均值算法识别水面舰艇编队队形,易于实施、识别结果准确、耗时较少,可以大幅度提高编队识别率,缩短作战准备时间;采用价值工程法选择打击目标,可以扩大打分母本、减少战斗决策时间,充分体现并发挥各级指战员的作战思想,最大化实现我方特定作战意图。
1.4 算例分析



2 打击目标选择方法
2.1 目标优选的价值工程法
2.2 算例分析
3 结论
