基于MATLAB/Simulink的横风作用下车辆侧向动力学仿真
2020-03-22梅辉秦永法张浩文
梅辉 秦永法 张浩文
摘 要:本文研究了车辆在横风作用下的侧向动力学特性。首先通过分析车辆的结构特征和运动特征建立2WS数学模型,其次确定作用于模型上的横风力数值,得出车辆在直线稳态行驶状况下受到阶跃横向载荷后的力学方程。最后使用MATLAB/Simulink搭建相应模型,对车辆系统进行仿真,通过改变模型输入参量的大小分析车辆在横风作用下的横摆角速度和侧向加速度响应。研究车辆在横风作用下的力学特性将有助于提高驾驶的安全性,更好的规避交通事故风险。
关键词:横风 2WS模型 横摆角速度 侧向加速度 仿真
Simulation of Vehicle Lateral Dynamics under Cross Wind based on MATLAB/Simulink
Mei Hui,Qin Yongfa,Zhang Haowen
Abstract:This paper studies the lateral dynamics of vehicles under cross wind. Firstly, the 2WS mathematical model is established by analyzing the structural characteristics and movement characteristics of the vehicle. Secondly, the transverse wind force value acting on the model is determined, and the mechanical equation of the vehicle under the steady-state driving condition of a straight line after a step lateral load is obtained. Finally, the paper, by using MATLAB/Simulink, builds a corresponding model to simulate the vehicle system, and analyzes the vehicle's yaw rate and lateral acceleration response under cross wind by changing the size of the model input parameters. Studying the mechanical characteristics of vehicles under crosswinds will help improve driving safety and better avoid the risk of traffic accidents.
Key words:cross wind, 2WS model, yaw rate, lateral acceleration, simulation
1 引言
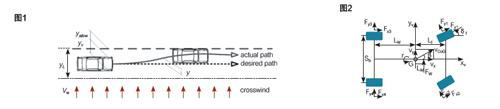
橫风是指从车辆侧面方向的来风,一般出现在大桥、海边、山谷、隧道等地区,当有大型客货车超车时也会产生横风作用。运动中的车辆受到多种空气动力,如拖力、升力和侧向力。对于体型较大,重心较高的车辆在高速行驶状态下,升力往往会降低车辆的附着力,此时较大的侧向力载荷容易导致车辆出现侧偏的现像,使得车辆的行车轨迹发生变化(如图1所示),严重时就会发生交通事故。
2 车辆横向动力学模型
2.1 转向轮角度关系
车辆转向时,转向轮的转角受到转向机构和轮胎刚度的影响。根据阿克曼几何学原理,当车轮发生偏转时,其外侧车轮转向角δ0和内侧车轮转向角δi应符合如下关系[1]:
其中tkp为两主销轴线与地面交点的距离;L为车辆轴距。车辆转向时只有满足该条件,车轮才作纯滚动。但在实际中,车轮转向梯形机构很难在整个转向范围内均满足该条件,内外轮转向角的关系通常在上式所示的关系和平行几何关系间变化。
为了平衡动力学模型的精确性和计算简便性,假设本模型中前内外侧车轮的几何学关系为平行几何关系,即转向时内外侧车轮的转角相等,都为δf 。同时假设转向轮的侧偏刚度和侧偏角相同。
2.2 横向运动数学建模
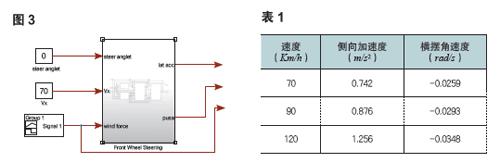
在只考虑特定力的情况下对车辆的运动进行数学描述,运动方程基于车辆的几何结构和参数。两轮转向动力学模型(2WS),其结构如如图2所示,该模型以车辆的纵向为X轴,横向为Y轴,垂向为Z轴,建立坐标系,车辆的重心为G点[2]。
其中:Fx-轮胎纵向力;Fy-轮胎横向力;δf -前轮转向角;Sb-车宽;Lf-重心至前轴的距离;Lr-重心至后轴的距离;Ψ-横摆角速度;Vx-车辆质心速度在X轴的分量;Vy-车辆质心速度在Y轴的分量;β-质心侧偏角。根据2WS模型,车辆在纵向的运动学方程为:
车辆在横向的运动学方程为:
重心G处的力矩平衡公式为:
假设车辆以恒定的速度前行,没有油门和刹车输入,其受力平衡表达式为[4]:
Cf-前轮侧偏刚度;Cr-后轮侧偏刚度;α-轮胎侧偏角。将式2-4、2-5、2-6分别代入公式2-1、2-2、2-3中,同时代入横风力Fw和轮胎侧偏角计算公式[3],公式如下:
最终得到以侧向加速度和横摆角速度为输出的动力学方程:
3 MATLAB/Simulink仿真
3.1 建立Simulink模型
由前文的数学模型可知,输入为车辆纵向速度Vx、横风力Fw以及前轮转向角δf,输出为车辆横向加速度Vy和横摆角速度Ψ。在Simulink/Library Broswer(模块库)中选择所需模块,根据前后轮侧偏角公式、侧向加速度公式和横摆角速度公式建立相应的子系统模块,对各模块中的参数进行赋值,参照某一中型客车Cf、Cr取77130N/rad,Lf、Lr和Lw取2.10、2.36和0.40m,m取5950kg。此外,采用Signal Builder模块模拟横风输入,在4s时风力由0N增加至2400N,风力持续时间为0.3秒,此后风力降至0N,信号时长设置为10秒[4]。连接各个子系统,得到的仿真结构图如下:
3.2 仿真结果分析
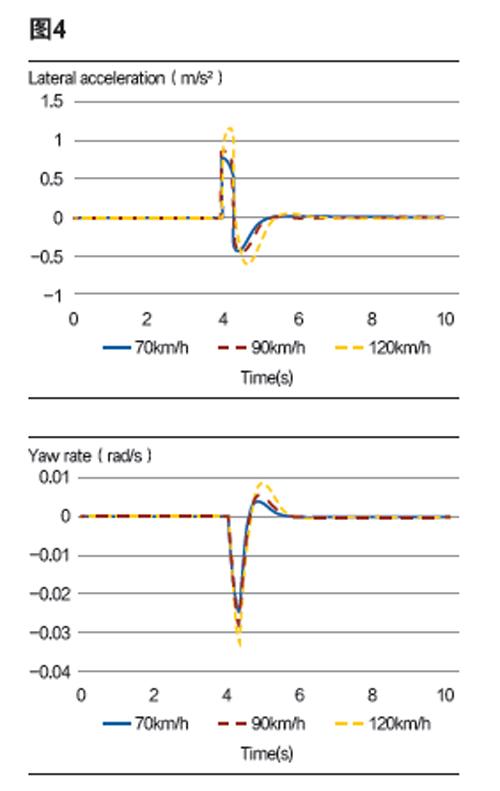
当模型中的转向角输入为0,车速输入为70、90、120 Km/h时,得到的仿真结果如下图所示:
由图4可知:横风出现的瞬间,车辆的侧向加速度直线上升,在120Km/h的车速下达到峰值1.256 m/s2(正值表示加速度方向沿着曲率中心一侧),结果符合文献[5]中侧向角加速度不超过2m/s的规定,车辆处于可控稳定状态。横风消失时,由于车辆侧向阻尼的影响,加速度数值又迅速下降至负值,此后经过大约1.4秒,侧向加速度变为0。横摆角速度的规律也大致如此,其数值先是急剧下降,达到谷值-0.0348 rad/s,此后又急速上升达到正峰值,最后变为0。各速度下侧向加速度和横摆角速度极值如下表所示:
此外在车速恒定的情况下,本文以+10°和-8°为前轮转向输值,运行模型结果显示:车辆在120Km/h的车速下,前轮的微小正转向角会导致车辆的侧向加速度急剧变化,其峰值达到2.611m/s2,超过安全规定阀值。同时其横摆角速度也大幅上升,不利于车辆行驶的稳定性。当转向轮的转角为-8°时,侧向加速度出现负极值,大小为-0.689m/s2,横摆角速度峰值为0.0168rad/s,且大小接近于零。可见转向盘的角度修正有利于车辆抵御横风,保证车辆的行驶稳定性。
参考文献:
[1]余志生.汽车理论(第3版)[M].北京:机械工业出版社,2000:103-132.
[2]冯超.基于Matlab/Simulink的电动汽车仿真模型设计与应用[D].中国科学院大学(工程管理与信息技术学院),2013.
[3]杜峰.基于线控技术的四轮主动转向汽车控制策略仿真研究[D].长安大学,2009.
[4]杨国伟.高速列车的关键力学问题[J].力学进展,2015,45(00):217-460.
[5]J.Post,and E.Law,“Modeling,characterization and simulation of automobile power steering systems for the prediction of on-center handling,”SAE#960178,1996.
